Автономная гибридная электростанция: ДГУ + СЭС + СНЭ
Автономная гибридная электростанция: дизель + солнце + накопитель
В этом примере показана модель автономной дизель-солнечной электростанции с системой накопления энергии (СНЭ) на базе суперконденсаторов. Модель служит для:
- Проверки алгоритма управления СНЭ
- Выбора параметров солнечной электростанции
- Выбора мощности, энергоемкости, типа накопителей СНЭ
- Расчета экономической эффективности от экономии топлива
- Выбора оптимального количества агрегатов и размера установленной мощности ДГУ
Введение
Цифровое моделирование играет ключевую роль при разработке и апробации алгоритмов управления СНЭ, позволяя исследовать режимы работы энергосистем и оценивать влияние накопителей на устойчивость и экономичность без проведения натурных экспериментов.
Одним из перспективных направлений применения СНЭ являются автономные гибридные энергоустановки (АГЭУ), широко используемые для электроснабжения удалённых объектов, в том числе нефтегазодобывающих предприятий. Для таких энергосистем характерны отсутствие связи с ЕЭС, резкопеременный характер нагрузки, а также повышенные требования к надёжности электроснабжения.
При проектировании АГЭУ мощность ДГУ, как правило, выбирается по максимуму нагрузки, в результате чего коэффициент использования установленной мощности (КИУМ) оказывается низким. Это приводит к работе дизельных установок в неэкономичных режимах, сопровождающихся повышенным расходом топлива, ускоренным износом оборудования, срабатыванием технологических защит и ухудшением качества электроэнергии. Кроме того, для обеспечения надежности электроснабжения часто требуется завышение установленной мощности генерирующих агрегатов, что снижает экономическую эффективность АГЭУ.
Применение СНЭ в составе АГЭУ позволяет сглаживать резкие изменения нагрузки, повышать качество регулирования частоты и напряжения, обеспечивать работу генераторов вблизи экономичных режимов и снижать требования к установленной мощности традиционных источников. В связи с этим разработка и исследование демо-модели АГЭУ со СНЭ с использованием цифрового моделирования является актуальной задачей для обоснования алгоритмов управления и параметров системы.
Описание модели
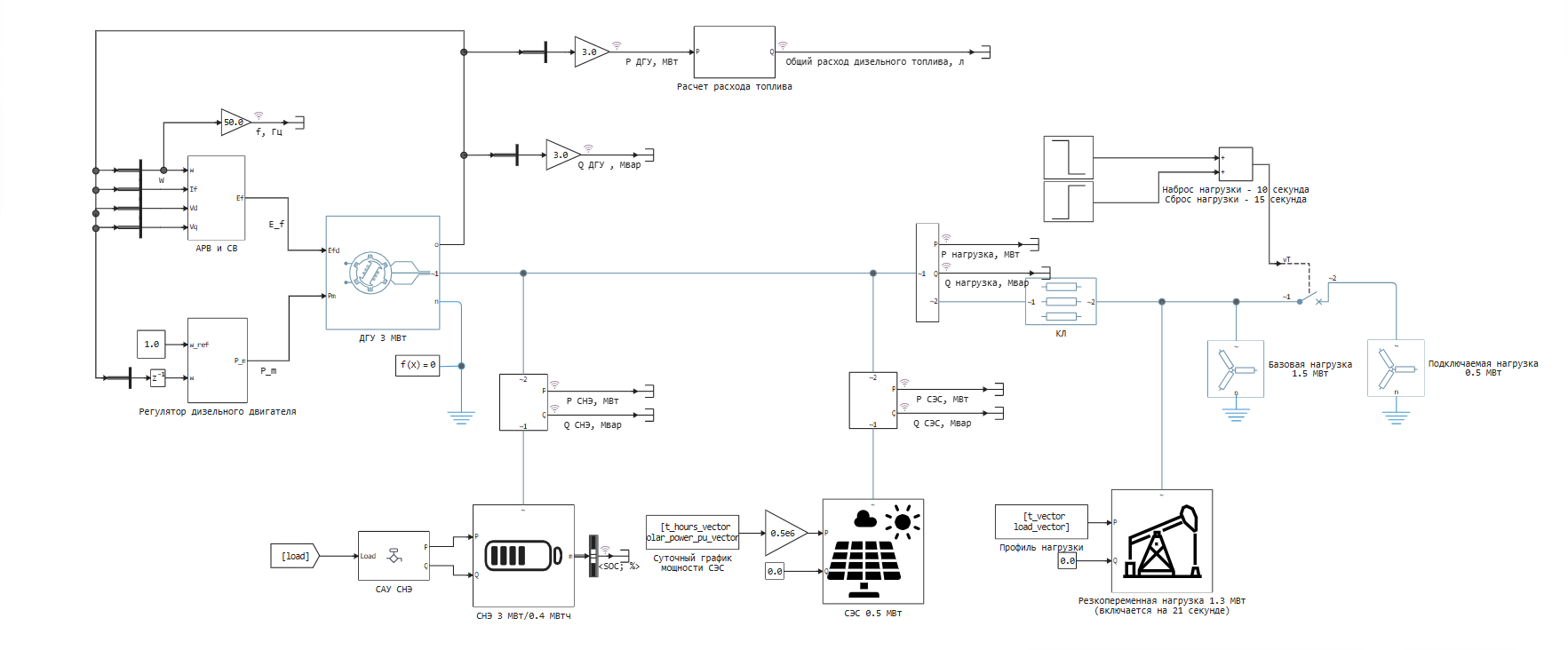
В состав модели напряжением 10,5 кВ входят:
· Дизель-генераторная установки (ДГУ) c АРВ СД и АРС мощностью 3 МВт;
· Солнечная электростанция (СЭС) мощностью 0,5 МВт, без регуляторов;
· СНЭ мощностью 3 МВт и энергоемкостью 400 кВт·ч с алгоритмом сглаживания скачков мощности нагрузки;
· Кабельная линия для связи генерирующего оборудования и нагрузки;
· Нагрузка мощностью 3,3 МВт (базовая мощность – 1,5 МВт, переменная – 0,5 МВт, резкопеременная –1.3 МВт).
Экспорт файлов для модели
Для работы модели экспортируем из файловой системы необходимые зависимости:
using JLD2
@load "load_profile.jld2"; #график резкопеременной нагрузки, Вт(с)
@load "charging_curve.jld2"; #зависимость располагаемой мощности суперкондесатора от заряда, Вт(%)
@load "fuel_consumption_curve.jld2"; #зависимость расхода топлива от нагрузки л/ч(МВт)
@load "specific_fuel_consumption.jld2"; #зависимость удельного расхода топлива от нагрузки к*кВт·ч(о.е.)
@load "solar_profile_pu.jld2"; #суточный график мощности СЭС, о.е.(с)
Графики экспортированных зависимостей
using Plots
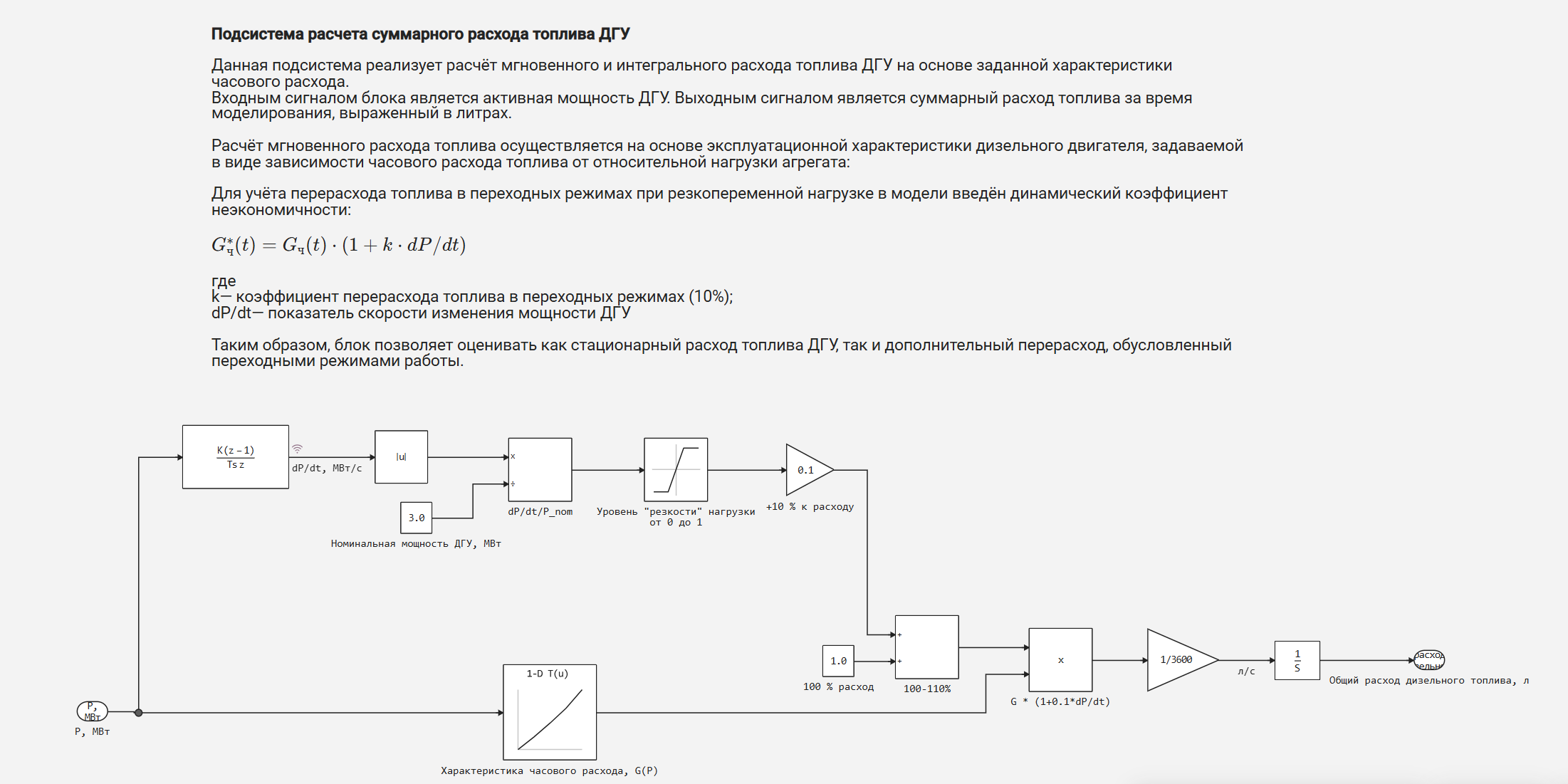
Часовой расход топлива ДГУ. Данная зависимость используется в модели для расчета текущего расхода топлива и общего количества топлива затраченного за всю длительность симуляции.
plot(procent_of_load_vector, G_vector,
linewidth=2,
linecolor=:black,
marker=:circle,
markersize=5,
markercolor=:white,
markerstrokecolor=:black,
markerstrokewidth=1,
xlabel="Нагрузка, %",
ylabel="Расход, л/ч",
grid=true,
gridalpha=0.2,
gridstyle=:dash,
framestyle=:box,
size=(800, 400),
dpi=150,
legend=false,
background_color=:white
)
Фрагмент нагрузочной диаграммы подъемно-транспортного механизма. Используется в модели для задания профиля резкопеременной нагрузки.
plot( t_vector[1:5000], load_vector[1:5000]./1e6,
linewidth=2,
linecolor=:black,
#marker=:circle,
markersize=5,
markercolor=:white,
markerstrokecolor=:black,
markerstrokewidth=1,
xlabel="Время, с",
ylabel="Нагрузка, МВт",
grid=true,
gridalpha=0.2,
#gridstyle=:dash,
framestyle=:box,
size=(800, 400),
dpi=150,
legend=false,
background_color=:white,
)
hline!([0.33], #среднее значение мощности
linecolor=:red,
linewidth=2,
linestyle=:dash,
)
Среднее значение мощности резкопеременной нагрузки:
average_power = sum(load_vector) / length(load_vector)/1e6
Максимальное значение мощности резкопеременной нагрузки:
max_power=maximum(load_vector)/1e6
Зависимость удельного расхода топлива от нагрузки для ДГУ мощностью 3 МВт. График наглядно показывает, что при низкой нагрузке для выработки 1 кВт·ч электроэнергии требуется значительно больше топлива. Данная зависимость не используется в модели, но демонстрирует проблему изолированных энергосистем, где чаще всего генерирующие агрегаты работают при низкой загрузке от 10 до 40% (как рассчитано ранее, средняя нагрузка профиля подъемно-транспортного механизма всего 0,33 МВт, при максимальном значении в 1,3 МВт)
plot(procent_of_load_vector, g_vector,
linewidth=2,
linecolor=:black,
marker=:circle,
markersize=5,
markercolor=:white,
markerstrokecolor=:black,
markerstrokewidth=1,
xlabel="Нагрузка, %",
ylabel="Расход, г/кВт·ч",
grid=true,
gridalpha=0.2,
gridstyle=:dash,
framestyle=:box,
size=(800, 400),
dpi=150,
legend=false,
background_color=:white
)
# Заштрихованная зона до 50 % нагрузки
vspan!(0, 50, fillalpha=0.08, linealpha=0)
# Вертикальная граница 50 %
vline!([50], linestyle=:dash, linewidth=1)
# Текстовая аннотация
annotate!(25, maximum(g_vector)*0.95, text("Зона повышенного\nудельного расхода\nтоплива", 9, :black))
annotate!(52, minimum(g_vector)*1.05, text("", 8, :black))
Располагаемая мощность суперконденсаторов в зависимости от заряда. Кривая задается в модели СНЭ для имитации характеристики реального накопителя. Эту кривую можно получить в отдельной вспомогательной модели Engee в ходе симуляции, подавая напряжение на блоки суперкондесатора, литий-ионной батареи и на другие доступные типы накопителей из библиотеки. В этом примере процесс получения кривой не рассматривается и экспортируется в виде готово файла.
plot(SOC_vector./1e6, P_vector./1e6,
linewidth=2,
linecolor=:black,
markercolor=:white,
markerstrokecolor=:black,
markerstrokewidth=1,
xlabel="Заряд, %",
ylabel="Располагаемая мощность СК, МВт",
grid=true,
gridalpha=0.2,
gridstyle=:dash,
framestyle=:box,
size=(800, 400),
dpi=150,
legend=false,
background_color=:white
)
Из этой зависимости следует, что располагаемая мощность меняется нелинейно. Отсюда можно задать минимальный и максимальный заряд СНЭ от 10 до 90%.
Суточный график мощности СЭС.
plot(t_hours_vector./3600, solar_power_pu_vector,
linewidth=2,
linecolor=:black,
marker=:circle,
markersize=5,
markercolor=:white,
markerstrokecolor=:black,
markerstrokewidth=1,
xlabel="Время, ч",
ylabel="Мощность СЭС, о.е.",
grid=true,
gridalpha=0.2,
gridstyle=:dash,
framestyle=:box,
size=(800, 400),
dpi=150,
legend=false,
background_color=:white
)
Описание модели ДГУ
Модель ДГУ представлена в виде генератора в фазных координатах, модели дизельного двигателя с регулятором скорости, АРВ-М и возбудителя:
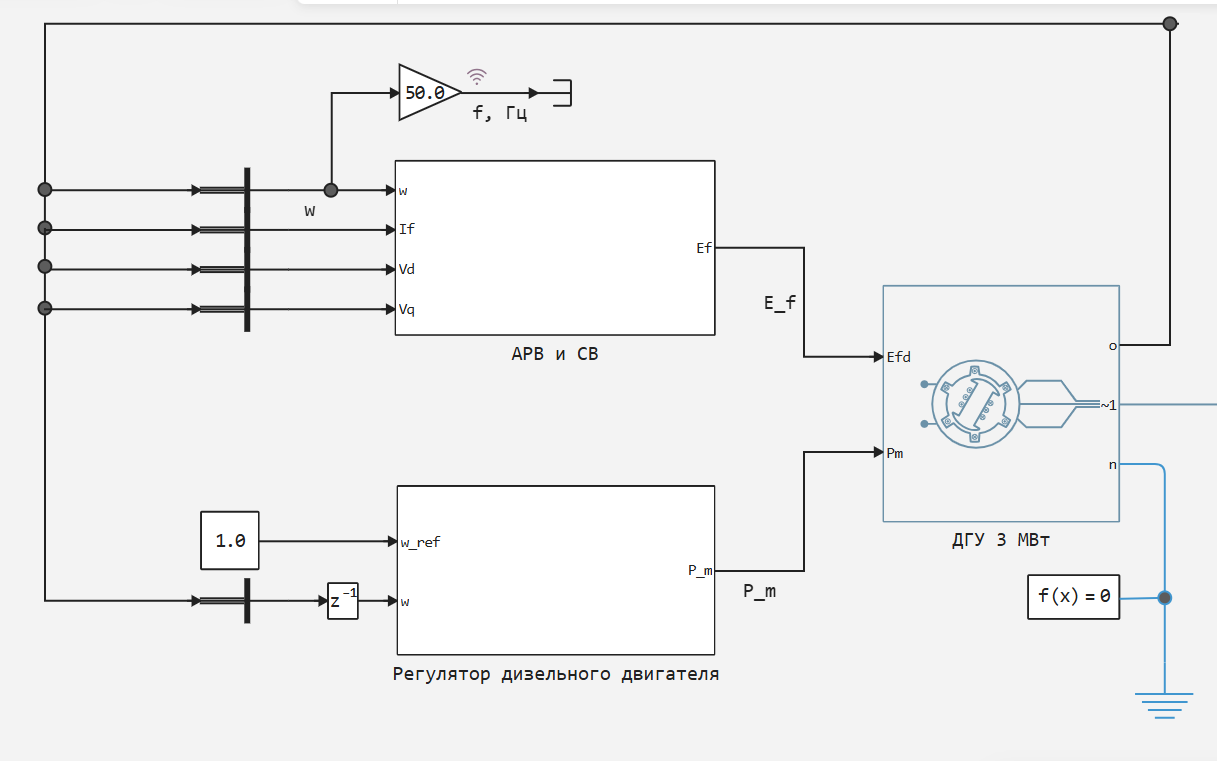
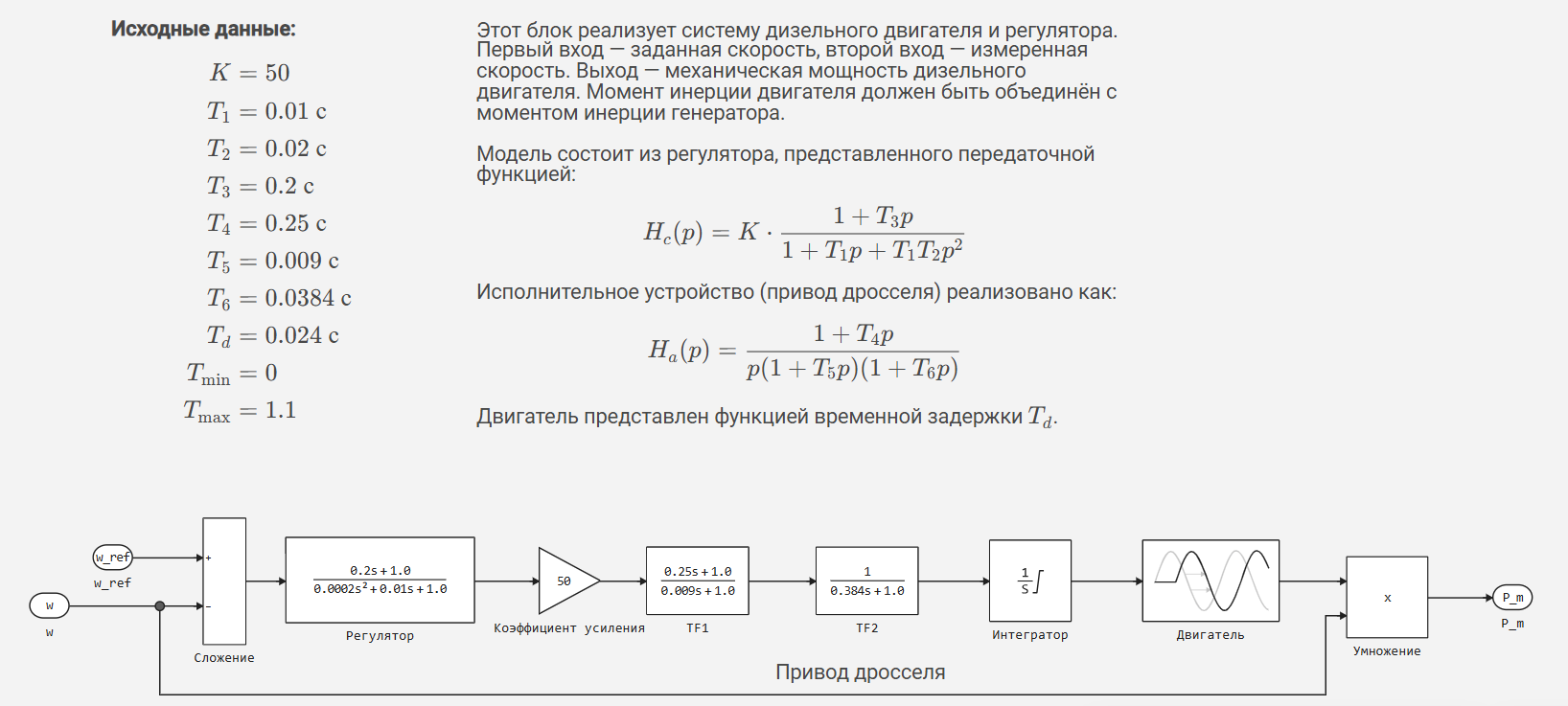
Модель двигателя и регулятора скорости представлена ниже:
Подсистема расчета общего расхода топлива
Описание модели СНЭ
Обобщенная структурная схема СНЭ в составе энергосистемы выглядит следующим образом:
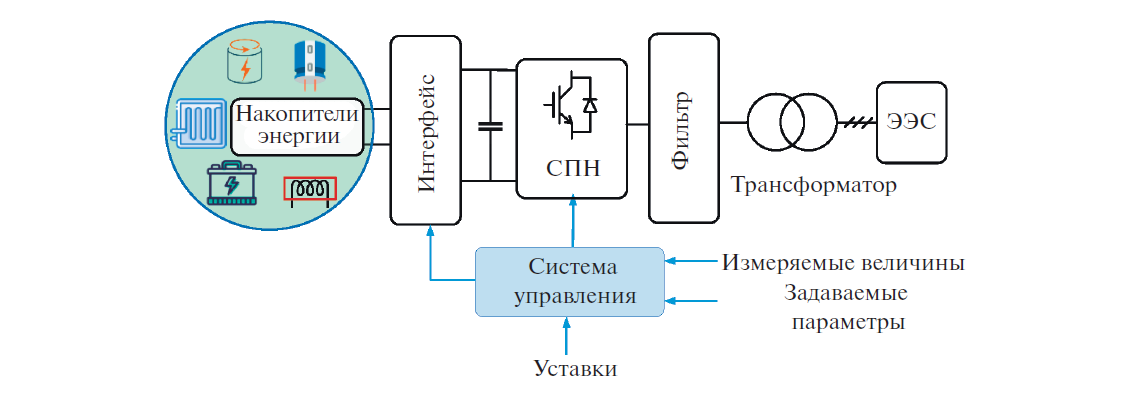
Трехфазный двунаправленный силовой преобразователь напряжения (СПН) является одним из основных элементов в составе схемы подключения СНЭ к энергосистеме. Для управления ключами в основном используется принцип синусоидальной широтно-импульсной модуляции. Детализированные модели СНЭ мы рассматривали в примерах https://engee.com/community/ru/catalogs/projects/trekhfaznyi-invertor-s-sistemoi-upravleniia-na-kpm-ritm и https://engee.com/community/ru/catalogs/projects/istochnik-bespereboinogo-pitaniia. Кроме этого, мы с вами так же говорили про техники моделирования преобразователей в https://engee.com/community/ru/catalogs/projects/sravnenie-tekhnik-modelirovaniia-ac-dc-preobrazovatelei.
В нашем же примере, для сокращения времени расчета при исследовании длительных электромеханических переходных процессов модель СНЭ разработана на основе трехфазного управляемого источника мощности без использования детализированных моделей силового преобразователя и суперкондесаторов (подсистема накопления энергии задаётся своей внешней характеристикой). Такое решение позволяет увеличить шаг расчета на несколько порядков, что в свою очередь снижает требования к вычислительным мощностям, а также позволяет рассчитывать электромеханические переходные процессы длительностью в несколько часов.
Представленная модель СНЭ состоит из направленной (базовые блоки математики) и ненаправленной (физмод блок) части. Направленная часть представляет из себя модель из направленных блоков базовой математики, где формируются два сигнала: активная и реактивная мощность для блока динамической нагрузки. Перед передачей сигналов мощности на физмод блок стоит знак минус, таким образом блок динамической нагрузки будет играть роль источника мощности. Ниже представлена структурная схема модели СНЭ, предназначенной для расчёта электромеханических переходных процессов и исследования алгоритмов управления в составе энергосистемы.
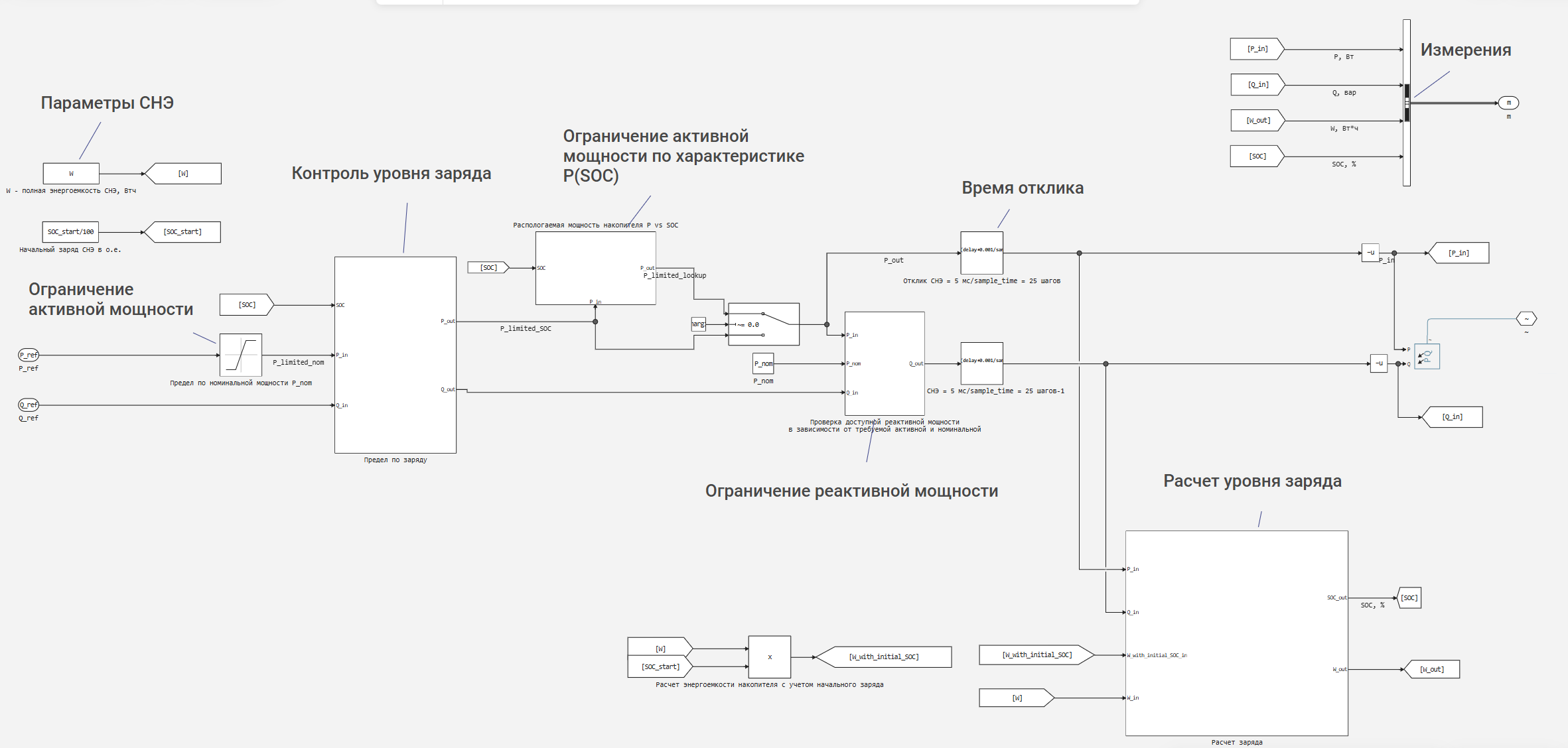
Модель СНЭ включает следующие функциональные блоки:
1. Блок задания параметров СНЭ.
В данном блоке задаются основные номинальные параметры накопителя:
– полная энергоёмкость СНЭ W, Вт·ч;
– начальный уровень заряда SOC_start, %;
2. Ограничение активной мощности по номиналу.
Входное задание по активной мощности P_ref ограничивается по номинальному значению P_nom. Это позволяет учитывать ограничения преобразовательного оборудования по максимально допустимой выдаваемой и потребляемой мощности.
3. Контроль уровня заряда (SOC).
Блок реализует ограничения по активной мощности в зависимости от текущего уровня заряда накопителя. При достижении предельных значений SOC (минимального и максимального) автоматически уменьшается доступная мощность разряда или заряда.
Дополнительно реализовано ограничение по характеристике суперкондесатора P(SOC), задаваемой табличной зависимостью, что позволяет учитывать снижение доступной мощности при низком уровне заряда.
4. Ограничение реактивной мощности.
Реализована проверка допустимой реактивной мощности Q в зависимости от текущей активной мощности и номинальной. Это обеспечивает соблюдение ограничений по полной мощности.
5. Модель динамики отклика СНЭ.
Динамика изменения активной и реактивной мощностей описывается задержкой с заданным временем отклика.
6. Расчёт уровня заряда (SOC).
Уровень заряда рассчитывается на основе текущей активной и реактивной мощности СНЭ и начального значения заряда.
7. Формирование измеряемых величин.
На выход модели формируются сигналы:
– активная мощность P, Вт;
– реактивная мощность Q, вар;
– текущий уровень заряда SOC, %;
– текущая энергоёмкость накопителя W, Вт·ч.
Алгоритм управления СНЭ для сглаживания мощности нагрузки
Алгоритм управления СНЭ для регулирования частоты в автономной энергосистеме выполняет сглаживание набросов/сбросов нагрузки.
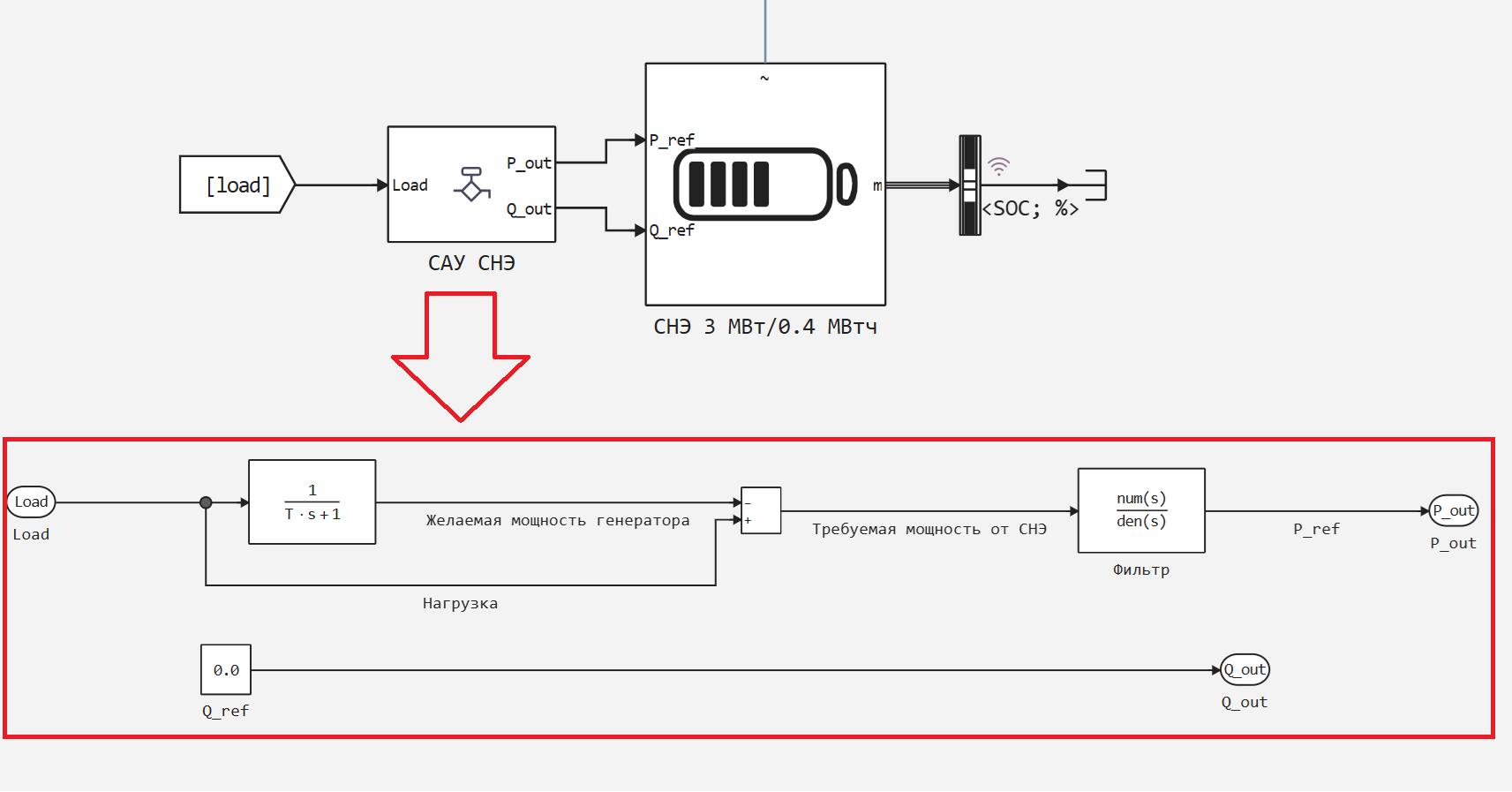
На вход сумматора подаются сигнал мощности нагрузки. Далее этот сигнал дублируется, по одному из каналов управления. Один из сигналов проходит через апериодическое звено первого порядка, в котором задается постоянная времени Т, влияющая на плавность передачи мощности нагрузки от СНЭ к ДГУ. На выходе апериодического звена получается сигнал сглаженной нагрузки. При сложении сигнала нагрузки и сигнала сглаженной нагрузки получается сигнал требуемой мощности от СНЭ. Этот сигнал может быть как положительным, так и отрицательным. Положительное значение соответствует выдаче мощности (разряд), отрицательное – потреблению мощности (заряд).
Результаты симуляции
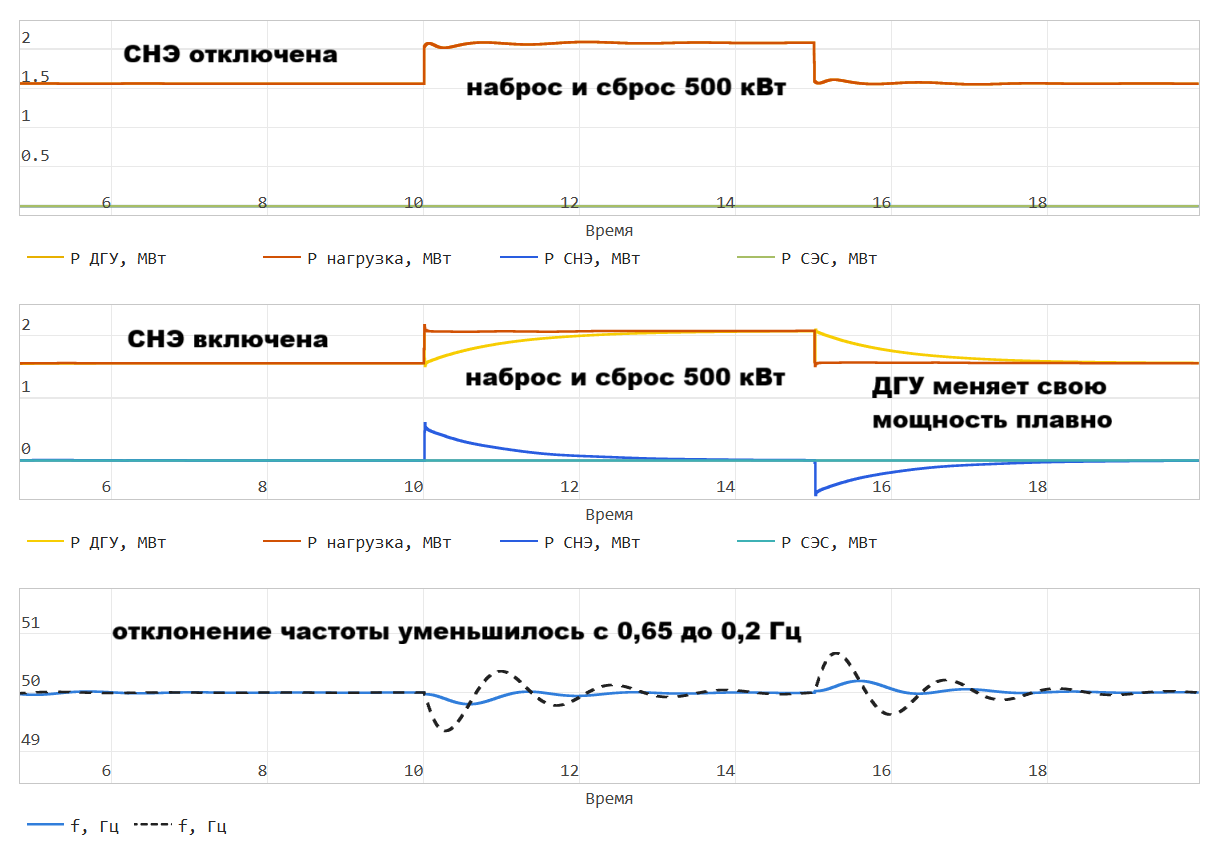
Опыт 1 и 2. Наброс и сброс 0,5 МВт нагрузки на ДГУ с включенной и выключенной СНЭ. Длительность симуляции 20 секунд. Постоянная времени алгоритма 1 секунда.
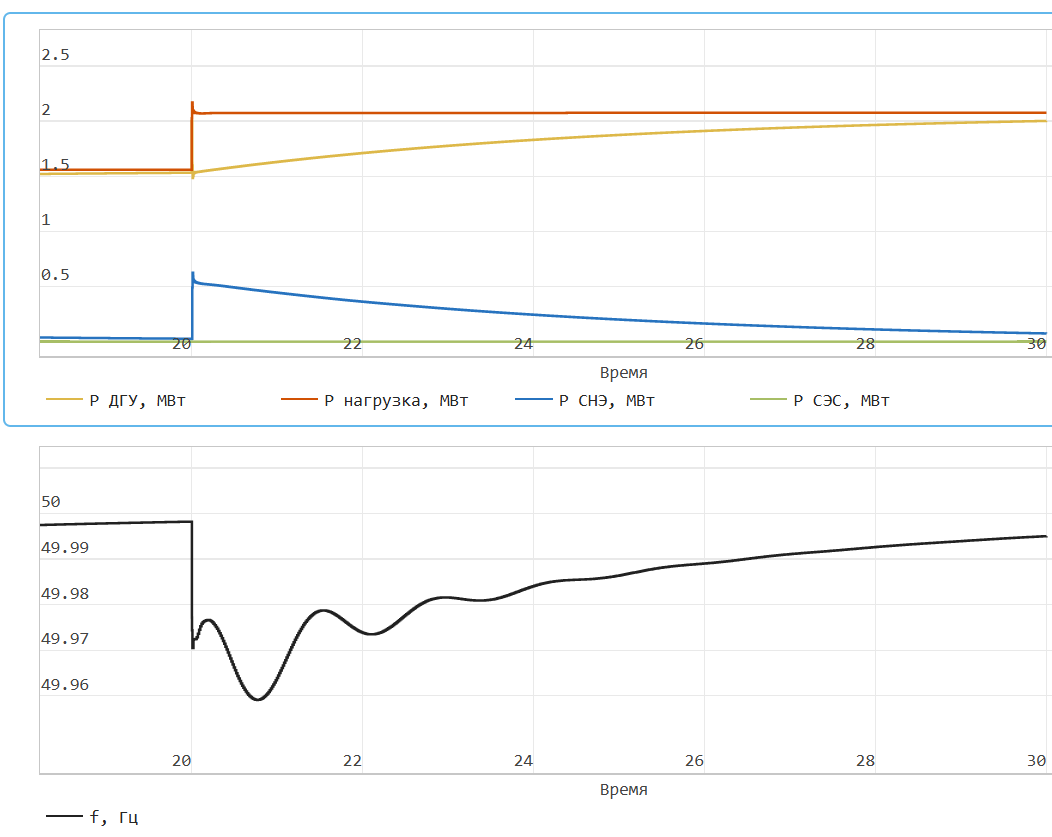
Опыт 3. Наброс 0,5 МВт нагрузки на ДГУ с включенной СНЭ. Длительность симуляции 30 секунд. Постоянная времени алгоритма 5 секунд.
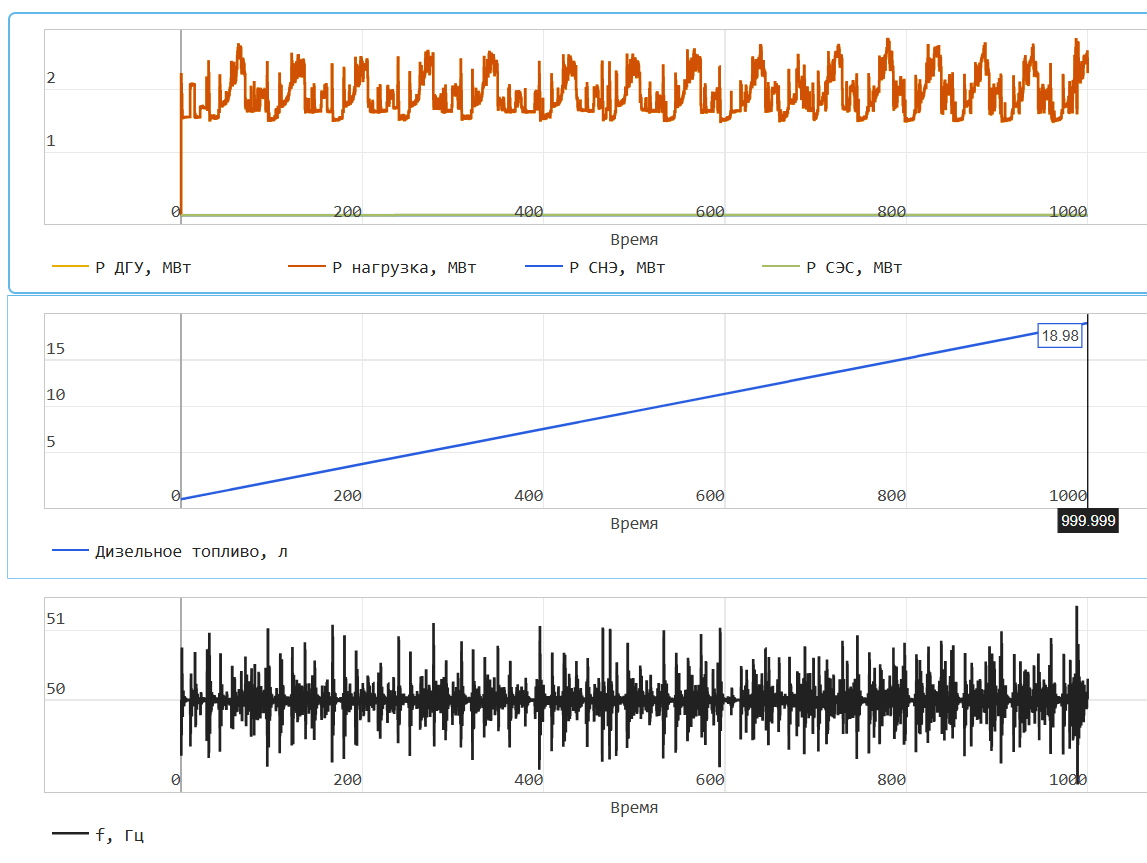
Опыт 4. Работа ДГУ на резкопеременную нагрузку подъемного механизма без СЭС и без СНЭ. Длительность симуляции 1000 секунд.
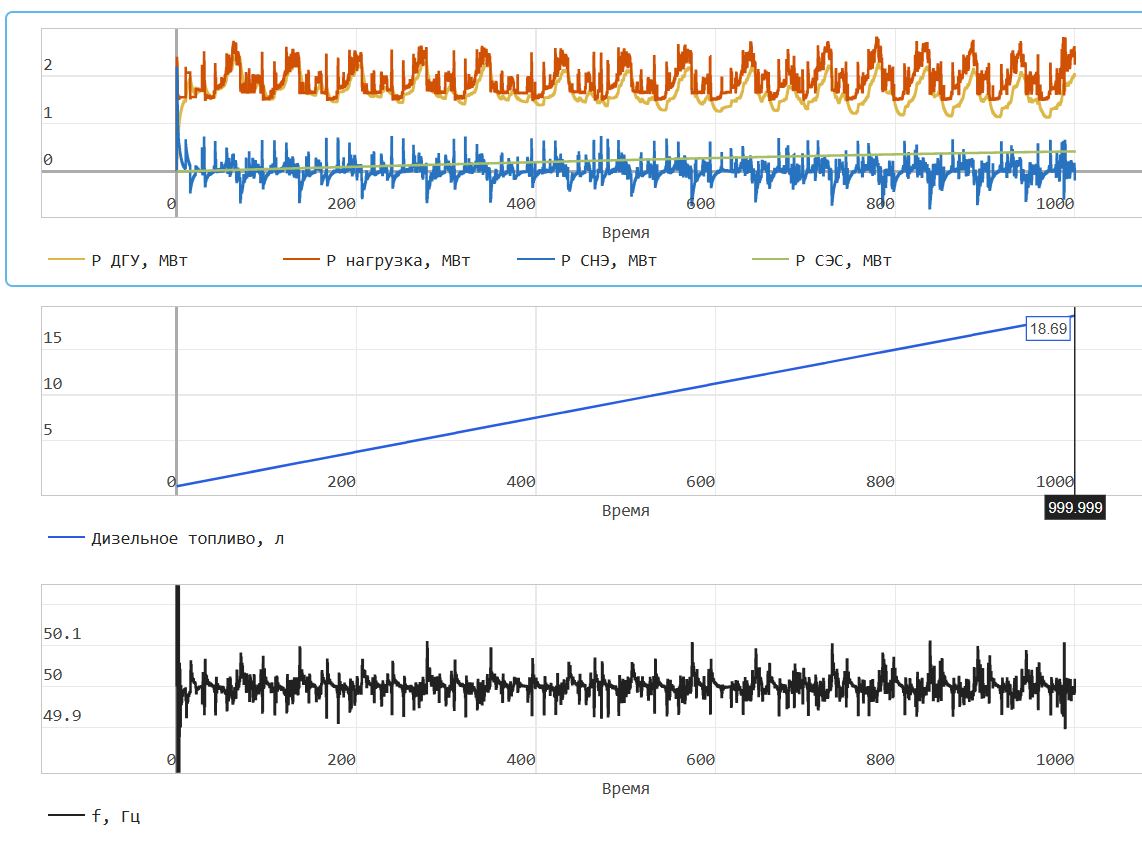
Опыт 5. Работа ДГУ на резкопеременную нагрузку подъемного механизма с СЭС и СНЭ. Длительность симуляции 1000 секунд. Мощность СЭС в ходе моделирования увеличивается от 0 до 0,42 МВт. СНЭ работает по алгоритму сглаживания скачков мощности нагрузки.
Выводы
- В данном проекте показана модель АГЭУ для расчёта электромеханических переходных процессов. Модель предназначена для расчётов режимов, переходных процессов, устойчивости энергосистем, в составе которых имеются ДГУ, СНЭ и СЭС, а также при разработке и апробации алгоритмов управления СНЭ, повышающих управляемость и надёжность энергосистем.
- Разработана упрощенная модель СНЭ для расчета длительных электромеханических переходных процессов.
- Предложен алогритм управления СНЭ. На основании проведенных опытов №1 и №2, можно говорить о том, что применение алгоритма управления СНЭ для сглаживания набросов/сбросов нагрузки уменьшило отклонение частоты с 0,65 Гц до 0,2 Гц при набросе 0,5 МВт нагрузки с постоянной времени алгоритма равной 1 секунды. В опыте 3 при увеличении постоянной времени алгоритма сглаживания до 5 секунд отклонение частоты при набросе 0,5 МВт уменьшилось до 0,05 Гц. На основании проведенных опытов №4 и №5 при работе АГЭУ с включенными СЭС и СНЭ уменьшился расход дизельного топлива ДГУ с 19 до 18,7 литра и увеличилось качество регулирования частоты (максимальное отклонение уменьшилось в 10 раз с 1 Гц до 0,1 Гц).