Моделирование движения электромобиля
Моделирование движения электромобиля
В данном примере будет продемонстрировано моделирование движения электромобиля.
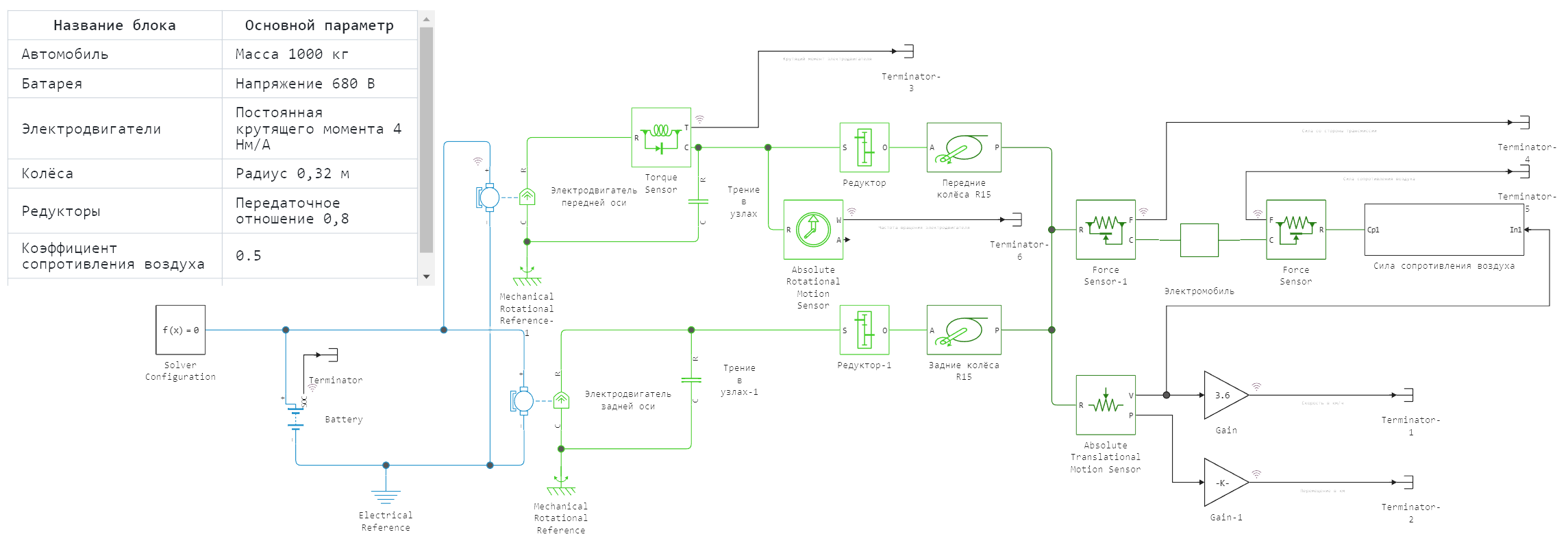
Движение электромобиля и его инерционность описываются блоком Электромобиль. На левый порт этого блока приходит результирующее усилие от двух пар колёс, соединённых с редукторами и электродвигателями, преобразующими и создающими крутящий момент. На правый порт подаётся сила сопротивления воздуха, описываемая одноименной подсистемой.
Основные параметры модели:
| Название блока | Основной параметр |
|---|---|
| Автомобиль | Масса 1000 кг |
| Батарея | Напряжение 680 В |
| Электродвигатели | Постоянная крутящего момента 4 Нм/А |
| Колёса | Радиус 0,32 м |
| Редукторы | Передаточное отношение 0,8 |
| Коэффициент сопротивления воздуха | 0.5 |
Схема модели:
Определение функции для загрузки и запуска модели:
function start_model_engee()
try
engee.close("electro_car", force=true) # закрытие модели
catch err # в случае, если нет модели, которую нужно закрыть и engee.close() не выполняется, то будет выполнена её загрузка после catch
m = engee.load("$(@__DIR__)/electro_car.engee") # загрузка модели
end;
try
engee.run(m) # запуск модели
catch err # в случае, если модель не загружена и engee.run() не выполняется, то будут выполнены две нижние строки после catch
m = engee.load("$(@__DIR__)/electro_car.engee") # загрузка модели
engee.run(m) # запуск модели
end
end
Запуск симуляции
try
start_model_engee() # запуск симуляции с помощью специальной функции, реализованной выше
catch err
end;
Запись из simout в переменные сигналов скорости, момента и сил:
t = simout["electro_car/Скорость в км/ч"].time[:] # время
T = simout["electro_car/Крутящий момент электродвигателя"].value[:] # крутящий момент электродвигателя
speed = simout["electro_car/Скорость в км/ч"].value[:] # скорость автомобиля
forces_left = simout["electro_car/Сила со стороны трансмиссии"].value[:] # силы,
forces_right = simout["electro_car/Сила сопротивления воздуха"].value[:]
w = simout["electro_car/Частота вращения электродвигателя"].value[:];
using Plots
Визуализация результатов моделирования
plot(t, forces_left, label="Усилие от трансмиссии, Н", linewidth=2)
plot!(t, forces_right, label="Сопротивление воздуха, Н", linewidth=2)
plot!(t, (forces_left+forces_right), label="Сумма сил, Н", linewidth=2)
Проанализировав кривую "Сумма сил" можно заметить, что она становится равной нулю, посколько силы, действующие на электромобиль, уравновешиваются. Движение становится равномерным, с постоянной скоростью.
plot(t, T, label="Крутящий момент электродвигателя, Н*м", linewidth=2)
plot!(t, (w * 9.55), label="Частота вращения электродвигателя, об/мин", linewidth=2)
plot!(t, (T .* w ./1000), label="Мощность электродвигателя, кВт", linewidth=2)
По мере разгона автомобиля уменьшается крутящий момент и увеличивается скорость вращения электродвигателя. Механическая мощность, производимая этим электродвигателем, возрастает, поскольку растёт и сила сопротивления воздуха, в зависимости от скорости.
plot(t, speed, label="Скорость, км/ч", linewidth=2)
Определение функции для вычисления времени разгона до 100 км/ч и её применение к данным о скорости электромобиля:
function acceleration_time(speeds, t)
# Находим индекс первого элемента, превышающего 100 км/ч
index = findfirst(x -> x > 100, speeds)
# Если индекс найден, возвращаем соответствующее время
if index != nothing
return println("Время разгона до 100 км/ч: ", t[index], " с")
else
return println("Автомобиль не разогрался до 100 км/ч, максимальная скорость: ", maximum(speed), " км/ч")
end
end
acceleration_time(speed, t)
println("Максимальная скорость: ", maximum(speed), " км/ч")
Вывод:
В данном примере продемонстрировано моделирование движения электромобиля. Он совершает разгон до некоторой установившейся скорости, ускоряться дальше ему не позволяет сила сопротивления воздуха. Были вычислены: время разгона до 100 км/ч и максимальная скорость электромобиля.