Быстрое прототипирование
Быстрое прототипирование алгоритмов управления на КПМ РИТМ: шаговый двигатель
В этом примере показано, как использовать машину реального времени - КПМ РИТМ в задачах быстрого прототипирования алгоритмов управления. Объектом управления выступает маломощный шаговый двигатель, управляемый двухплечевым сдвоенным MOSFET-драйвером, приём-передача управляющих сигналов производится посредством модуля цифровых входов/выходов КПМ РИТМ GP-LC-45.
Введение
Быстрое прототипирование алгоритмов управления в реальном времени (Rapid control prototyping, RCP)- это метод моделирования, который позволяет быстро оценивать работу систем управления в процессе их проектирования. Такой подход позволяет проводить быстрые итерации при разработке алгоритмов управления в реальном окружении, не обладая профессиональными навыками программиста.
Принципы работы модели объекта управления, а также модели системы управления подробно описаны в примере полношагового управления биполярным шаговым двигателем.
Следующий после моделирования в Engee шаг разработки системы управления - этап быстрого прототипирования. Он может быть бесшовно реализован в Engee переключением среды моделирования на машину реального времени. Для успешной настройки и начала работы с КПМ РИТМ удобно будет воспользоваться примером Быстрый старт с КПМ РИТМ
При успешном прохождении этапа быстрого прототипирования и отладки системы управления на машине реального времени можно перейти к полноценному переносу системы управления на встраиваемые системы. Engee позволяет автоматически генерировать код Си для встраивания модели системы управления в пользовательские проекты для встраиваемых систем. Этому процессу посвящён пример генерации кода для STM32, который продолжает текущий пример.
Модель примера
Модель исходного примера разбита на данном этапе на две части:
- Прототип системы управления (подсистема
Control System) - Модель объекта управления (цепь от подсистемы
Gate Driverдо сигналовSpeedиPositionна выходе двигателя)
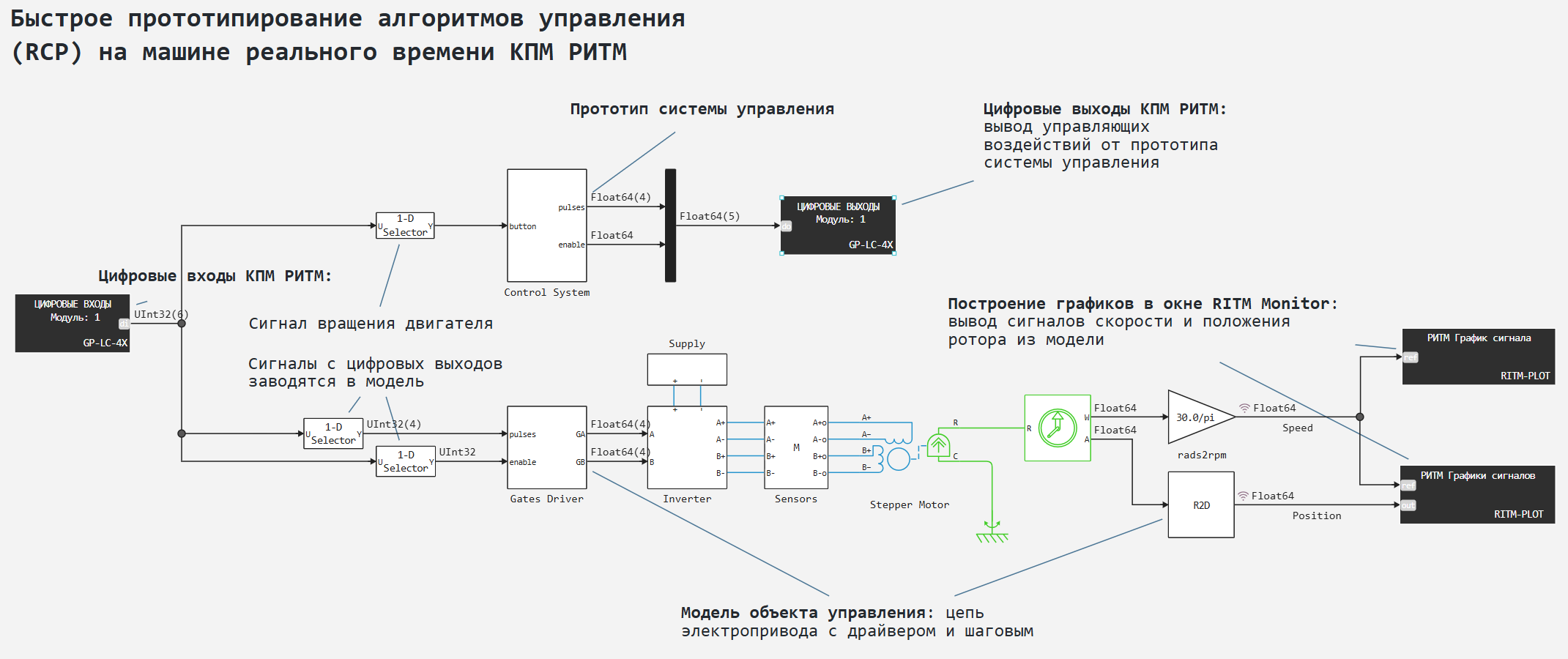
Входным воздействием для модели-прототипа системы управления служит сигнал "Start" запуска вращения шагового двигателя. Этот сигнал система управления получает от цифрового входа периферийного модуля общего назначения GP-LC-45 КПМ РИТМ.
Выходные воздействия модели системы управления - сигнал включения драйвера, а также сигналы управления ключами драйвера передаются на цифровые выходы того же периферийного модуля.
Кроме того, выходные сигналы из модели системы управления передаются в модель объекта управления - для этого цифровые выходы периферийного модуля соединены с его же цифровыми входами. Они в свою очередь и заводят полученные сигналы в модель объекта управления.
Результаты работы модели - записываемые сигналы частоты вращения и угла вращения вала шагового двигателя передаются на блоки C Function RITM-PLOT, которые в процессе выполнения модели на машине реального времени выводят графики в приложение RITM Monitor.
Периферия КПМ РИТМ в модели
Для работы с периферийным модулем общего назначения GP-LC-45 и его цифровыми входами-выходами в частности, в модели используются соответствующие блоки из раздела РИТМ библиотеки блоков Engee, с настройками
- GP-LC-4x DI: модуль 1, 6 каналов
- GP-LC-4x DO: модуль 1, 5 каналов
Таким образом, в модуле GP-LC-45 задействованы цифровые входы DI1-DI6 и цифровые выходы DO1-DO5
Шаг расчёта блоков соответствует шагу расчёта модели (100 мкс).
Блоки RITM-PLOT, как было сказано выше выводят графики сигналов: 1 блок - график частоты вращения вала, 2 блок - графики частоты вращения и угла поворота вала. Шаг расчёта блоков больше и составляет 10 мс.
Подключение объекта управления
Модуль GP-LC-45 подключен к 37-пиновому клеммному модулю GP-RT-Terminal-37 v1.0. Для расключения цепей в этом примере необходимо воспользоваться распиновкой - таблицей назначения пинов клеммного модуля.
Используемые в этом примере клеммы:
- 01 -
DGND(цифровая земля) - 02 -
+3.3 V(питание 3.3 В) - 35 -
DI6(сигнал "Start" от кнопочного контакта) - 08 -
DO5(сигнал включения модуля драйвера) - 10, 29, 09, 28 -
DO1,DO2,DO3,DO4(сигналы управления ключами драйвера) - 16 -
DI5(сигнал включения модуля драйвера для модели объекта управления) - 18, 37, 19, 36 -
DI1,DI2,DI3,DI4(сигналы управления ключами драйвера для модели объекта управления)
Ниже приведена схема подключений клеммного модуля и элементов объекта управления.
После подготовки модели и окружения, а также расключения всех цепей и подачи питания перейдём к выполнению модели на машине реального времени. Это позволит нам отладить управляющие алгоритмы в процессе быстрого прототипирования.
Выполнение модели
Запустим модель на КПМ РИТМ в режиме "Интерактивного выполнения". Сформируем сигнал "Start" нажатиями на кнопочный контакт. На графиках модели в Engee происходят следующие изменения сигналов:
.png)
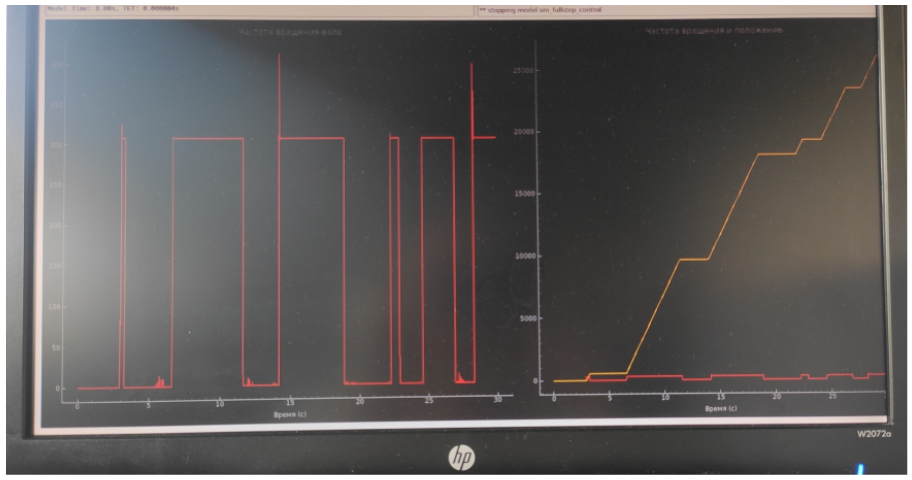
Аналогичные графики будут наблюдаться и на экране монитора, подключенного к машине реального времени:
.png)
Параллельно с этим, вращение вала шагового двигателя наблюдается невооружённым глазом:
Заключение
В примере мы использовали подход быстрого прототипирования алгоритмов управления на комплексе полунатурного моделирования РИТМ. Исходная модель системы управления и объекта была разработана и отлажена в Engee. На текущем этапе мы связали систему управления с периферийными модулями машины реального времени, параллельно моделировали работу объекта управления на РИТМ. Прототип системы управления воспроизводит идентичные и заданные воздействия для управления двигателем. Далее можно переходить к переносу системы управления на встраиваемую систему.