Модель электрогидравлического усилителя гидропривода
Модель электрогидравлического усилителя рулевого гидропривода летательного аппарата
Электрогидравлический усилитель (ЭГУ) – динамическая система, содержащая электромеханический преобразователь (ЭМП), преобразующий электрический управляющий сигнал в механическое перемещение заслонки гидроусилителя, и гидроусилитель мощности, предназначенный для управления основным золотниковым распределителем рулевого гидропривода.
Структурная схема объекта моделирования приведена на рис.1, где – давление нагнетания, – давление слива.
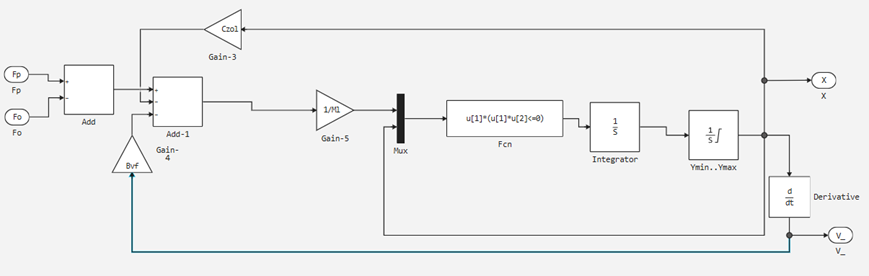
Рис. 1
Схема модели приведена на рис.2. Модель учитывает следующие процессы и особенности работы электрогидравлического усилителя:
- Динамическое запаздывание, вносимое индуктивностью обмоток электромеханического преобразователя,
- Колебательное звено механической системы электромеханического преобразователя,
- Силовое воздействие струй жидкости, вытекающей из сопел, на заслонку гидроусилителя,
- Изменение коэффициента расхода в рабочих зазорах «сопло-заслонка» от величины зазора,
- Собственное сопротивление сопел,
- Сжимаемость жидкости в торцевых камерах золотника,
- Вязкое трение в золотнике,
- Ограничение хода золотника упорами.
.png)
Рис. 2
Общая структура модели ЭГУ состоит из трех функциональных подсистем – электромеханического преобразователя (блок ‘ЕМТ1’), гидравлического усилителя «сопло-заслонка» (блок ‘Hydraulic Amplifier EGU1’) и блока типовых нагрузок (блок ‘Load’). Входными переменными основного блока гидроусилителя ‘Hydraulic Amplifier EGU1’ являются смещение заслонки ‘h’ и скорость движения плунжера золотника‘V’, выходными переменными являются сила от перепада давления на торцах золотника ‘Fy’, гидродинамическая сила реакции струй ‘Fhg’, перепад давления на торцах золотника ‘Рy’, расход жидкости гидроусилителя ‘Qin’.
Схема подсистемы гидравлического усилителя ‘Hydraulic Amplifier EGU1’ приведена на рис.3.
.png)
Рис. 3
Подсистема гидравлического усилителя содержит два одинаковых блока ‘Left_H_poten’, ‘Right_H_poten’, представляющих собой модель гидравлического моста и формирующих перепад давления ‘Py’ на торцах золотника. Внутренняя структура обоих блоков приведена на рис.4.
.png)
Рис. 4
Подсистемы ‘Left_H_poten’, ‘Right_H_poten’ динамически формируют перепад давления ‘Py’ с учетом сжимаемости рабочей жидкости как результат баланса расходов, втекающих в торцевые камеры золотника и вытекающих из них, а также учитывают изменение коэффициента расхода ‘Mu’ в рабочем зазоре «сопло-заслонка». Последний вычисляется в блоке ‘1 D Lookup Table’ по эмпирической зависимости как функция относительного открытия золотника ‘Zotn’. Для устранения алгебраического замкнутого контура вставлено звено задержки сигнала на один шаг интегрирования ‘Memory’ с начальным значением коэффициента расхода 0,71.
Структура подсистемы электромеханического преобразователя ‘ЕМТ1’ приведена на рис.5. Электромеханический преобразователь моделируется колебательным звеном (блок ‘Electro-mechanical converter’).
.png)
Рис. 5
Структура подсистемы нагрузок ‘Load’ приведена на рис.6. В качестве нагрузки принимается цилиндрический золотник, центрируемый двумя пружинами. Входными переменными этого блока являются сила от перепада давления на торцах золотника Fp и внешняя сила Fo, задаваемая вручную. Выходными переменными являются перемещение Х и скорость перемещения V золотника. В данной подсистеме учтены упоры плунжера золотника в ограничители его хода.
.png)
Рис. 6
Определение функции для загрузки и запуска модели:
function start_model_engee()
try
engee.close("EGU1.engee", force=true) # закрытие модели
catch err # в случае, если нет модели, которую нужно закрыть и engee.close() не выполняется, то будет выполнена её загрузка после catch
m = engee.load("$(@__DIR__)/EGU1.engee") # загрузка модели
end;
try
engee.run(m, verbose=true) # запуск модели
catch err # в случае, если модель не загружена и engee.run() не выполняется, то будут выполнены две нижние строки после catch
m = engee.load("$(@__DIR__)/EGU1.engee") # загрузка модели
engee.run(m, verbose=true) # запуск модели
end
end
Скрипт для задания входных переменных и запуска модели:
As = 1.96E-7;# сечение канала сопла, м
Azol = 2.83E-5;# площадь торца плунжера золотника, м^2
Bvf = 3.5;# коэффициент вязкого трения в золотнике
Cemp = 13600;# жесткость подвески якоря электромеханического преобразователя, Н/м
Czol = 185000;# суммарная жесткость центрирующих пружин золотника, Н/м
DZemp = 0.2;# коэффициент демпфирования колебательного звена электромеханического преобразователя
Ds = 0.0005;# диаметр сопла, м
E = 1.0E+9;# объемный модуль упругости жидкости, Па
Gdr = 2.16E-9;# гидравлическая проводимость балансного дросселя
Gn = 6.23E-9;# гидравлическая проводимость сопла
K1 = 0.914;# эмпирический коэффициент силы реакции струй на заслонку
KFi = 70;# коэффициент тяговой характеристики электромеханического преобразователя, Н/А
KK2 = 2540;# эмпирический коэффициент силы реакции струй на заслонку
Keds = 65;# коэффициент противоЭДС в обмотке электромеханического преобразователя
Ml = 0.005;# масса золотника вместе с пружинами, кг
Pk = 1.0E+7;#давление на входе в гидроусилитель, Па
Pr = 1.0E+6;#давление на выходе гидроусилителя, Па
Ps = 2.8E+7;#давление нагнетания, Па
R = 600;# активное сопротивление электрической цепи управления электромеханического преобразователя, Ом
TL = 0.00133;# постоянная времени апериодического звена электрической цепи электромеханического преобразователя, 1/с
Temp = 0.0005;# постоянная времени колебательного звена электромеханического преобразователя, 1/с
V = 1.975E-6;#объем жидкости под торцами золотника при его нейтральном положении, м^3
Ymax = 0.001;#положение правого упора золотника, м
Ymin = -0.001;# положение левого упора золотника, м
Yo = 0;#начальное положение золотника, м
Zo = 5E-5;# зазор между соплом и заслонкой в нейтральном положении, м
n = 2E-5;#коэффициент кинематической вязкости жидкости, м^2/с
ro = 880;#плотность жидкости, кг/м^3
start_model_engee();
Запись результатов моделирования в переменные:
time_ = simout["EGU1/h, mm.1"].time[:]
h_result = simout["EGU1/h, mm.1"].value[:]
Q_result = simout["EGU1/Q, lmin.1"].value[:]
Py_result = simout["EGU1/Py, MPa.1"].value[:]
Результаты моделирования для ступенчатого входного сигнала с напряжением 15 В в течение 0,04 с приведены на графиках ниже.
using Plots
plot(time_, h_result, linewidth=2, xlabel="Время, с", ylabel="Ход заслонки h, мм", legend=false)
plot(time_, Q_result, linewidth=2, xlabel="Время, с", ylabel="Потребляемый расход Q, л/мин", legend=false)
plot(time_, Py_result, linewidth=2, xlabel="Время, с", ylabel="Давление гидроусилителя Ру, МПа", legend=false)
Источник: Гидравлические агрегаты и приводы систем управления полётом летательных аппаратов: информационно-справочное пособие / под общ. ред. Редько П.Г. - М.: Олита, 2004. - 472 с.