Управление моделью руки робота из САПР
Управление манипулятором, импортированным из САПР
В этом проекте мы импортировали модель робота-манипулятора из САПР и наладили управление механизмом согласно циклограмме, заданной в Engee.
Таким же образом можно организовать управление механизмом, собранном из любых STEP файлов с деталями или сборками любой сложности.
Описание модели
Представляем модель манипулятора, импортированную в программный комплекс Euler (https://www.euler.ru/), где под производится расчет многозвенной геометрической и кинематической модели, в то время как сигналы управления приходят из Engee через клиентскую программу Engee.Интеграции.
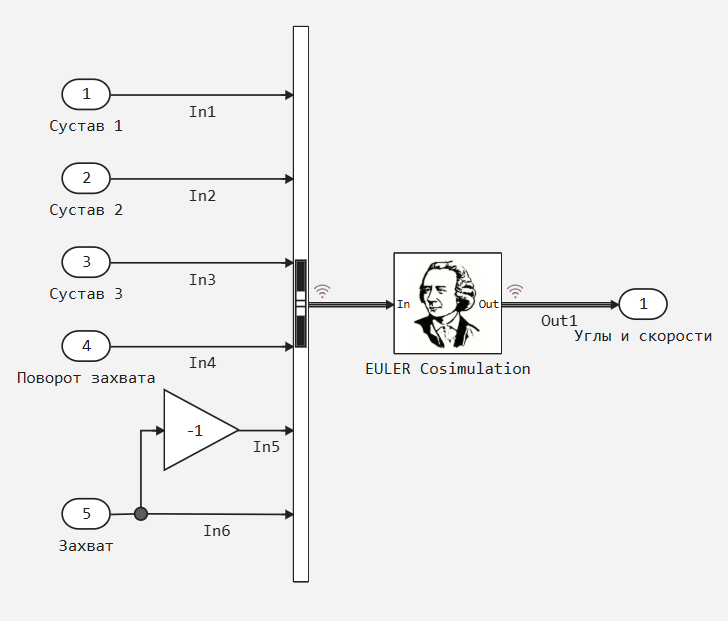
Со стороны Engee модель выглядит следующим образом.
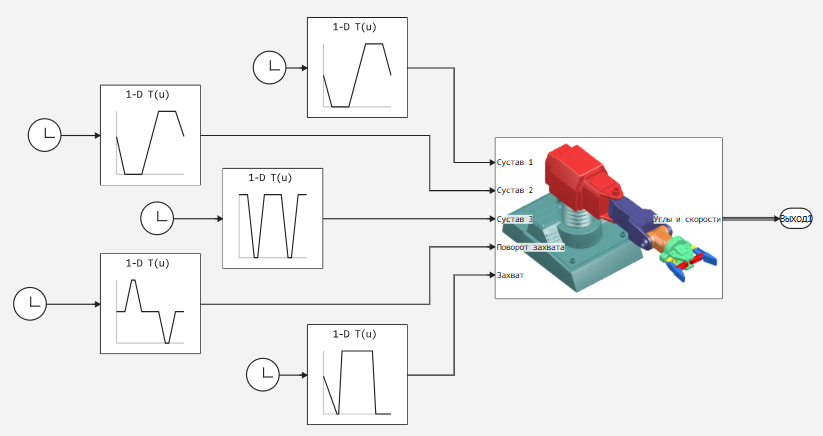
Изучив модель на стороне ПК Euler можно научиться импортировать файлы в формате STEP, массово-инерционные характеристики и связывать модель с Engee посредством блоков для косимуляции. Внутри модели манипулятора в Engee находится блок EULER Cosimulation, который отвечает за отправку данных на локальный компьютер, где работает платформа Euler.
Запуск модели в режиме косимуляции
Для подготовки окружения вы можете скачать папку robot_arm со всеми исходными файлами и распаковать ее на диск C:\ или в любую удобную папку. Следующие пункты тоже можно считать подготовительными действиями:
1. Откройте проект robot_arm.elr в ПК Euler.
2. Запустите сервис Engee.Интеграции, например - выполнив следующую ячейку.
engee.package.start("Engee-Device-Manager")
3. Запустите программу engee-device-manager и укажите ей адрес для проброса портов, полученный из предыдущей команды. Нажмите "Подключиться".
Теперь мы готовы запустить обе модели на выполнение:
4. Запустите модель в Engee. Дождитесь приглашения в клиентской программе Engee.Интеграции.
5. Запустите модель в ПК Euler.
Обе модели будут запущены на расчет, платформы Euler и Engee будут обмениваться данным для совместного расчета моделей.
Заключение
Сборка и расчет многозвенной системы в программном комплексе Euler позволяет нам не программировать самостоятельно геометрические преобразования и кинематические взаимоотношения деталей, оставив эту проблема на стороне САПР, где создаются модели деталей и устройств, и сосредоточиться на моделировании электронной части, моторов, пневматики и систем управления такими механизмами.