Перестройка центральной частоты при воздействии помех
Перестройка центральной частоты при воздействии помех
В примере рассматривается построение РЛС с возможностью перестройки центральной частоты зондирующего сигнала. Такой подход позволяет побороть воздействие активной помехи в рабочей полосе частот.
Используемые функции
function run_model( name_model, path_to_folder ) # определение функции для прогона модели
Path = path_to_folder * "/" * name_model * ".engee"
if name_model in [m.name for m in engee.get_all_models()] # Проверка условия загрузки модели в ядро
model = engee.open( name_model ) # Открыть модель
model_output = engee.run( model, verbose=true ); # Запустить модель
return nothing
engee.close( name_model, force=true ); # Закрыть модель
else
model = engee.load( Path, force=true ) # Загрузить модель
model_output = engee.run( model, verbose=true ); # Запустить модель
engee.close( name_model, force=true ); # Закрыть модель
end
end
function WA2Data(X)
out = collect(X)
out_data = zeros(eltype(out.value[1]),size(out.value[1],1),size(out.value[1],2),length(out.value))
[out_data[:,:,i] = out.value[i] for i in 1:length(out.value)]
return out_data, out.time
end;
1. Описание модели
В отличие от примера Моностатический радар с несколькими целями в текущей модели обновлены и усовершенствованы следующие функциональные узлы:
- генератор импульсный сигнал с линейной частотной модуляцией, способный перестраиваться с одной центральной частоты на другую;
- Добавлено воздействие помехи в рабочей полосе частот
- Использование широкополосного канала
- Обновление алгоритма обработки сигнала
РЛС работает на частоте 300 МГц с частотой дискретизации 2 МГц. Расположен в точке начала координат и считается неподвижным. Цель находится примерно в 10 км и приближается со скоростью около 100 метров в секунду. Общая структурная схема приведена ниже:

Рассмотрим более детально особенности данной модели:
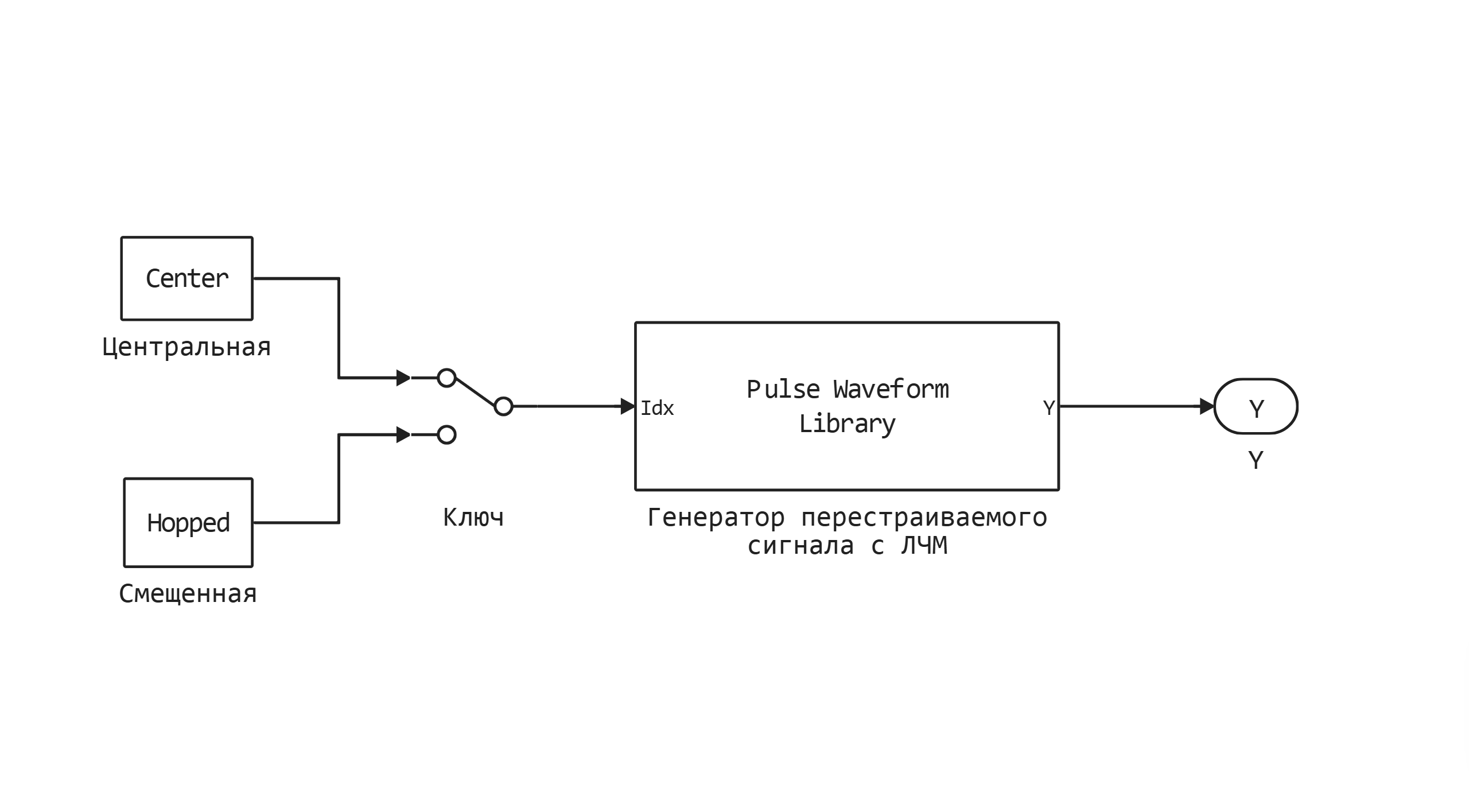
Генератор (Waveform Generation)
Внутри маскированного блока "Waveform Generation" содержится генератор перестраиваемого сигнала с ЛЧМ. С помощью ключа возможно переключаться между центральными частотами 0 и 250 кГц.
Канал и помеха (Channel and Jammer)
- Wideband Free Space: используется широкополосный канал прямого и обратного распространения в свободном пространстве;
- Jammer: модель помехи, имитирующая полезный сигнал на ложной дальности
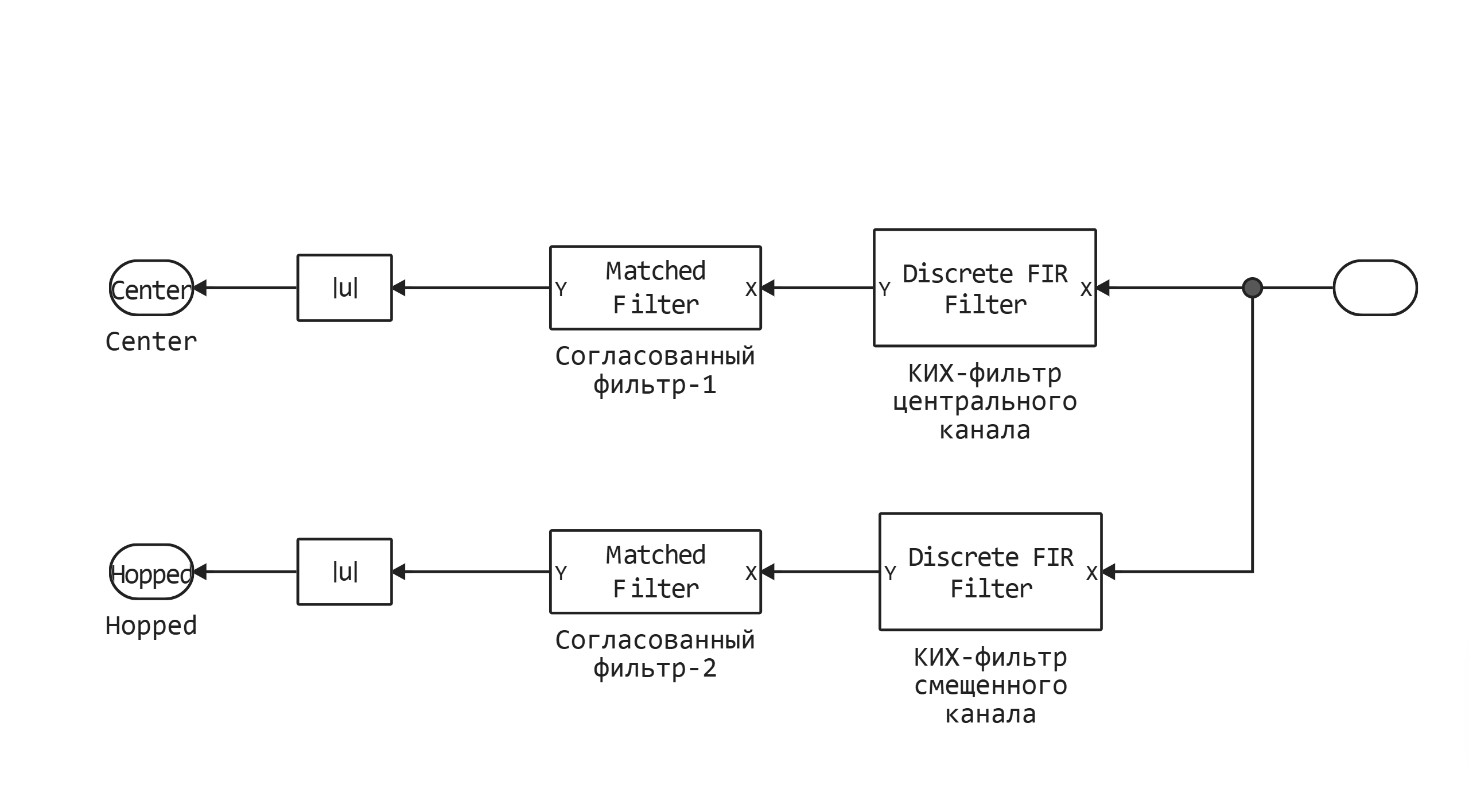
Обработка сигнала (Signal Processing)
После приема сигнала необходимо выделить полезный сигнал по каждому диапазону (в примере их 2) с помощью полосового фильтра (Band Filter), настроенного на соотвествующую центральную полосу. После выделения сигнала идет блок согласованной фильтрации (Matched Filter) для увеличения отношения сигнал/шум (ОСШ):
2. Инициализация входных параметров
Подключим файл инициализации входных параметров "FrequencyAgilityParam.jl"
include("$(@__DIR__)/FrequencyAgilityParam.jl");
Структура jl файла приведена ниже:
фундаментальные параметры:
c = 3e8; # cкорость распространения сигнала
Fs = 2e6 # частота дискретизации
# параметры передатчика
PeakPower = 5000 # мощность передатчика, Вт
TxGain = 20 # Усиление, дБ
TxLossFactor = 0 # потери в передающем тракте, дБ
параметры приемника
NoisePower= 1e-12 # мощность шума, Вт
RxGain = 20 # Усиление приемника, дБ
RxLossFactor = 0 # потери в передающем тракте, дБ
положение радара и помехи
JammerPos = [10_000 ;0;1_000] # начальное положение помехи, м
JammerVel = [100;0;0] # скорость помехи, м/с
RadarPos = [0 ;0;0] # начальное положение радара, м
RadarVel = [0 ;0;0] # скорость радара, м/с
При необходимости параметры файла можно изменять, при этом требуется его повторное подключение.
3. Запуск модели
С помощью функции прогона модели run_model запустим симуляцию модели:
run_model("FrequencyAgility", @__DIR__); # запуск модели
4. Считывание результатов симуляции
С помощью функции WA2Data считаем результаты из переменных Center и Hopped:
Center_engee,_ = WA2Data(Center) # выход центрального канала
Hopped_engee,_ = WA2Data(Hopped); # выход смещенного канала
5. Визуализация результатов
Построим результаты симуляции для последнего импульса по центральному и смещенному каналу:
fig1 = plot(abs.(Center_engee[:,1,end]),label="Центральный канал",color="red",ylabel="Амплитуда, В")
fig2 = plot(abs.(Hopped_engee[:,1,end]), label="Смещенный канал",xlabel="Время, отсчеты",ylabel="Амплитуда, В")
plot(fig1,fig2,layout=(2,1))
На графике центрального видно, что помеха, расположенная на 185 отсчете, подавляет полезный сигнал. В смещенном канале присутствуют только собственные шумы приемника поскольку полезный и помеховый сигналы отфильтровываются КИХ-фильтром.
6. Анализ работы модели
Рассмотрим сценарий работы РЛС: предположим, что в начальный момент времени детектируется цель, спустя некоторое время подключается воздействие помехи и после чего реализуется перестройка по частоте на смещенный канал.
Визуализация работы модели в описанном режиме приведена ниже (файл FrequencyAgility.gif):
В конце записи можно заметить, что перестройка по частоте позволила "разнести" цель и активную помеху по разным каналам.
Заключение
В примере был рассмотрен метод борьбы с активными помехами, попадающими в рабочую полосу частот. С помощью перестройки центральной частоты зондирующего сигнала удалось минимизировать влияние помехи на работу радиолокационной системы.