Поиск оптимальных параметров ОДУ
Поиск оптимальных параметров ОДУ
В данном примере продемонстрирован рабочий процесс поиска оптимальных параметров для обыкновенного дифференциального уравнения (ОДУ), описывающего цепь химических реакций. Мы найдем параметры и оценим, насколько близко они могут воспроизводить истинную динамику системы.
Данная задача решена с помощью рабочего процесса проблемно-ориентированной оптимизации.
В этом примере мы воспользуемся функциями библиотеки JuMP.jl для формулировки оптимизационной задачи, библиотекой нелинейной оптимизации Ipopt.jl, библиотекой для решения дифференциальных уравнений DifferentialEquations.jl и библиотекой Plots.jl для визуализации результатов.
Описание задачи
Рассмотрим модель многоэтапной цепи химических реакций, в которой участвуют несколько веществ . Вещества реагируют друг с другом с определенной скоростью и образуют новые вещества. Подлинная скорость реакций для данной задачи неизвестна. Но мы можем производить наблюдения определенное количество раз за данное время . На основании этих наблюдений мы подберем оптимальные скорости реакций .
В модели есть шесть веществ, от до , которые реагируют следующим образом:
- одно вещество и одно вещество реагируют, образовывая одно вещество со скоростью ;
- одно вещество и одно вещество реагируют, образовывая одно вещество со скоростью ;
- одно вещество и одно вещество реагируют, образовывая одно вещество со скоростью .
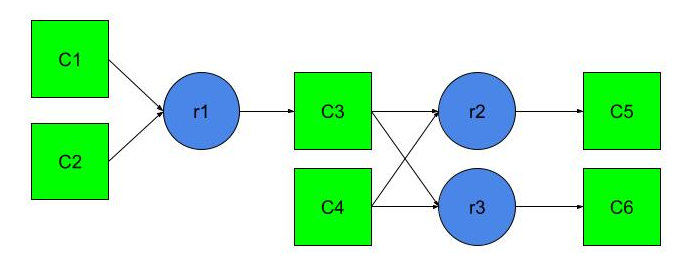
Скорость реакции пропорциональна произведению количеств требуемых веществ. Таким образом, если представляет количество вещества , то скорость реакции для получения равна . Аналогично, скорость реакции для получения равна , а скорость реакции для получения равна .
Таким образом, мы можем составить дифференциальное уравнение, описывающее процесс изменения нашей системы:
Зададим начальные значения . Такие начальные значения гарантируют, что все вещества полностью прореагируют, в результате чего будут приближаться к нулю по мере увеличения времени.
Установка библиотек
Если в вашем окружении не установлена последняя версия пакета JuMP, раскомментируйте и запустите ячейку ниже:
Pkg.add(["Ipopt", "DifferentialEquations", "JuMP"])
#Pkg.add("JuMP");
Для запуска новой версии библиотеки после завершения установки нажмите на кнопку «Личный кабинет»:
 Затем нажмите на кнопку «Стоп»:
Затем нажмите на кнопку «Стоп»:

Перезапустите сессию нажатием кнопки «Старт Engee»:

Подключение библиотек
Подключите библиотеку JuMP:
using JuMP;
Подключите библиотеку нелинейного решателя Ipopt:
using Ipopt;
Подключите библиотеку для решения дифференциальных уравнений DifferentialEquations:
using DifferentialEquations;
Подключите библиотеку построения графиков Plots:
using Plots;
Конфигурация параметров визуализации
Задайте кастомизированный размер графиков и бэкграунд plotly:
plotly(size=(1500, 600), xlims=(0, :auto));
Опишите функцию, определяющую границы для и осей для приближения графиков:
function check_bounds(min::Number, max::Number)
if min > max
error("Значение min должно быть меньше чем значение max")
elseif max < min
error("Значение max должно быть больше чем значение min")
end
end
Решение дифференциальных уравнений
Создайте функцию dif_fun, описывающую ОДУ нашей цепи химических реакций:
function dif_fun(du, u, p, t)
r1, r2, r3 = p
du[1] = -r1 * u[1] * u[2]
du[2] = -r1 * u[1] * u[2]
du[3] = -r2 * u[3] * u[4] + r1 * u[1] * u[2]- r3 * u[3] * u[4]
du[4] = -r2 * u[3] * u[4] - r3 * u[3] * u[4]
du[5] = r2 * u[3] * u[4]
du[6] = r3 * u[3] * u[4]
end
Задайте истинные значения и сохраните их в переменной r_true:
r_true = [2.5, 1.2, 0.45];
Значения , и в переменной r_true являются эталоном, который алгоритм оптимизации должен попытаться воссоздать.
Задайте длительность симуляции реакции и начальные значения для :
t_span = (0.0, 5.0);
y_0 = [1.0, 1.0, 0.0, 1.0, 0.0, 0.0];
Создайте задачу ОДУ с помощью функции ODEProblem:
prob = ODEProblem(dif_fun, y_0, t_span, r_true);
Решите задачу с помощью функции solve. В скобках укажите название решателя и частоту наблюдений в аргументе saveat:
sol_true = solve(prob, Tsit5(), saveat=0.1);
Для решения данной задачи используем решатель Рунге-Кутты Ципураса 5 порядка Tsit5(), который является рекомендованным для большинства нежестких задач.
Выведите полученные результаты истинных решений на графики:
colors = [:red, :blue, :green, :orange, :purple, :brown]
plot(layout=(3,2))
for i in 1:6
plot!(subplot=i, sol_true.t, sol_true[i,:], color=colors[i], title="y($i)", label="Истинное y($i)")
end
display(current())
Решение задачи оптимизации
Опишите целевую функцию obj_fun, рассчитывающую разницу между истинными параметрами , и и рассчитанными значениями.
function obj_fun(r1, r2, r3)
r = [r1, r2, r3]
prob_new = ODEProblem(dif_fun, y_0, t_span, r)
sol_new = solve(prob_new, Tsit5(), saveat=0.1)
return sum(sum((sol_new[i,:] .- sol_true[i,:]).^2) for i in 1:6)
end
Для нахождения оптимальных решений нам нужно будет минимизировать эту функцию.
Создайте оптимизационную задачу с помощью функции Model и укажите название решателя в скобках:
model = Model(Ipopt.Optimizer)
Переведите модель в «молчаливый» режим, чтобы скрыть системные сообщения:
set_silent(model)
Создайте переменную r, содержащую три элемента – , и , и задайте границы от 0.1 до 10:
@variable(model, 0.1 <= r[1:3] <= 10)
Так как мы имеем дело с комплексной пользовательской нелинейной функцией obj_fun, для корректной интеграции в оптимизационную среду библиотеки JuMP её предварительно нужно зарегистрировать с помощью функции register. В скобках укажите количество входящих аргументов (, и ) и включите автоматическую дифференциацию.
register(model, :obj_fun, 3, obj_fun; autodiff = true)
Создайте нелинейную целевую функцию для нахождения минимальных значений , и и примените ранее созданную функцию obj_fun:
@NLobjective(model, Min, obj_fun(r[1], r[2], r[3]))
Решите оптимизационную задачу:
optimize!(model);
Сохраните оптимизированные параметры в переменной:
optimized_params = value.(r)
Выведите результаты решения задачи. Вы можете использовать функцию round и аргумент digits, чтобы скорректировать точность до точности данных истинных параметров.
optimized_params = round.(value.(r), digits=2)
println("Истинные параметры: ", r_true)
println("Оптимизированные параметры: ", optimized_params)
Оптимизация при ограниченных наблюдениях
Смоделируем ситуацию, когда мы не можем наблюдать все компоненты , а только конечные результаты и , и рассчитаем значения скоростей всех реакций на основе данной ограниченной информации.
Опишите целевую функцию obj_fun_lim, являющуюся копией функции obj_fun из предыдущего раздела, но возвращающую только результаты для и .
function obj_fun_lim(r1, r2, r3)
r = [r1, r2, r3]
prob_new = ODEProblem(dif_fun, y_0, t_span, r)
sol_new = solve(prob_new, Tsit5(), saveat=0.1)
return sum(sum((sol_new[i,:] .- sol_true[i,:]).^2) for i in 5:6)
end
Создайте оптимизационную задачу с помощью функции Model и укажите название решателя в скобках:
model_lim = Model(Ipopt.Optimizer)
Переведите модель в «молчаливый» режим, чтобы скрыть системные сообщения:
set_silent(model_lim)
Создайте переменную r, содержащую три элемента – , и , и задайте границы от 0.1 до 10:
@variable(model_lim, 0.1 <= r_lim[1:3] <= 10)
Зарегистрируйте функцию obj_fun_lim с помощью функции register:
register(model_lim, :obj_fun_lim, 3, obj_fun_lim; autodiff = true)
Создайте нелинейную целевую функцию для нахождения минимальных значений , и и примените ранее созданную функцию obj_fun_lim:
@NLobjective(model_lim, Min, obj_fun_lim(r[1], r[2], r[3]))
Решите оптимизационную задачу:
optimize!(model_lim)
Выведите результаты решения задачи. Вы можете использовать функцию round, чтобы округлить избыточно точные значения, если это необходимо.
println("Истинные параметры: ", r_true)
println("Оптимизированные параметры (ограниченные): ", value.(r_lim))
Создайте задачу ОДУ с помощью функции ODEProblem, применив оптимизированные значения r_lim:
prob_opt = ODEProblem(dif_fun, y_0, t_span, value.(r_lim));
Решите задачу ОДУ:
sol_opt = solve(prob_opt, Tsit5(), saveat=0.1);
Визуализируйте результаты для и :
y_min = 0 # @param {type:"slider", min:0, max:1, step:0.01}
y_max = 0.6 # @param {type:"slider", min:0, max:1, step:0.01}
check_bounds(y_min, y_max)
x_min = 0 # @param {type:"slider", min:0, max:5, step:0.1}
x_max = 5 # @param {type:"slider", min:0, max:5, step:0.1}
check_bounds(x_min, x_max)
plot(sol_true.t, [sol_true[5,:] sol_true[6,:]], label=["Истинное y(5)" "Истинное y(6)"], ylimits=(y_min, y_max), xlimits=(x_min, x_max))
plot!(sol_true.t, [sol_opt[5,:] sol_opt[6,:]], label=["Оптимизированное y(5)" "Оптимизированное y(6)"], linestyle=:dash, ylimits=(y_min, y_max), xlimits=(x_min, x_max))
display(current())
Визуализируйте и сравните результаты ранее заданных истинных значений и полученных значений :
true_colors = [:darkred, :darkblue, :darkgreen, :darkorange, :darkviolet, :brown]
opt_colors = [:red, :blue, :green, :orange, :violet, :orange]
plot(layout=(3,2))
for i in 1:6
plot!(subplot=i, sol_true.t, sol_true[i,:], color=true_colors[i], label="Истинное y($i)", title="y($i)")
plot!(subplot=i, sol_opt.t, sol_opt[i,:], color=opt_colors[i], label="Оптимизированное y($i)", linestyle=:dash)
end
display(current())
Мы можем обнаружить, что при новых оптимизированных параметрах, полученных при ограниченных наблюдениях, вещества и расходуются медленнее, а вещество накапливается в меньшей степени. Однако вещества , и имеют абсолютно одинаковую динамику как при найденных, так и при истинных параметрах.
Заключение
В данном примере мы решили задачу по поиску оптимальных параметров ОДУ, описывающего многоэтапную цепь химических реакций, с помощью рабочего процесса проблемно-ориентированной оптимизации. Мы смоделировали ситуацию при условии ограниченных наблюдениях и произвели сравнение динамики системы.