Пример синтеза регуляторов
Пример синтеза регуляторов
Пример из вебинара "Возможности Engee для моделирования Систем управления"
using ControlSystems
Способы соединения систем
W1 = tf(10, [9, 0.04, 0.01]);
W2 = tf(15, [2, 0.01, 0.7]);
Последовательное соединение

W = W1 * W2
W = series(W1, W2)
Параллельное соединение

W = W1 + W2
W = parallel(W1, W2)
Последовательный регулятор
В первом примере воспользуемся частотными характеристиками, чтобы подобрать последовательный регулятор.
Объект управления
s = tf("s")
sys = (1s+2)/(0.2*s^2 +1.2*s+1)
Характеристики Объекта управления
p1 = ControlSystems.marginplot(sys)
p2 = plot(stepinfo(step(feedback(sys),0:0.01:5); settling_th=0.05), legend=:bottomright)
plot(p1, p2, layout = (1, 2))
Требования:
- Отсутствие статической ошибки
- Перерегулирование <15%
- Время переходного процесса <2 с
- Запас по фазе >60°
Регулятор - интегрирующее звено
Система с нулевым порядком астатизма, поэтому для того, чтобы удовлетворить требованию отсутствия статической ошибки, для начала добавим в качестве регулятора интегрирующее звено:
controller = 1/s
p1 = ControlSystems.marginplot(sys*controller)
p2 = plot(stepinfo(step(feedback(sys*controller),0:0.01:10); settling_th=0.05), legend=:bottomright)
plot(p1, p2, layout = (1, 2))
Регулятор - интегрирующее звено + Коэффициент усиления
Система стала точной. Но она довольно медленная, поэтому добавим коэффициент усиления.
k = 5.6 # @param {type:"slider",min:0,max:10,step:0.1}
controller = k*1/s
p1 = ControlSystems.marginplot(sys*controller)
p2 = plot(stepinfo(step(feedback(sys*controller),0:0.01:5); settling_th=0.05), legend=:bottomright)
plot(p1, p2, layout = (1, 2))
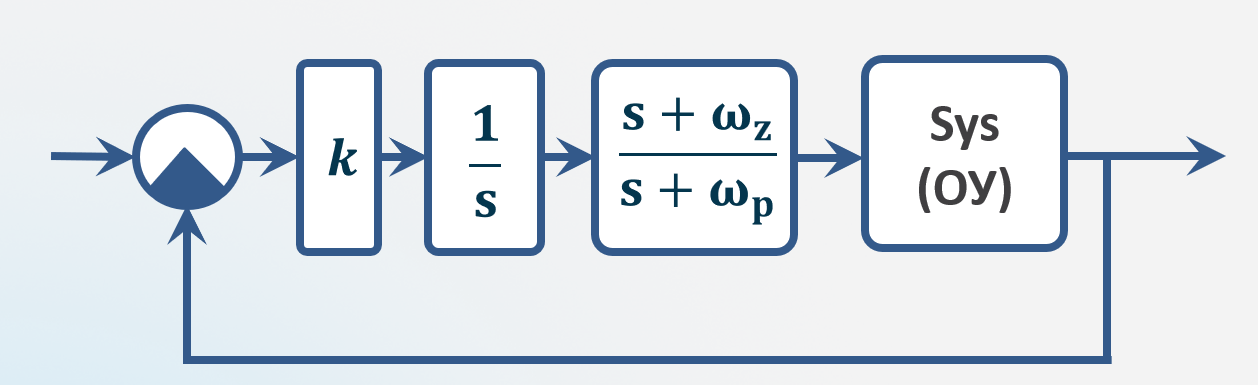
Регулятор - интегрирующее звено + Коэффициент усиления + Последовательное корректирующее устройство с опережением по фазе
Осталось увеличить запас по фазе. Необходимо изменить наклон ЛАЧХ в области средних частот, чтобы повысить устойчивость системы. Для этого добавим последовательное корректирующее устройство с опережением по фазе.
wz = 6.6 # @param {type:"slider",min:1,max:10,step:0.1}
wp = 20.6 # @param {type:"slider",min:1,max:100,step:0.1}
k = 6.8 # @param {type:"slider",min:0,max:10,step:0.1}
controller = k*1/s*(s+wz)/(s+wp)
p1 = ControlSystems.marginplot(sys*controller)
ControlSystems.bodeplot!(sys*k*1/s)
p2 = plot(stepinfo(step(feedback(sys*controller),0:0.01:5); settling_th=0.05), legend=:bottomright)
annotate!(p2, 2, 0.8, text("Регулятор = $k*s*(s + "* string(round(1/wz, digits=3))*")/(s + "*string(round(1/wp, digits=3))*")", :left, 8, :black))
plot(p1, p2, layout = (1, 2))
Получившиеся параметры регулятора можно использовать и в модели, например в блоке Нули и полюса передаточной функции. Вы можете убедиться в этом, изучив модель synthesis.engee.
ПИД-регулятор
using EngeeControlSystems
ПИД-регулятор в параллельной форме
kp = 1.0
ki = 1.0
kd = 1.0
Tf = 0.01
pid_prl = Pid(kp, ki, kd, Tf) # непрерывный ПИД-регулятор с фильтром первого порядка
ПИД-регулятор в стандартной форме
kp = 1.0
ti = 1.0
td = 1.0
n = 100
ts = 0.01
pid_std = PidStd(kp, ti, td, n, ts) # дискретный ПИД-регулятор с фильтром первого порядка
discr = c2d(pid_prl, ts)
d2c(discr)
Ts_new = 0.02
d2d(pid_std, Ts_new)
Автонастройка ПИД-регулятора
pi_c, info = pidtune(sys, :pi, :parallel)
Wzam = feedback(pi_c*sys)
t = 0:0.005:12.0
plot(stepinfo(step(Wzam, t)))
Wraz = pi_c*sys
ControlSystems.marginplot(Wraz)
Результат работы функции pidtune можно использовать в модели, например в параметрах блока ПИД регулятор: Пропорциональный коэффициент: pi_c.kp и Интегральный коэффициент: pi_c.ki. Пример показан в модели synthesis.engee.