Модель асинхронного двигателя
Параметрирование асинхронного двигателя с короткозамкнутым ротором
В этом примере по паспортным данным асинхронного двигателя с короткозамкнутым ротором рассчитываем и моделируем асинхронный двигатель из раздела "Электричество" библиотеки блоков.
Введение
Пример параметрирования асинхронного двигателя (АД) с короткозамкнутым ротором (КЗР) приводился ранее для построения векторной диаграммы. Здесь приводится немного улучшенный код с паспортными данными другого двигателя. Последующее моделирование в Engee производится при помощи блока Асинхронная машина с короткозамкнутым ротором из раздела Электричество библиотеки блоков физического моделирования.
Исходные данные
Для примера расчёта и моделирования возьмём двигатель АИP132 S4 с частотой вращения 1455 об/мин. Его паспортные данные легко найти в интернете. Запишем их в соответствующие переменные кодовой ячейки ниже:
Pₙ = 7.5e3; Uₙ = 380; f₁ = 50; # Номинальная мощность [Вт], линейное напряжение [В], частота [В]
nₙ = 1455; p = 2; η = 0.87; # Номинальная частота вращения [об/мин], число пар полюсов, КПД
cosϕ = 0.83; Iₙ = 15.8; # Номинальный коэффициент мощности, номинальный ток [А], ток холостого хода [А]
ki = 7; mₚ = 2.3; mₘ = 2.3; J = 0.02; # Коэффициенты максимального тока, пускового и максимального момента, момент инерции двигателя [кг·м²]
Произведём промежуточные расчёты:
# Расчёт параметров схемы замещения
U₁ = Uₙ/sqrt(3); # Номинальное фазное напряжение статора [В]
n₀ = 60*f₁/p; # Синхронная частота вращения [об/мин]
sₙ = (n₀-nₙ)/n₀; sₖ = sₙ*(mₘ+sqrt(mₘ^2-1)); # Номинальное и критическое скольжение
ω₀ = 2π*f₁/p; ωₙ = π*nₙ/30; # Синхронная и номинальная углова скорость ротора [рад/с]
Mₙ = Pₙ/ωₙ; Mₘ = Mₙ*mₘ; Mₚ = Mₙ*mₚ; # Номинальный, максимальный и пусковой момент [Н·м]
pₘ = 0.05*Pₙ; # Механические потери (5% от Pₙ) [Вт]
R₂ = 1/3*(Pₙ+pₘ)/(Iₙ^2*(1-sₙ)/sₙ); # Приведённое активное сопротивление роторной обмотки [Ом]
C = 1.02; # Конструктивный коэффициент (предварительный)
R₁ = U₁*cosϕ*(1-η)/Iₙ - C^2*R₂ - pₘ/(3*Iₙ^2); # Активное сопротивление статорной обмотки [Ом]
L₁σ = L₂σ = U₁/(4π*f₁*(1+C^2)*ki*Iₙ); # Индуктивности рассеивания статора и приведённое ротора [Гн]
L₁ = L₂ = U₁/(2π*f₁*Iₙ*sqrt(1-cosϕ^2)-2/3*(2π*f₁*Mₘ*sₙ)/(p*U₁*sₖ)); # Индуктивности статора и приведённое ротора [Гн]
Lₘ = L₁ - L₁σ; # Индуктивность магнитной цепи [Гн]
Проведём несколько итерация с уточнением конструктивного коэффициента:
for i in 1:5
C = 1 + L₁σ/Lₘ # Конструктивный коэффициент (уточнённый)
R₁ = U₁*cosϕ*(1-η)/Iₙ - C^2*R₂ - pₘ/(3*Iₙ^2); # Активное сопротивление статорной обмотки [Ом]
L₁σ = L₂σ = U₁/(4π*f₁*(1+C^2)*ki*Iₙ); # Индуктивности рассеивания статора и приведённое ротора [Гн]
L₁ = L₂ = U₁/(2π*f₁*Iₙ*sqrt(1-cosϕ^2)-2/3*(2π*f₁*Mₘ*sₙ)/(p*U₁*sₖ)); # Индуктивности статора и приведённое ротора [Гн]
Lₘ = L₁ - L₁σ; # Индуктивность магнитной цепи [Гн]
println("Итерация №$i: Уточнённый конструктивный коэффициент C равен $C")
end
X₁σ = 2π*f₁*L₁σ; X₂σ = 2π*f₁*L₂σ # Реактивные сопротивления рассеивания статора и приведённое ротора [Ом]
Xₘ = 2π*f₁*Lₘ;
Все необходимые параметры для моделирования АДКЗР в Engee рассчитаны, перейдём к моделированию.
Параметры сети, нагрузки и двигателя, определённые выше также записаны в обратных вызовах модели примера. Это позволяет выполнять модель с параметрами "по умолчанию" без предварительного их расчёта.
Модель примера
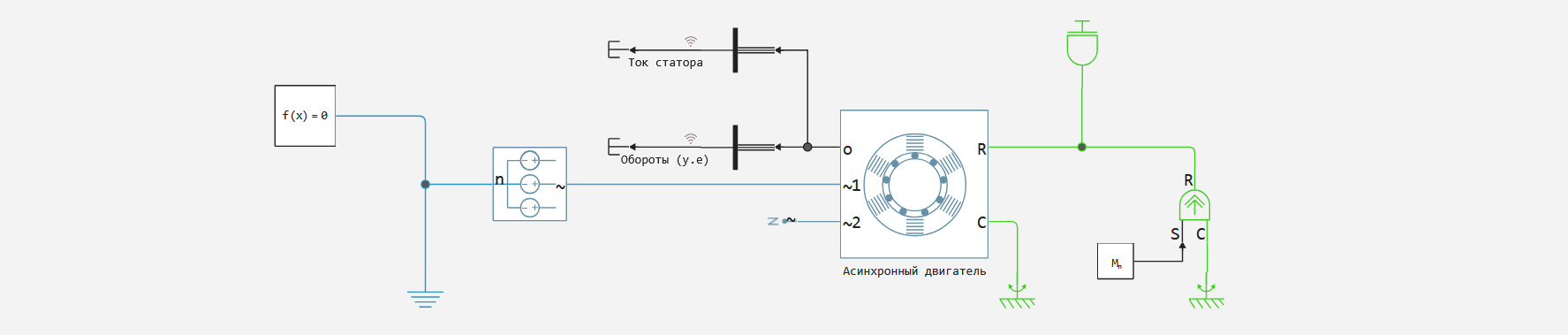
Модель примера представляет собой простейшую цепочку с блоком АД КЗР - двигатель включен в сеть напрямую, концы статорной обмотки соединены в "звезду", механическая нагрузка представлена источником момента и моментом инерции.
Запустим модель при помощи программного управления моделированием и подготовленных заранее функций для удобства работы с моделью и результатами симуляции:
example_path = @__DIR__; # Получаем абсолютный путь к директории, содержащей текущий скрипт
cd(example_path); # Переходим в директорию примера
include("useful_functions.jl"); # Подключаем скрипт Julia со вспомогательными функциями
simout = get_sim_results("im_parametrization.engee", example_path) #запускаем моделирование
Получим переменные записанных в модели сигналов:
t = get_sim_data(simout, "Ток статора", 1, "time");
Is = get_sim_data(simout, "Ток статора", 1, "value");
n = get_sim_data(simout, "Обороты (у.е)", 1, "value");
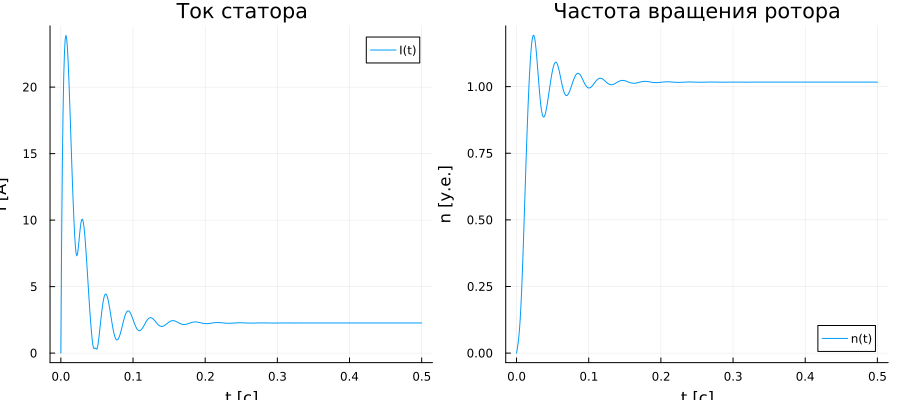
Построим графики этих переменных:
gr(aspectratio=:auto, xlims=:auto, ylims=:auto, size = (900,400))
I_graph = plot(t, Is; label = "I(t)", title = "Ток статора", ylabel = "I [A]", xlabel = "t [с]")
n_graph = plot(t, n; label = "n(t)", title = "Частота вращения ротора", ylabel = "n [у.е.]", xlabel = "t [с]")
plot(I_graph, n_graph)
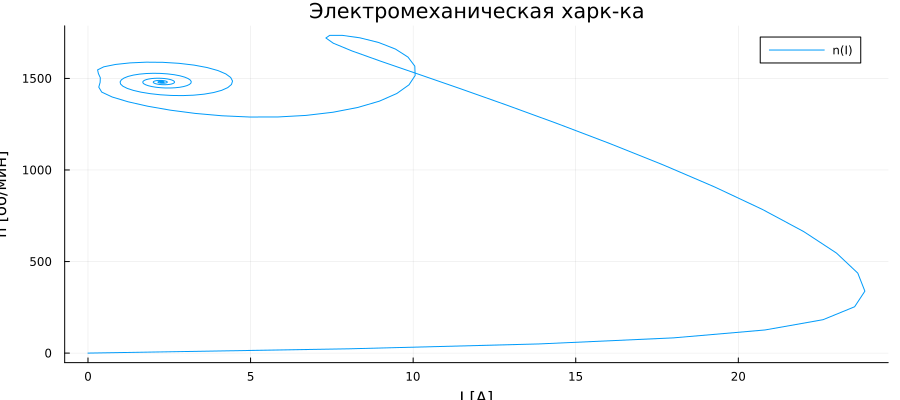
В заключение построим электромеханическую характеристику:
gr(aspectratio=:auto, xlims=:auto, ylims=:auto, size = (900, 400))
plot(Is, n.*nₙ; label = "n(I)", title = "Электромеханическая харк-ка", ylabel = "n [об/мин]", xlabel = "I [А]")
Заключение
В примере мы рассмотрели пример параметрирования модели асинхронного двигателя по паспортным данным из открытых источников, проведения моделирования АД КЗР и сбора данных. Далее можно перейти к разработке системы управления двигателем или моделированию технологического агрегата с данным двигателем.