Внешнее оборудование - Logitech G29: гидроусилитель руля
Контроллер руля Logitech G29 в качестве источника сигналов для модели гидроусилителя
В этом примере мы продолжаем рассматривать работу в Engee модели гидроусилителя руля. На очередном этапе мы качественно переходим на новый уровень модельно-ориентированной разработки: вместо идеализированных исходных данных - сигналов угла поворота мы используем данные, поступающие от человеко-машинного интерфейса (контроллера руля) в режиме псевдореального времени.
Введение
Гидроусилитель руля (ГУР) преобразует усилие водителя в гидравлическое давление, облегчая поворот колес. Применяется в автомобилях для комфорта и снижения нагрузки на водителя. Кроме того, что ГУР уменьшает физическое усилие при повороте руля, эта система также повышает точность и плавность управления.
На первом этапе разработки и отладки модели ГУР в Engee мы воссоздали контуры передачи механических и гидравлических воздействий, исследовали работу модели с включенным и отключенным ГУР с использованием идеализированных входных значений. На текущем этапе разработке при помощи подключения внешнего оборудования в Engee мы используем данные, поступающие от человеко-машинного интерфейса (контроллера руля).
Подготовка к работе
Перед запуском модели в Engee необходимо выполнить несколько подготавливающих действий, как это описано в руководстве.
Кроме того, аналогичные шаги для подготовки можно найти в примере работы с COM-портом. После успешного подключения к Engee можно перейти к подключению оборудования.
Подключение оборудования
Контроллер гоночного руля Logitech G29 подключается напрямую к компьютеру и идентифицируется системой. Для большинства современных операционных систем он определяется и устанавливается автоматически.

Если устройство успешно подключено, можно перейти к запуску модели примера.
Модель примера
Принципы работы исходной модели описаны в примере.
Модель текущего примера - logitech_g29_power_steering.engee. В отличие от исходной, она получает реальные значения угла поворота рулевого колеса (переменная steering) и включения/отключения ГУР (переменная button_enter). Их источником служит блок Logitech G29 Wheel из раздела Оборудование -> Wheel библиотеки блоков Engee.
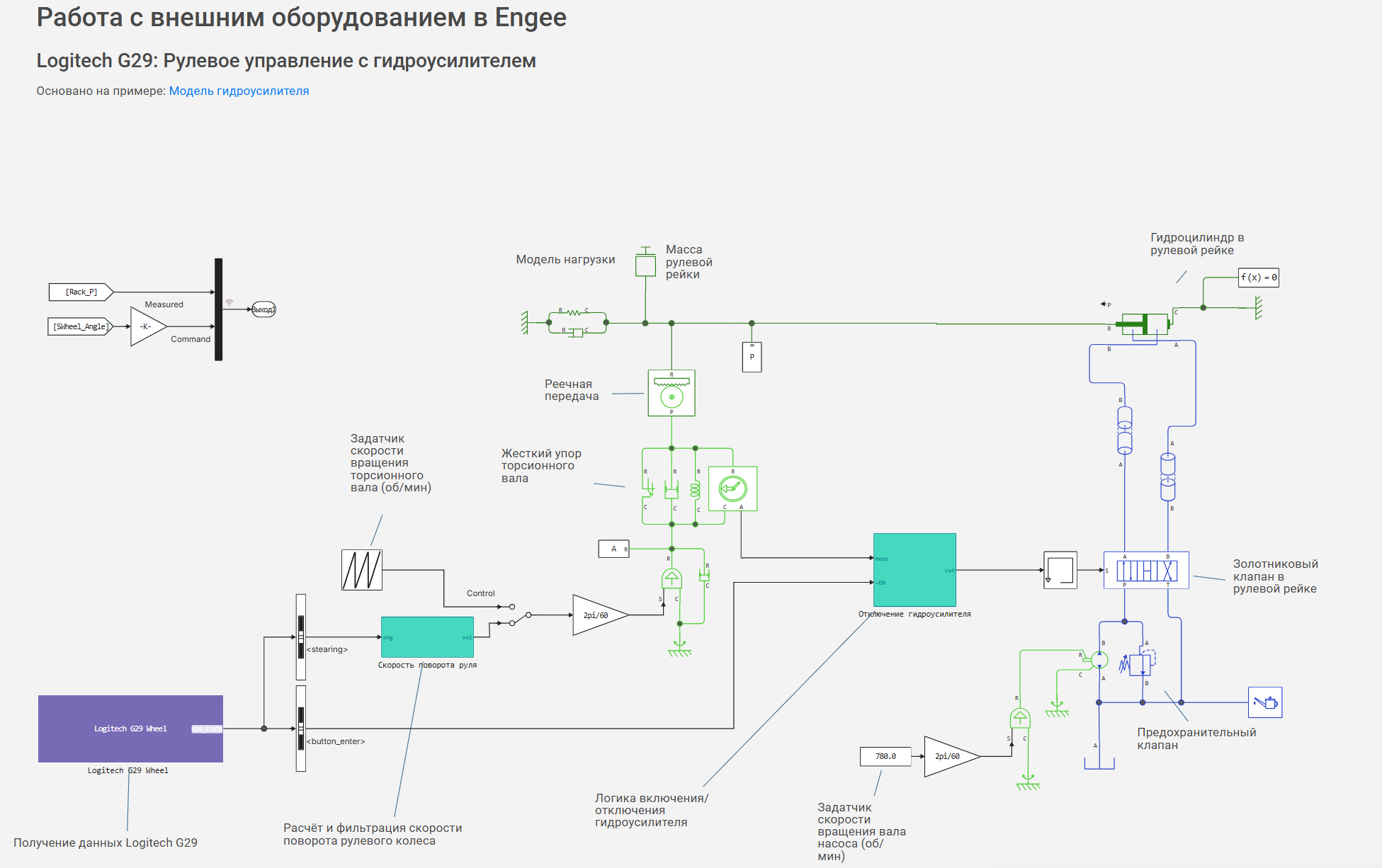
Для обработки поступающих сигналов используются дополнительные подсистемы:
- "Скорость поворота руля" - из сигнала угла поворота руля рассчитывается и фильтруется значение скорости его вращения, как это требуется для исходной модели. Тип фильтра - непрерывный, нижних частот 1-го порядка с постоянной времени .
- "Отключение гидроусилителя" - по активному сигналу нажатия на кнопку "Enter" на руле переключает значение коэффициента усилителя обратной связи ГУР - с определённого ранее значения на "0". Это и способствует отключению ГУР. Для стабильности работы модели эта обратная связь также снабжена фильтром, аналогичным предыдущей подсистемы, но с .
Модель выполняется в режиме псевдореального времени - мы управляем скоростью симуляции модели с коэффициентом 1.0 при помощи соответствующей настройки. Такая настройка имитирует работу модели в реальном времени. Для тестирования модели в режиме жёсткого реального времени следует воспользоваться стендом реального времени на базе комплекса полунатурного моделирования КПМ РИТМ
Результаты моделирования
После запуска модели и изменения поворота контроллера руля можно наблюдать изменение угла поворота колес автомобиля (синий график) аналогичное заданному на контроллере G29 (красный график). При нажатии на кнопку "Enter" можно наблюдать, как угол поворота колёс начинает запаздывать относительно заданного поворота. Это свидетельствует об отключении ГУР в процессе моделирования.
Для дальнейшего развития модели можно добавить дополнительные каналы регулирования - например для частоты вращения насоса ГУР и регулирования давления жидкости.
Заключение
В этом примере мы доработали модель ГУР - подключили реальное оборудование для передачи угла поворота колёс непосредственно от оператора. Кроме того, подключение оборудования позволяет регулировать не только входные значения, но и параметры, и структуру объекта управления - включением и отключением ГУР, регулированием давления рабочей жидкости. На следующем этапе можно переходить к тестированию ГУР в режиме жёсткого реального времени.