Джойстик с датчиком положения для STM32
Джойстик с датчиком положения MPU6050 для STM32F4
В этом демонстрационном примере рассмотрена модель Engee для считывания углов осевого вращения с фильтром Калмана, преобразования полученных углов и передачи ограниченных углов поворота в последовательный порт.
Введение
Проект, базирующийся на модели Engee stm32_mpu6050.engee, выполняет следующие задачи:
- получение по каналу I2C контроллера STM32F446RE ускорения и скорости поворота по трём осям вращения от датчика MPU6050;
- преобразование этих величин в осевые повороты - крен, тангаж, рыскание с фильтрацией фильтром Калмана;
- получение дискретных сигналов "Фиксация", "Переключение масштаба";
- преобразование осевых поворотов в отклонения координат вектора нормали джойстика в декартовой системе координат;
- преобразование отклонений координат в углы поворота джойстика в сферических координатах;
- ограничение полученных углов соответственно;
- вывод переменных: углы , "Фиксация", "Переключение масштаба" в универсальный приемо-передатчик (USART).
Элементы и окружение:
- Отладочная плата: NUCLEO-F446RE
- Микроконтроллер: STM32F446RE
- Входные каналы: I2C, 2 DI
- Выходные каналы: USART (COM)
- Датчик трёхосевого акселерометра-гироскопа: MPU6050 (GY-521)
- Среда разработки: Engee -> VS Code 1.92.1 + PlatformIO 6.1.15
- Framework PlatformIO: stm32duino
Используемый framework PlatformIO - stm32duino использован ввиду наличия готовых отлаженных подключаемых файлов для работы с датчиком MPU6050 и фильтром Калмана для микроконтроллеров Arduino.
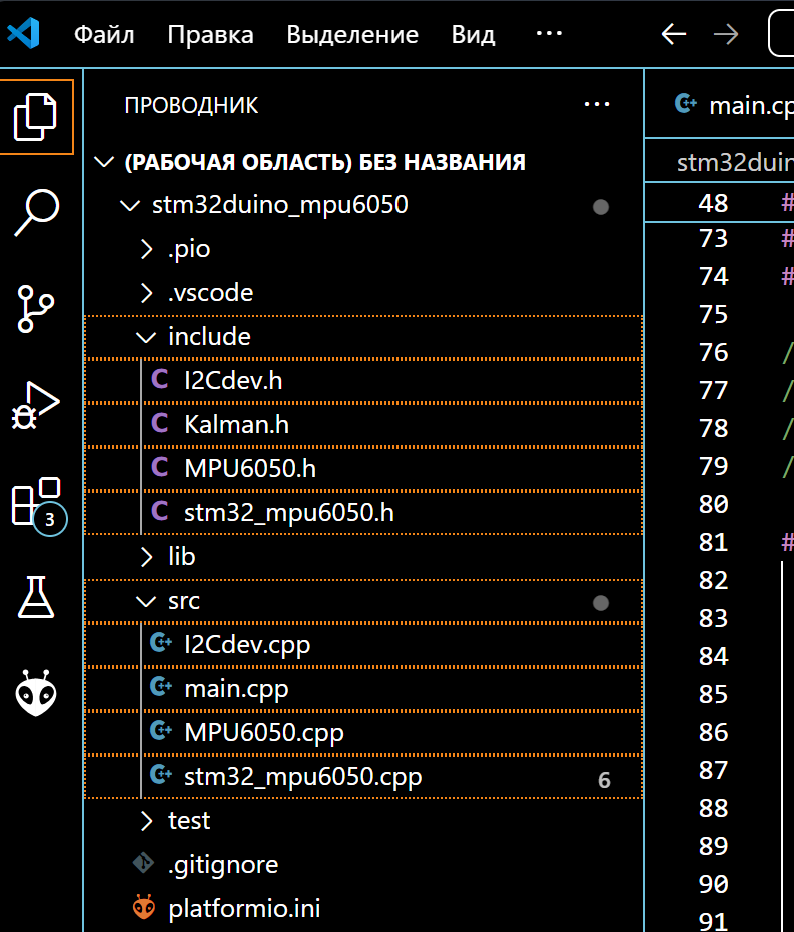
Файлы проекта
Директория проекта в файловом браузере:
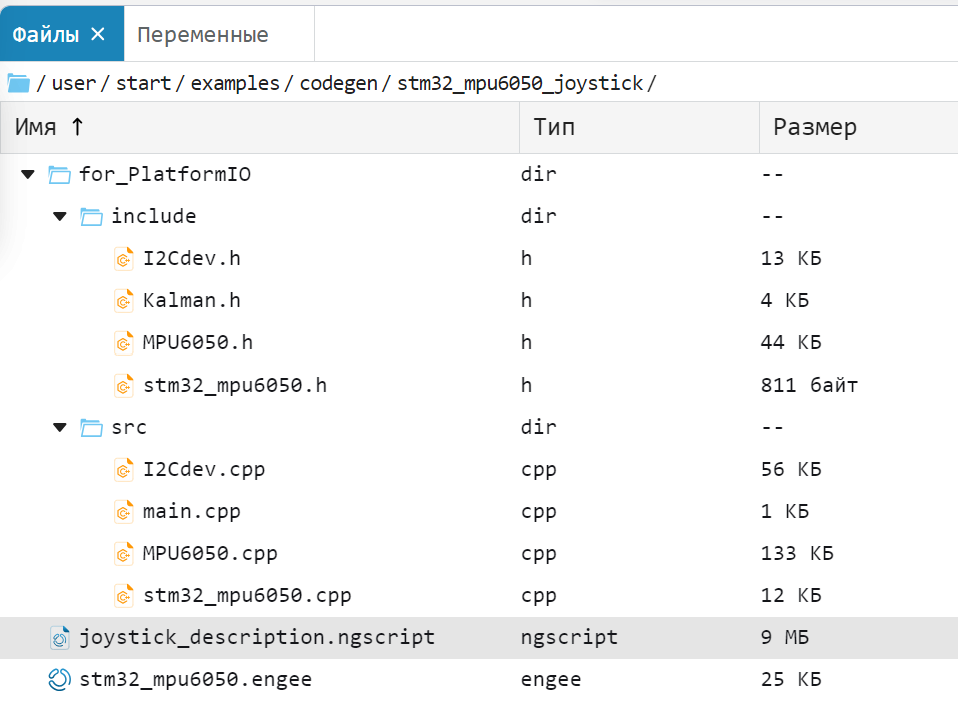
for_PlatformIO- папка с файлами для проекта PlatformIO:-
include- папка с подключаемыми файлами:
-
-
I2Cdev.h- заголовочный файл интерфейса I2C;
-
-
-
Kalman.h- заголовочный файл фильтра Калмана (также подключается в модели!);
-
-
-
MPU6050.h- заголовочный файл датчика MPU6050 (также подключается в модели!);
-
-
-
stm32_mpu6050.h- генерируемый заголовочный файл модели Engee;
-
-
source- папка с исходными файлами С/С++:
-
-
I2Cdev.cpp- исходный файл интерфейса I2C;
-
-
-
main.cpp- файл основной пользовательской программы;
-
-
-
MPU6050.cpp- исходный файл датчика MPU6050;
-
-
-
stm32_mpu6050.cpp- переименованный генерируемый исходный файл модели Engee;
-
joystick_description.ngscript- текущий скрипт Engee;stm32_mpu6050.engee- модель Engee данного проекта.
Добавим пути и имена некоторых файлов и папок для командного управления моделированием, генерацией кода и работой с файлами.
Pkg.add(["FilePathsBase"])
имя_модели = "stm32_mpu6050";
папка_проекта = "$(@__DIR__)/";
путь_модели = папка_проекта * имя_модели * ".engee";
путь_генератора_кода = папка_проекта * "model_code/";
путь_platformIO_CPP = папка_проекта * "for_PlatformIO/src/";
путь_platformIO_H = папка_проекта * "for_PlatformIO/include/";
Описание модели
Модель stm32_mpu6050.engee данного проекта можно разбить на следующие функциональные группы блоков:
- блоки преобразования углов осевых поворотов,
- блоки взаимодействия с периферией микроконтроллера.
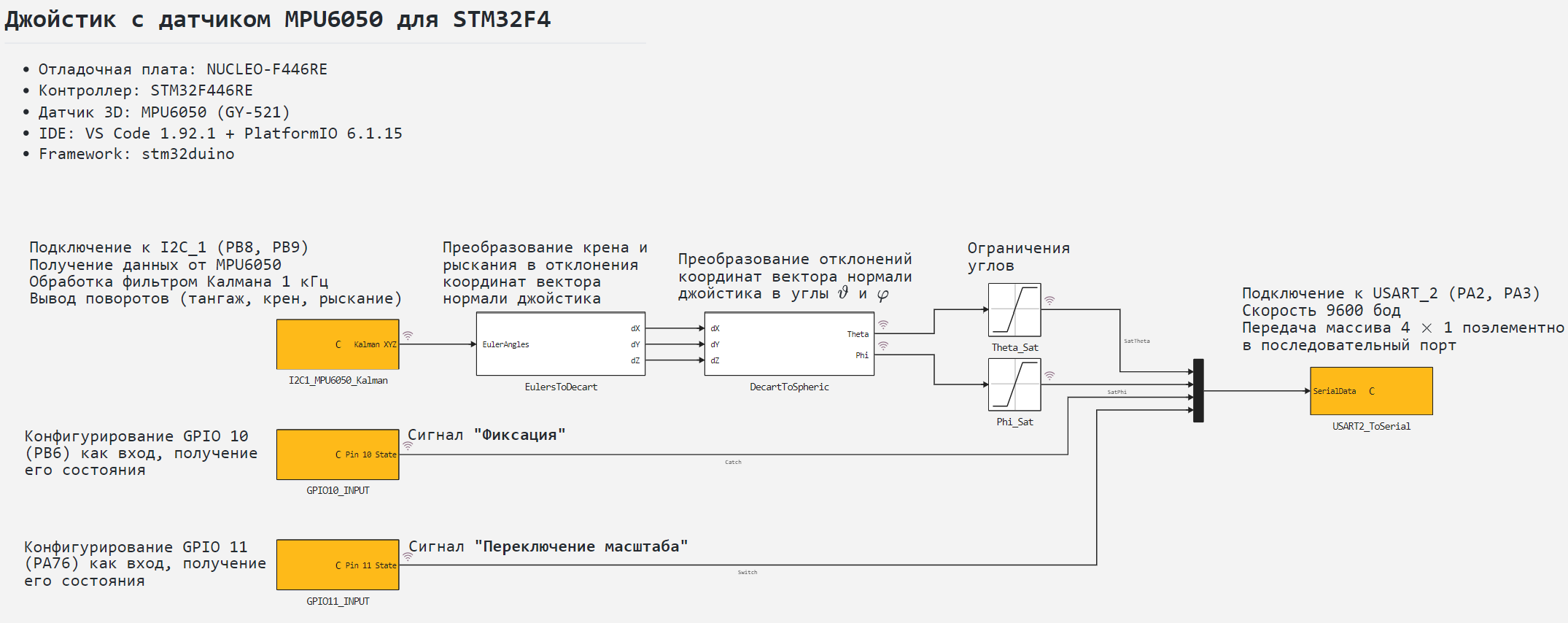
Вычисления, реализуемые подсистемой EulersToDecart выполняют преобразования значений углов поворота по осям, полученных фильтром Калмана, в отклонения в декартовых координатах вектора нормали джойстика, исходящего из начала координат:
Подсистема DecartToSpheric по-сути, выполняет обратные преобразования:
После преобразования полученных сигналов в углы поворота джойстика осуществляется их ограничение в соответствии с заданными диапазонами.
Блоки периферии
В модели проекта содержатся 4 блока периферии микроконтроллера, реализуемые при помощи блоков C Function:
I2C1_MPU6050_Kalman- для инициализации интерфейса I2C_1, получения данных от MPU6050 и фильтрации углов по осям вращения;GPIO10_INPUT- для инициализации контакта PB6 в качестве дискретного входа, получения его состояния;GPIO11_INPUT- для инициализации контакта PA7 в качестве дискретного входа, получения его состояния;USART2_ToSerial- для инициализации интерфейса USART_2 и передачи по последовательному порту на скорости 9600 бод, выдачи массива значений в последовательный порт.
Для подключения в файлах результатов генерации кода готового кода для I2C, MPU6050 и фильтра Калмана, эти файлы и путь к ним указаны в блоке C_Function "I2C1_MPU6050_Kalman":
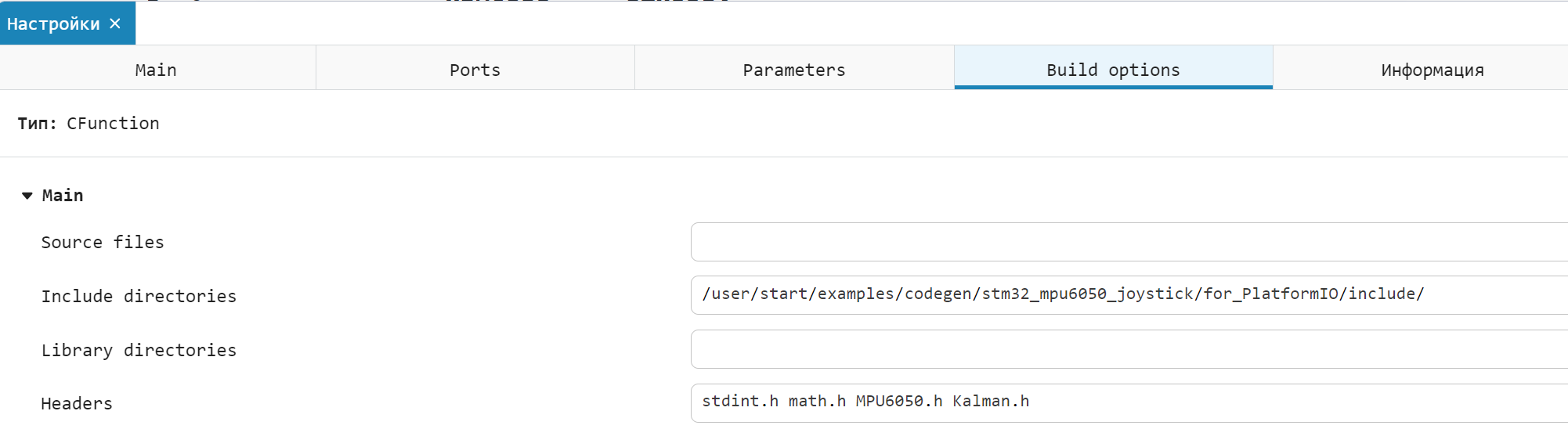
Также блок C Function "I2C1_MPU6050_Kalman" формирует изменение углов вращения датчика вокруг осей Y и Z в процессе моделирования.
Подробное описание работы кода из блоков C Function дано в его комментариях.
Результаты работы модели
Для моделирования преобразования значений углов вращения загрузим и запустим модель stm32_mpu6050.engee:
if имя_модели in [m.name for m in engee.get_all_models()]
m = engee.open(имя_модели);
else
m = engee.load(путь_модели);
end
данные = engee.run(m);
Из полученных данных моделирования извлечём переменные для построения сигналов:
KalmanY- смоделированный угол поворота вокруг оси Y,KalmanZ- смоделированный угол поворота вокруг оси Z,SatTheta- рассчитанный угол ,SatPhi- рассчитанный угол .
# из данных модели извлекаем переменные для построения
KalmanY = Base.stack(данные["KalmanXYZ"].value, dims = 1)[:, 2];
KalmanZ = Base.stack(данные["KalmanXYZ"].value, dims = 1)[:, 3];
SatTheta = данные["SatTheta"].value;
SatPhi = данные["SatPhi"].value;
using Plots;
gr();
plot(
plot(данные["KalmanXYZ"].time, [KalmanY, KalmanZ];
label=["Вращение по Y, рад" "Вращение по Z, рад"], lw=1, legend=:bottomright),
plot(данные["SatTheta"].time, [SatTheta, SatPhi];
label=["Угол ϑ, рад" "Угол φ, рад"], lw=1, legend=:bottomright);
layout=(1,2), size=(900,300)
)
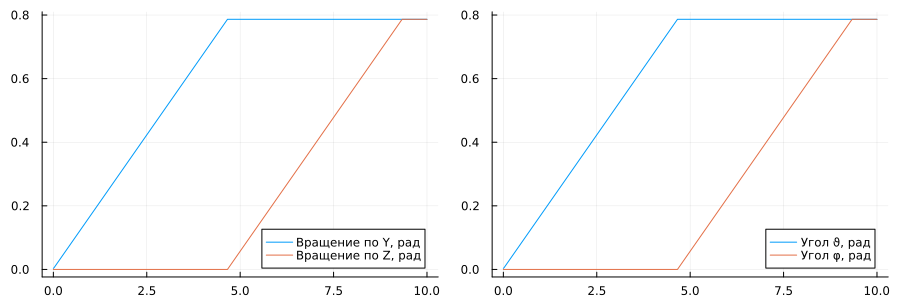
Как видно из графиков, сформированные блоком C Function "I2C1_MPU6050_Kalman" углы поворота датчика вокруг осей Y и Z преобразуются в углы без изменения значений.
Генерация кода
Сгенерируем код из модели для последующей загрузки управляющего алгоритма в микроконтроллер.
engee.generate_code(путь_модели, путь_генератора_кода); # генерация кода из модели
Так как проект в IDE VS Code + PlatformIO далее будет собираться из файлов C++, необходимо для успешной сборки изменить расширение .c сгенерированного файла на .cpp. Для начала перейдём в папку сгенерированных файлов и просмотрим её содержимое:
cd(путь_генератора_кода); # переход в директорию
readdir() # вывод содержимого директории
Здесь: stm32_mpu6050.c - файл Си, сгенерированный кодом из предыдущей ячейки скрипта. Изменим расширение нового сгенерированного файла Си. Для перезаписи файла с существующим названием применим атрибут force = true. После чего снова выведем содержимое папки с результатами генерации кода.
mv(имя_модели * ".c", имя_модели * ".cpp"; force=true); # изменение расширения сгенерированного файла
readdir() # вывод содержимого директории
Расширение нового сгенерированного файла Си изменено, перед добавлением файлов проекта в IDE осталось перенести полученыне файлы в папки src и include для проекта PlatformIO. Для этого удобно воспользоваться библиотекой FilePathsBase.jl
## При необходимости раскомментируйте ячейку для скачивания и установки библиотеки
# import Pkg;
# Pkg.add("FilePathsBase")
using FilePathsBase
# переносим файлы по папкам для проекта PlatformIO
mv(AbstractPath(имя_модели * ".cpp"),
AbstractPath(путь_platformIO_CPP * имя_модели * ".cpp");
force = true);
mv(AbstractPath(имя_модели * ".h"),
AbstractPath(путь_platformIO_H * имя_модели * ".h");
force = true);
Сгенерированный main.c использоваться в проекте не будет, можно удалить файл и его директорию:
cd("..") # переходим на уровень выше в файловой браузере
rm(путь_генератора_кода; recursive=true) # удаляем папку и main.c
Теперь можно перейти к настройке аппаратной части и работой с IDE.
Аппаратная часть
Аппаратная часть проекта, состоящая из указанных ранее элементов, имеет следующую схему соединений: Датчик MPU6050 подключен к интерфейсу I2C_1 на отладочной плате NUCLEO F446RE, кнопочные контакты для подачи дискретных сигналов - к пинам GPIO10 и GPIO11.
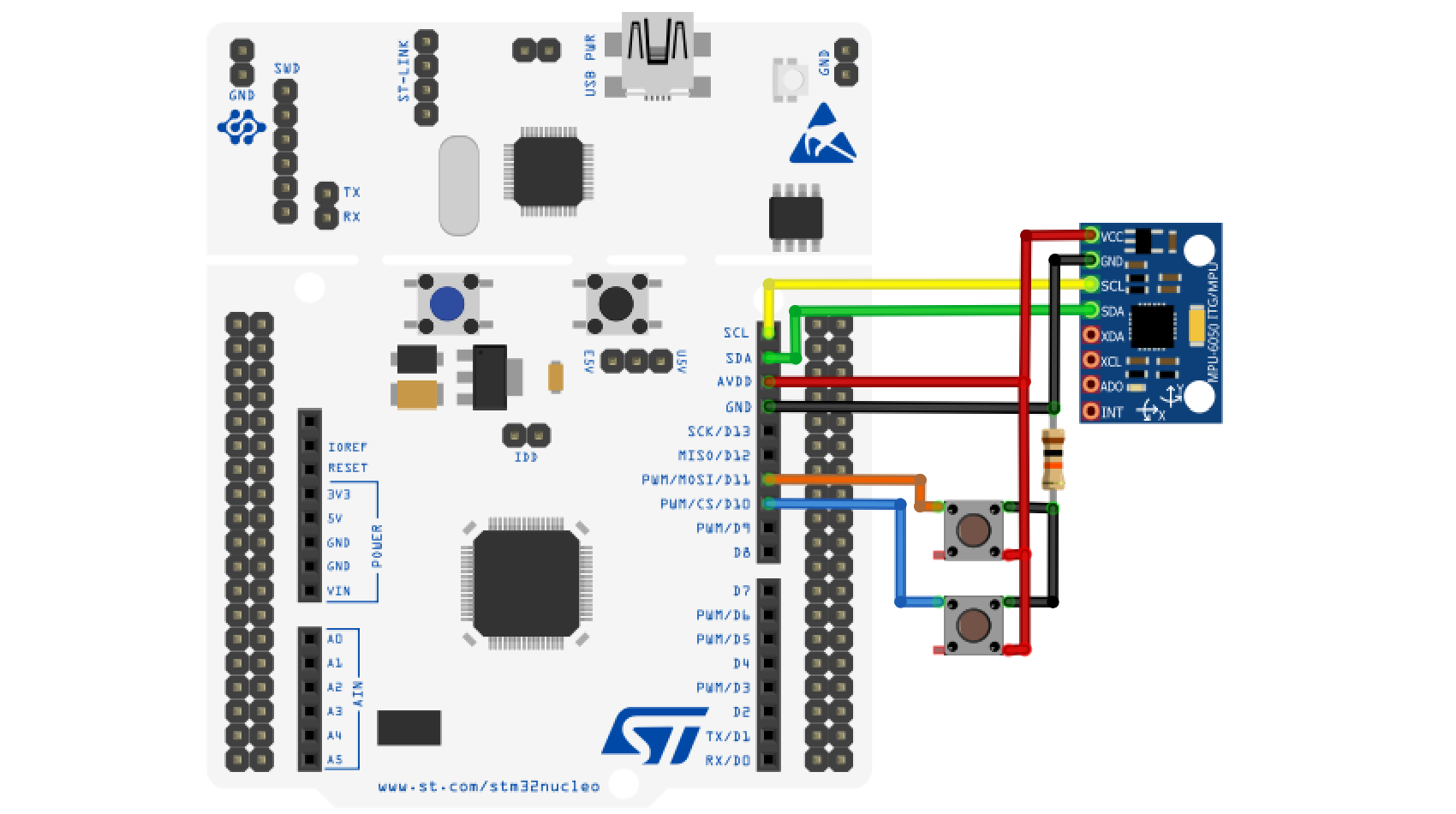
Программирование контроллера и считывание данных, поступающих по интерфейсу USART, осуществляется через USB.
Сборка проекта
Создадим проект в рабочей области среды разработки VSCode+PlatformIO со следующими настройками файла конфигурации platformio.ini:
[env:nucleo_f446re]
platform = ststm32
board = nucleo_f446re
framework = arduino
В директории include и src добавим файлы из соответствующих директорий из браузера файлов Engee текущего проекта.
После этого запустим сборку проекта "Build" и убедимся в успешности сборки:

Выполнение кода на STM32F4
Подключим контроллер STM32F4 c периферией из датчика и двух кнопочных контактов к последовательному порту, после чего запустим загрузку "Upload" скомпилированного кода проекта в контроллер и убедимся в успешности загрузки:
.png)
В последовательный порт компьютера передаются значения переменных углов наклона нормали джойстика и сигналов фиксации и переключения масштаба:
Для отображения графиков сигналов из последовательного порта в этом проекте используется программа SerialPlot.
Заключение
В этом демонстрационном примере была разработана модель Engee для преобразования углов вращения датчика положения MPU6050 вокруг осей. Сгенерированный из модели код после загрузки в микроконтроллер STM32F446RE воспроизводит заложенные функции.
В документации Engee можно получить дополнительную справку, которая поможет при работе с данным проектом:
- концепция Модельно-ориентированного проектирования;
- генератор кода Engee;
- работа с блоком C Function;
- программное управление симуляцией модели.