Эффект Джанибекова
Моделирование эффекта Джанибекова
В данном примере будет показано моделирование эффекта Джанибекова - нестабильного вращения твердого тела вокруг средней оси инерции. Модель демонстрирует, как небольшое возмущение при вращении вокруг промежуточной оси приводит к периодическому "перевороту" объекта в пространстве.
.gif)
Эффект Джанибекова проявляется при вращении асимметричного твердого тела вокруг оси с промежуточным моментом инерции. Согласно теореме о промежуточной оси, такое вращение неустойчиво - малейшее возмущение приводит к периодическому "перевороту" объекта.
Условие возникновения: I₁ < I₂ < I₃, где I₂ - момент инерции относительно средней оси.
Начальное возмущение: .
Схема модели:
Для реализации модели вращения в данном примере используется блок Engee Function, в котором, с помощью кода, были реализованы уравнения Эйлера для свободного вращения:
Также в этом блоке описывается кинематика кватернионов:
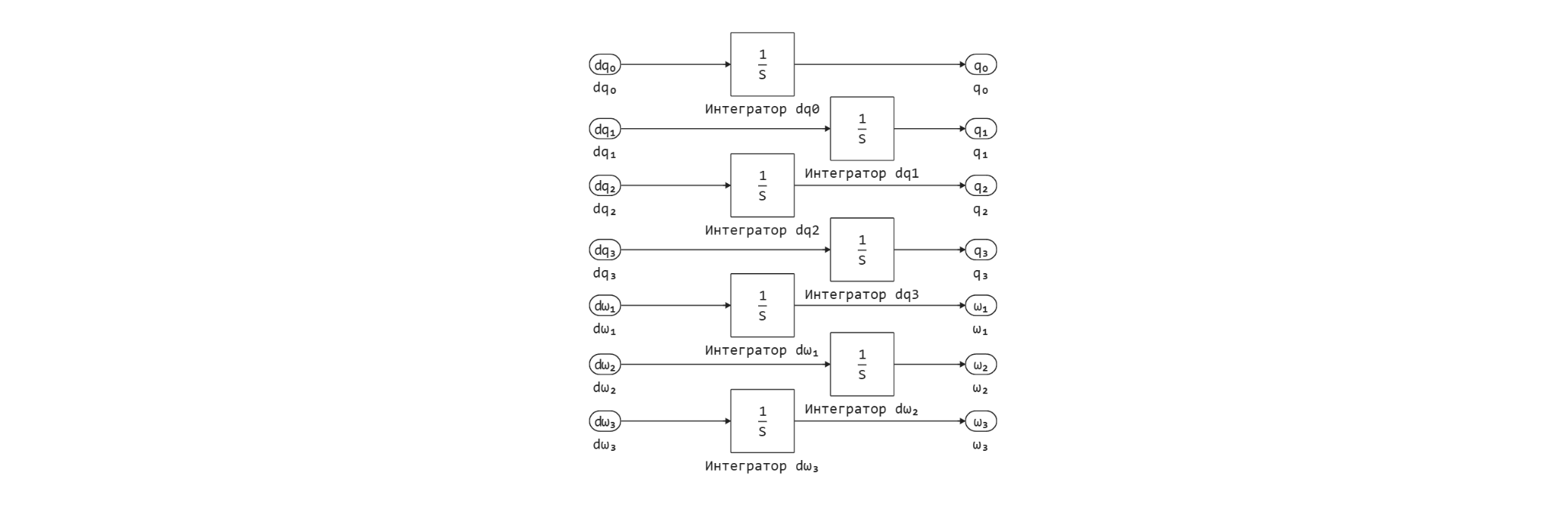
На вход блока подаются состояния интегралы от производных кватернионов и угловых скоростей, рассчитываемые в блоке Интегрирование, имеющим следующее устройство:
.png)
С помощью блоков шин сигналы компонуются для дальнейшего использования. Из Шины 3 сигнал идёт в блок, в котором шина преобразуется в вектор и, затем, подаётся на вход блока Преобразования кватерниона в матрицу поворота.
Определение функции для загрузки и запуска модели:
function start_model_engee()
try
engee.close("dzhanibekov_effect", force=true) # закрытие модели
catch err # в случае, если нет модели, которую нужно закрыть и engee.close() не выполняется, то будет выполнена её загрузка после catch
m = engee.load("$(@__DIR__)/dzhanibekov_effect.engee") # загрузка модели
end;
try
engee.run(m) # запуск модели
catch err # в случае, если модель не загружена и engee.run() не выполняется, то будут выполнены две нижние строки после catch
m = engee.load("$(@__DIR__)/dzhanibekov_effect.engee") # загрузка модели
engee.run(m) # запуск модели
end
end
Запуск симуляции
start_model_engee();
Вывод данных в отдельную переменную:
result = collect(simout["dzhanibekov_effect/Преобразование кватерниона
в матрицу поворота.DCM"]);
Вывод данных в отдельные переменные для их анализа и построения визуализации:
time_ = result[:,1]
R_hist = result[:,2];
Определение функции для создания Т-образной геометрической фигуры:
function create_t_figure()
vertical = [[0, 0], [-0.5, 0.5], [0, 0]]
horizontal = [[-0.6, 0.6], [0.5, 0.5], [0, 0]]
return (vertical, horizontal)
end
Определение функции для создания анимации движения тела:
using Printf
function create_djanibekov_animation_plots(R_hist, time_)
gr()
# Создаем T-образную фигуру
t_figure = create_t_figure()
vertical, horizontal = t_figure
# Функция для преобразования точек с помощью матрицы вращения
function rotate_points(points, R)
x, y, z = points
n = length(x)
rotated = zeros(3, n)
for i in 1:n
rotated[:, i] = R * [x[i], y[i], z[i]]
end
return rotated[1, :], rotated[2, :], rotated[3, :]
end
# Создаем анимацию
anim = @animate for i in 1:40:length(R_hist)
R = R_hist[i]
# Применяем вращение к фигуре
v_rot = rotate_points(vertical, R)
h_rot = rotate_points(horizontal, R)
gr()
# Создаем 3D график
p = plot3d(
v_rot...,
linewidth=3,
linecolor=:red,
label="",
xlim=(-1, 1),
ylim=(-1, 1),
zlim=(-1, 1),
title="Эффект Джанибекова (t = $(@sprintf("%.2f", time_[i])) с)",
xlabel="X",
ylabel="Y",
zlabel="Z",
aspect_ratio=:equal,
camera=(30, 30)
)
plot3d!(
h_rot...,
linewidth=3,
linecolor=:blue,
label=""
)
# Добавляем сферу в центре
scatter3d!([0], [0], [0], markersize=4, markercolor=:gray, label="")
end
# Сохраняем анимацию в GIF
output_path = "djanibekov_effect_plots.gif"
println("Анимация сохранена в файл: ", output_path)
return gif(anim, output_path, fps=25)
end
Создание анимации движения тела и её визуализация:
anim = create_djanibekov_animation_plots(R_hist, time_)
w1 = collect(simout["dzhanibekov_effect/Интегрирование.ω₁"])
w2 = collect(simout["dzhanibekov_effect/Интегрирование.ω₂"])
w3 = collect(simout["dzhanibekov_effect/Интегрирование.ω₃"]);
plotlyjs()
plot(w1[:, 1], w1[:, 2], label="Угловая скорость вокруг оси X", lw=2)
plot!(w2[:, 1], w2[:, 2], label="Угловая скорость вокруг оси Y", lw=2)
plot!(w3[:, 1], w3[:, 2], label="Угловая скорость вокруг оси Z", lw=2)
Переворот можно отследить на графике по смене знака угловой скорости вокруг оси Y, это происходит каждые 4 секунды.
Выводы:
В данном примере была продемонстрирована модель эффекта Джанибекова. Модель можно модифицировать и использовать в различных областях для задач наведения, слежения за целями и для управления ориентацией манипуляторов.