Формирование диаграмм направленности
Cинтез диаграмм направленности антенных решёток c использованием глубокого обучения
В примере демонстрируется, как спроектировать и обучить сверточную нейронную сеть, которая вычисляет веса элементов антенной решётки для формирования требуемого шаблона диаграммы направленности.
Введение
Веса элементов решетки позволяют формировать диаграмму направленности таким образом, чтобы она соответствовала заданной.
Методы глубокого обучения в последние годы показали отличные результаты в компьютерном зрении и обработке естественного языка. Несмотря на то что обучение нейронной сети требует времени и проводится оффлайн, после обучения сеть способна мгновенно выдавать результат. Это делает возможным синтез шаблонов в реальном времени.
Импорт библиотек
!pip install -r /user/Demo_public/data_analysis/directional_pattern/requirements.txt
В данном примере будет проведён разведочный анализ данных, включающий первичный осмотр структуры набора, изучение распределений признаков и целевой переменной, выявление пропусков, выбросов и дубликатов, а также анализ корреляций между переменными. На следующем этапе будут построены и обучены модели регрессии с целью прогнозирования целевой переменной и оценки качества их работы с помощью подходящих метрик. Дополнительно будет выполнен анализ важности признаков, что позволит определить, какие из них вносят наибольший вклад в предсказания модели и могут считаться наиболее значимыми для исследуемой задачи.
import os, glob, time, datetime, copy
import numpy as np
import cvxpy as cp
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader, random_split
from torchvision import transforms, models
from PIL import Image
Определим вспомогательные функции
Визуализация
DB_FLOOR = -80
def plot_pattern_cut(az_grid, el_grid, pat_db, el0=0.0, title=None):
idx = int(np.argmin(np.abs(el_grid - el0)))
plt.figure(figsize=(6,4.2))
plt.plot(az_grid, pat_db[idx, :])
plt.xlabel('Азимут'); plt.ylabel('Относительный уровень, дБ')
plt.title(title); plt.grid(True); plt.tight_layout(); plt.show()
def plot_pattern_2d(az_grid, el_grid, pat_db, db_floor=-60, title='Beam Pattern'):
pat_db = np.clip(pat_db, db_floor, 0)
AZ, EL = np.meshgrid(az_grid, el_grid)
plt.figure(figsize=(6.6,5.2))
cf = plt.contourf(AZ, EL, pat_db, levels=40)
plt.contour(AZ, EL, pat_db, levels=np.arange(db_floor, 1, 5), colors='k', linewidths=0.4, alpha=0.4)
plt.colorbar(cf, label='dB')
plt.xlabel('Azimuth (deg)'); plt.ylabel('Elevation (deg)')
plt.title(title); plt.tight_layout(); plt.show()
def plot_aperture(pos, r):
y, z = pos[:,1], pos[:,2]
plt.figure(figsize=(5,5))
plt.scatter(y, z, s=80)
circ = plt.Circle((0,0), r, fill=False, ls='--', lw=1.5)
plt.gca().add_artist(circ)
plt.gca().set_aspect('equal', 'box')
plt.xlabel('y (m)'); plt.ylabel('z (m)')
plt.grid(True, alpha=0.3)
plt.tight_layout(); plt.show()
Синтез весов
def get_circular_planar_positions(r=3.0, delta=0.5, wavelength=1.0):
ys = np.arange(-r, r + 1e-9, delta)
zs = np.arange(-r, r + 1e-9, delta)
Y, Z = np.meshgrid(ys, zs, indexing='xy')
mask = (Y**2 + Z**2) <= r**2 + 1e-9
y = Y[mask].ravel()
z = Z[mask].ravel()
x = np.zeros_like(y)
pos = np.c_[x, y, z] / wavelength
return pos.astype(float), pos.shape[0]
def dir_unit_vector(az_deg, el_deg):
az = np.deg2rad(az_deg); el = np.deg2rad(el_deg)
c = np.cos(el)
return np.array([c*np.cos(az), c*np.sin(az), np.sin(el)])
def steering_vector(pos, az_deg, el_deg):
u = dir_unit_vector(az_deg, el_deg)
phase = 2*np.pi * (pos @ u)
return np.exp(1j * phase)
def steering_matrix(pos, az_list, el_list):
A = []
for az, el in zip(az_list, el_list):
A.append(steering_vector(pos, az, el).conj())
return np.vstack(A) if A else np.zeros((0, pos.shape[0]), dtype=complex)
def array_response_fast(pos, w, az_grid, el_grid):
az = np.deg2rad(np.asarray(az_grid))
el = np.deg2rad(np.asarray(el_grid))
ca, sa = np.cos(az), np.sin(az)
ce, se = np.cos(el), np.sin(el)
ux = np.outer(ce, ca)
uy = np.outer(ce, sa)
uz = np.outer(se, np.ones_like(az))
phase = 2*np.pi * (pos[:,0,None,None]*ux + pos[:,1,None,None]*uy + pos[:,2,None,None]*uz)
A = np.exp(1j*phase)
val = np.tensordot(np.conj(A), w, axes=(0,0))
pat = 20*np.log10(np.maximum(np.abs(val), 1e-12))
pat -= np.max(pat)
return pat
def make_side_region(az_span, el_span, step=0.5, exclude=set()):
azs = np.arange(az_span[0], az_span[1] + 1e-9, step)
els = np.arange(el_span[0], el_span[1] + 1e-9, step)
return [(az, el) for az in azs for el in els if (az, el) not in exclude]
def db2lin_amp(db): return 10**(db/20.0)
def synthesize_mask_l2(pos, main_dir, null_dirs=None, null_db=None,
side_dirs=None, side_db=None):
a_d = steering_vector(pos, *main_dir).conj()
A_i = steering_matrix(pos, *(zip(*null_dirs)) if null_dirs else ([], []))
A_s = steering_matrix(pos, *(zip(*side_dirs)) if side_dirs else ([], []))
N = pos.shape[0]
w = cp.Variable(N, complex=True)
cons = [a_d @ w == 1]
if A_i.size and null_db is not None:
r_i = np.atleast_1d(null_db)
r_i = np.full(A_i.shape[0], db2lin_amp(r_i[0])) if r_i.size==1 else db2lin_amp(r_i)
cons += [cp.abs(A_i @ w) <= r_i]
if A_s.size and side_db is not None:
r_s = np.atleast_1d(side_db)
r_s = np.full(A_s.shape[0], db2lin_amp(r_s[0])) if r_s.size==1 else db2lin_amp(r_s)
cons += [cp.abs(A_s @ w) <= r_s]
prob = cp.Problem(cp.Minimize(cp.norm(w, 2)), cons)
prob.solve(verbose=False)
if w.value is None: raise RuntimeError("Оптимизация не сошлась")
return np.asarray(w.value).ravel()
def normalize_weights(w, ref_idx=0):
w = w / (np.linalg.norm(w) + 1e-12)
w *= np.exp(-1j*np.angle(w[ref_idx]))
return w
def align_scale_phase(w_hat, w_true):
alpha = (np.vdot(w_hat, w_true) / (np.vdot(w_hat, w_hat) + 1e-12))
return alpha * w_hat
def db_to_uint8(pat_db, db_floor=DB_FLOOR):
pat = np.clip(pat_db, db_floor, 0.0)
img01 = (pat - db_floor) / (0.0 - db_floor)
return (img01 * 255.0).astype(np.uint8)
Зададимся переменными
LR = 1e-4
WEIGHT_DECAY = 1e-2
SEED = 123
SAVE_DIR = "./beam_ds_simple"
NUM_SAMPLES = 1500
IMAGE_SIZE = 224
DB_FLOOR = -80.0
BATCH_SIZE = 32
EPOCHS = 20
MODEL_PATH = "beamformer_resnet18.pth"
RADIUS = 3.0
DELTA = 0.5
LAMBDA = 1.0
Решетки
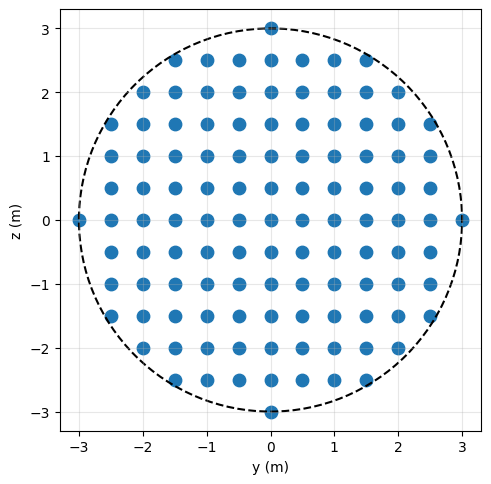
Рассмотрим круговую плоскую антенную решетку радиусом 3 метра. Элементы расположены на прямоугольной сетке с шагом 0,5 метра.
Для генерации координат рассмотри функцию get_circular_planar_positions
r, delta, lamb = RADIUS, DELTA, LAMBDA
pos, N = get_circular_planar_positions(r, delta, lamb)
plot_aperture(pos, r=r)
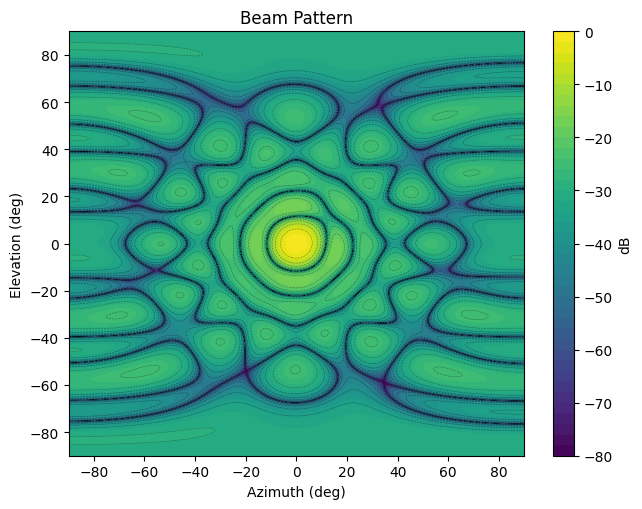
Синтез шаблонов с использованием оптимизации
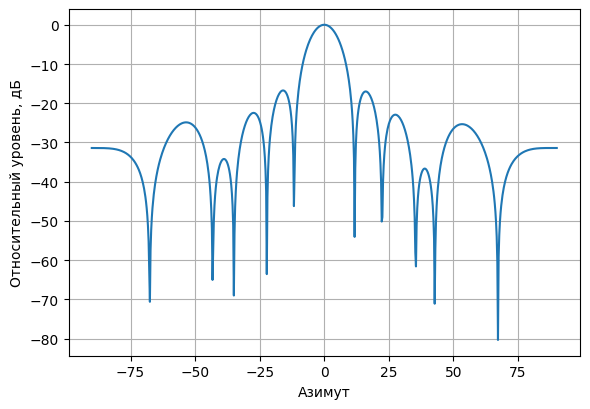
Предположим, что требуется сформировать диаграмму направленности, у которой главный лепесток ориентирован на азимут и угол места 0°. При этом шаблон должен удовлетворять следующим условиям:
- Максимизировать направленность;
- Подавить помехи на уровне 30 дБ ниже главного лепестка;
- Обеспечить уровень боковых лепестков в пределах от –20° до 20° по азимуту или углу места не выше –17 дБ относительно главного лепестка.
main_dir = (0.0, 0.0)
interfs = [(12.0, 10.0), (13.0, 10.0)]
interfs_db = [-30.0, -30.0]
az_bands = [(-20, -10), (10, 20)]
el_bands = [(-20, -10), (10, 20)]
exclude = set(interfs)
side_pts = []
for az_span in az_bands:
for el_span in el_bands:
side_pts += make_side_region(az_span, el_span, step=0.5, exclude=exclude)
Синтезируем веса решетки
w1 = synthesize_mask_l2(
pos, main_dir,
null_dirs=interfs, null_db=interfs_db,
side_dirs=side_pts, side_db=-17.0
)
Получим паттерн решетки
az_plot = np.arange(-90, 90.001, 0.25)
el_plot = np.arange(-90, 90.001, 0.25)
pat1 = array_response_fast(pos, w1, az_plot, el_plot)
plot_pattern_cut(az_plot, el_plot, pat1, el0=0.0)
plot_pattern_2d(az_plot, el_plot, pat1, db_floor=-80)
Далее нужно сгенерировать датасет. Для это воспользуемся отдельной функцией, которая перебирает параметры, на основе которых синтезируется решетка
def generate_and_save(n=300, save_dir="./beam_ds", seed=42):
rng = np.random.default_rng(seed)
os.makedirs(save_dir, exist_ok=True)
r, delta, lamb = 3.0, 0.5, 1.0
pos, N = get_circular_planar_positions(r, delta, lamb)
az_plot = np.arange(-90, 90.001, 0.25)
el_plot = np.arange(-90, 90.001, 0.25)
file_paths = []
for i in range(n):
main_dir = (rng.uniform(-5, 5), rng.uniform(-3, 3))
K = int(rng.integers(1, 4))
interfs = []
for _ in range(K):
interfs.append((
rng.uniform(8, 25),
rng.uniform(8, 15)
))
interfs_db = list(rng.uniform(-35, -25, size=K))
shift = rng.uniform(-3, 3)
az_bands = [(-20+shift, -10+shift), (10+shift, 20+shift)]
el_bands = [(-20, -10), (10, 20)]
exclude = set((float(a), float(e)) for a, e in interfs)
side_pts = []
for az_span in az_bands:
for el_span in el_bands:
side_pts += make_side_region(az_span, el_span, step=0.5, exclude=exclude)
side_db = -17.0
w = synthesize_mask_l2(
pos, main_dir,
null_dirs=interfs, null_db=interfs_db,
side_dirs=side_pts, side_db=side_db
)
pat_db = array_response_fast(pos, w, az_plot, el_plot)
out_path = os.path.join(save_dir, f"sample_{i:05d}.npz")
np.savez_compressed(
out_path,
pos=pos.astype(np.float32),
weights=w.astype(np.complex64),
pattern_db=pat_db.astype(np.float32),
r=np.float32(r), delta=np.float32(delta), wavelength=np.float32(lamb),
main_dir=np.array(main_dir, dtype=np.float32),
interfs=np.array(interfs, dtype=np.float32),
interfs_db=np.array(interfs_db, dtype=np.float32),
side_db=np.float32(side_db),
az_plot=az_plot.astype(np.float32),
el_plot=el_plot.astype(np.float32),
)
file_paths.append(out_path)
return file_paths
paths = generate_and_save(n=1000, save_dir="./beam_ds_simple", seed=123)
print("Сохранено файлов:", len(paths))
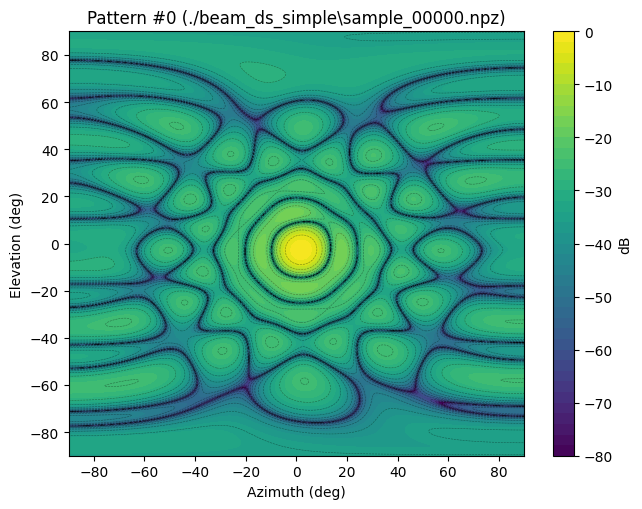
def visualize_samples(npz_files, db_floor=-80, title_prefix="Pattern"):
for i, path in enumerate(npz_files):
data = np.load(path, allow_pickle=True)
pat_db = data["pattern_db"]
az_plot = data["az_plot"]
el_plot = data["el_plot"]
plot_pattern_2d(
az_plot, el_plot, pat_db,
db_floor=db_floor,
title=f"{title_prefix} #{i} ({path})"
)
paths = generate_and_save(n=5, save_dir="./beam_ds_simple", seed=123)
visualize_samples(paths[:3], db_floor=-80)
.png)
.png)
Модель сети ИИ
Для синтеза паттернов с использованием глубокого обучения мы создаём сверточную нейронную сеть. Диаграмма направленности определяется в диапазоне азимута и угла места. Таким образом, эта диаграмма может быть представлена в виде изображения, которое наш входной слой принимает в качестве входных данных. Выходными данными являются веса, которые формируют такую диаграмму.
class ResNet18Beamformer(nn.Module):
def __init__(self, num_outputs, in_channels=1):
super().__init__()
self.model = models.resnet18(weights=None)
if in_channels == 1:
conv1 = self.model.conv1
self.model.conv1 = nn.Conv2d(
1, conv1.out_channels,
kernel_size=conv1.kernel_size, stride=conv1.stride,
padding=conv1.padding, bias=False
)
self.model.fc = nn.Linear(self.model.fc.in_features, num_outputs)
def forward(self, x): return self.model(x)
Определим девайс, на котором обучается модель, а также саму модель инициализируем. Сразу же переведем модель на ГПУ
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = ResNet18Beamformer(num_outputs=2*N, in_channels=1).to(device)
Разрузчик данных
Создадим загрузчики данных
class RadarPatternNPZ(Dataset):
def __init__(self, files, db_floor=DB_FLOOR, resize=IMAGE_SIZE):
self.files = files
self.db_floor = float(db_floor)
self.resize = int(resize)
self.transform = transforms.Compose([
transforms.Resize((self.resize, self.resize), interpolation=Image.BILINEAR),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
])
def __len__(self): return len(self.files)
def __getitem__(self, idx):
path = self.files[idx]
npz = np.load(path, allow_pickle=True)
pat_db = npz["pattern_db"]
img_u8 = db_to_uint8(pat_db, self.db_floor)
img = Image.fromarray(img_u8, mode="L")
x = self.transform(img)
w = npz["weights"].astype(np.complex64)
w = normalize_weights(w)
y = np.stack([w.real, w.imag], axis=1).astype(np.float32).ravel()
y = torch.from_numpy(y)
return x, y, path
def make_loaders(root_dir=SAVE_DIR, batch_size=BATCH_SIZE, seed=SEED):
files = sorted(glob.glob(os.path.join(root_dir, "sample_*.npz")))
if not files: raise FileNotFoundError("Нет .npz в " + root_dir)
gen = torch.Generator().manual_seed(seed)
n = len(files)
n_train = int(0.7 * n)
n_val = int(0.15 * n)
n_test = n - n_train - n_val
idx_train, idx_val, idx_test = random_split(range(n), [n_train, n_val, n_test], generator=gen)
train_ds = RadarPatternNPZ([files[i] for i in idx_train.indices])
val_ds = RadarPatternNPZ([files[i] for i in idx_val.indices])
test_ds = RadarPatternNPZ([files[i] for i in idx_test.indices])
return (
DataLoader(train_ds, batch_size=batch_size, shuffle=True, num_workers=0),
DataLoader(val_ds, batch_size=batch_size, shuffle=False, num_workers=0),
DataLoader(test_ds, batch_size=batch_size, shuffle=False, num_workers=0),
files
)
Некоторые вспомогательные функции для обучения и валидации сети
Определим функции, отвечающие за тренировку, валидацию
def train_one(model, loader, criterion, optimizer, device, amp_dtype=None):
model.train()
run_loss, run_mae, n = 0.0, 0.0, 0
for xb, yb, _ in loader:
xb, yb = xb.to(device, non_blocking=True), yb.to(device, non_blocking=True)
bs = xb.size(0)
optimizer.zero_grad(set_to_none=True)
with torch.autocast(device_type=device.type, dtype=amp_dtype) if amp_dtype else torch.cuda.amp.autocast(enabled=False):
yp = model(xb)
loss = criterion(yp, yb)
loss.backward(); optimizer.step()
run_loss += loss.item() * bs
run_mae += torch.mean(torch.abs(yp.detach() - yb)).item() * bs
n += bs
return run_loss/max(1,n), run_mae/max(1,n)
@torch.no_grad()
def evaluate(model, loader, criterion, device, amp_dtype=None):
model.eval()
run_loss, run_mae, n = 0.0, 0.0, 0
for xb, yb, _ in loader:
xb, yb = xb.to(device), yb.to(device)
bs = xb.size(0)
with torch.autocast(device_type=device.type, dtype=amp_dtype) if amp_dtype else torch.cuda.amp.autocast(enabled=False):
yp = model(xb)
loss = criterion(yp, yb)
run_loss += loss.item() * bs
run_mae += torch.mean(torch.abs(yp - yb)).item() * bs
n += bs
return run_loss/max(1,n), run_mae/max(1,n)
def train_model(model, train_loader, val_loader, device, epochs=EPOCHS, lr=LR, wd=WEIGHT_DECAY):
criterion = nn.MSELoss()
optimizer = torch.optim.AdamW(model.parameters(), lr=lr, weight_decay=wd)
amp_dtype = torch.bfloat16 if device.type == "cuda" else None
best_wts = copy.deepcopy(model.state_dict())
best_val = float("inf")
for ep in range(1, epochs+1):
tr_loss, tr_mae = train_one(model, train_loader, criterion, optimizer, device, amp_dtype)
val_loss, val_mae = evaluate(model, val_loader, criterion, device, amp_dtype)
if val_loss < best_val:
best_val, best_wts = val_loss, copy.deepcopy(model.state_dict())
print(f"Epoch {ep:02d}/{epochs} | train: loss {tr_loss:.5f}, mae {tr_mae:.5f} | val: loss {val_loss:.5f}, mae {val_mae:.5f}")
model.load_state_dict(best_wts)
return model
Функция для инференса
@torch.no_grad()
def predict_weights(model, pat_db, device):
# тот же препроцессинг, что и в датасете
img_u8 = db_to_uint8(pat_db, DB_FLOOR)
img = Image.fromarray(img_u8, mode="L")
tfm = transforms.Compose([
transforms.Resize((IMAGE_SIZE, IMAGE_SIZE), interpolation=Image.BILINEAR),
transforms.ToTensor(),
transforms.Normalize([0.5],[0.5]),
])
x = tfm(img).unsqueeze(0).to(device)
y = model(x).cpu().numpy().reshape(-1,2)
w_pred = y[:,0] + 1j*y[:,1]
w_pred = normalize_weights(w_pred) # фикс неопределённостей
return w_pred
Обучение модели
Разделим данные на три множества - тренирвоочное, тестовое и валидационное
Также определим функцию потель, оптимизатор для обучения сети и запустим сам цикл обучения
train_loader, val_loader, test_loader, files = make_loaders(SAVE_DIR, BATCH_SIZE, SEED)
print(f"Train/Val/Test sizes: {len(train_loader.dataset)}/{len(val_loader.dataset)}/{len(test_loader.dataset)}")
# 3) модель
criterion = nn.MSELoss()
optimizer = torch.optim.AdamW(model.parameters(), lr=LR, weight_decay=WEIGHT_DECAY)
amp_dtype = torch.bfloat16 if device.type == "cuda" else None
best_wts = copy.deepcopy(model.state_dict())
best_val = float("inf")
for ep in range(1, EPOCHS+1):
tr_loss, tr_mae = train_one(model, train_loader, criterion, optimizer, device, amp_dtype)
val_loss, val_mae = evaluate(model, val_loader, criterion, device, amp_dtype)
if val_loss < best_val:
best_val, best_wts = val_loss, copy.deepcopy(model.state_dict())
print(f"Epoch {ep:02d}/{EPOCHS} | train: loss {tr_loss:.5f}, mae {tr_mae:.5f} | val: loss {val_loss:.5f}, mae {val_mae:.5f}")
model.load_state_dict(best_wts)
print(f"Train/Val/Test sizes: {len(train_loader.dataset)}/{len(val_loader.dataset)}/{len(test_loader.dataset)}")
Тестирование обученной модели
Проведем оценку на тестовом множетсве обученной модели
crit = nn.MSELoss()
val_loss, val_mae = evaluate(model, test_loader, crit, device)
print(f"Test : loss {val_loss:.6f}, mae {val_mae:.6f}")
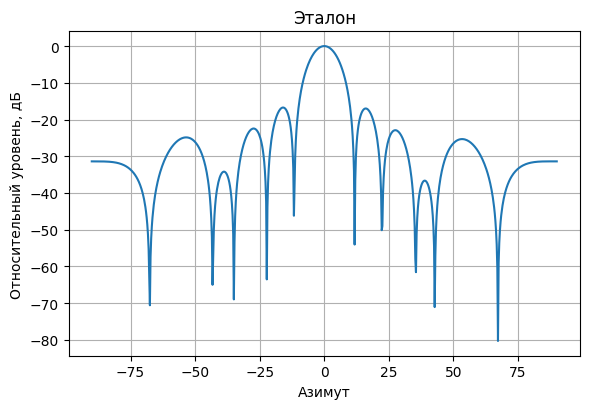
Протестируем модель на новом сгенерированном экземпляре данных
interfs = [(12.0, 10.0), (13.0, 10.0)]
interfs_db = [-30.0, -30.0]
az_bands = [(-20, -10), (10, 20)]
el_bands = [(-20, -10), (10, 20)]
exclude = set(interfs)
side_pts = []
for az_span in az_bands:
for el_span in el_bands:
side_pts += make_side_region(az_span, el_span, step=0.5, exclude=exclude)
w_ref = synthesize_mask_l2(pos, (0.0,0.0), interfs, interfs_db, side_pts, -17.0)
w_ref = normalize_weights(w_ref)
pat_ref = array_response_fast(pos, w_ref, az_plot, el_plot)
w_pred_new = predict_weights(model, pat_ref, device)
pat_pred_new = array_response_fast(pos, w_pred_new, az_plot, el_plot)
plot_pattern_cut(az_plot, el_plot, pat_ref, el0=0.0, title="Эталон")
plot_pattern_cut(az_plot, el_plot, pat_pred_new, el0=0.0, title="Предсказание")
plot_pattern_2d(az_plot, el_plot, pat_ref, db_floor=-80, title='Эталон')
plot_pattern_2d(az_plot, el_plot, pat_pred_new, db_floor=-80, title='Предсказание')
.png)
.png)
.png)
В целом модель дает приемлемое качесво на инференсе.
Выводы
В данном примере было показано, как генерировать диаграммы направленности и на них же обучать модель для предсказания весов