Arduino: быстрый старт
Пакет поддержки Arduino: быстрый старт
Первый пример из серии для начала работы с микроконтроллерами Arduino из Engee без погружения в код. В примере пошагово объясняется, как настроить подключение, собрать и запустить на контроллере свою первую модель.
Введение
Автоматизированный перенос модели Engee на встраиваемые системы (в том числе и Arduino) реализован достаточно давно. В ранних проектах можно найти несколько базовых примеров переноса модели в код и выполнения его на Arduino с разной степенью погружения пользователя в низкоуровневое программирование. Такие примеры, в первую очередь, служат в качестве инструкций для освоения сценариев переноса модели на встраиваемые системы. Вот какие сценарии были освещены ранее:
- "Экспорт алгоритма" (пример):
- пользователь разрабатывает алгоритм в модели
- автоматизированно генерируется код C из модели
- пользователь скачивает файлы
- файлы добавляются в проект во внешней IDE
- пользователь интегрирует код алгоритма и код периферии микроконтроллера
- пользователь программирует контроллер
- "Периферийные блоки" (пример):
- пользователь разрабатывает алгоритм в модели
- пользователь переносит код периферии
- автоматизированно генерируется код C из модели
- пользователь скачивает файлы
- файлы добавляются в проект во внешней IDE
- пользователь программирует контроллер
Такие сценарии удобны, когда пользователь не готов отказаться от уже используемого Toolchain для встраиваемых систем, а Engee используется для разработки алгоритма в модели или автоматической интеграции алгоритма и кода периферии.
Для исключения погружения в код С пользователи Engee могут воспользоваться пакетами поддержки встраиваемых систем. Они открывают ещё два совершенно новых сценария:
- "Независимое выполнение"
- пользователь разрабатывает алгоритм в модели
- пользователь добавляет специализированные блоки из пакета поддержки микроконтроллера
- автоматизированно запускается программирование контроллера
- "Интерактивное выполнение"
- пользователь разрабатывает алгоритм в модели
- пользователь добавляет специализированные блоки из пакета поддержки микроконтроллера
- автоматизированно запускается программирование контроллера
- пользователь может управлять моделью, выполняемой на микроконтроллере, менять её параметры и визуализировать сигналы модели.
Подготовка и работа этих сценариев на микроконтроллере Arduino и будет освещена далее.
Шаг 1: Arduino и его Toolchain
Для этого примера нам понадобится:
- Микроконтроллер Arduino (Uno, Mega или другой с чипом AVR)
- Кабель USB
- Установленные на ПК драйвера микроконтроллера
- Toolchain Arduino - ArduinoCLI
Arduino подключим к ПК, убедимся, что драйвера установлены, ПК распознаёт микроконтроллер. На этом этапе сразу определим порт, к которому подключен наш микроконтроллер:
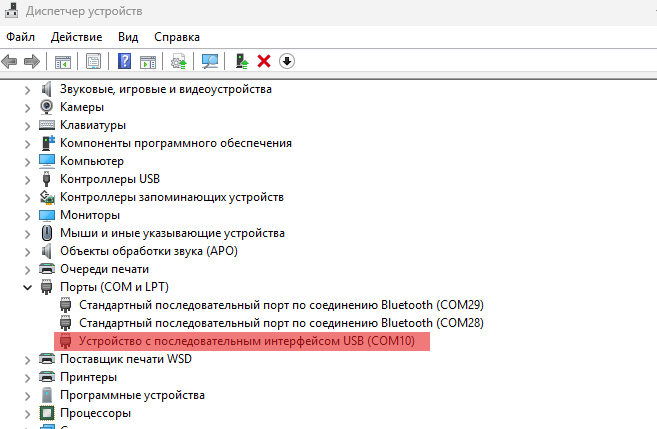
В нашем случае - это Arduno Uno R3, на порте COM10.
Загрузим ArduinoCLI - этот инструмент в дальнейшем будет вызван из Engee автоматически для программирования микроконтроллера. Удобнее всего будет расположить его в определённой директории. В случае этого и последующих примеров его путь определён как "D:\targets\arduino-cli.exe". Запомним его для дальнейшего использования.
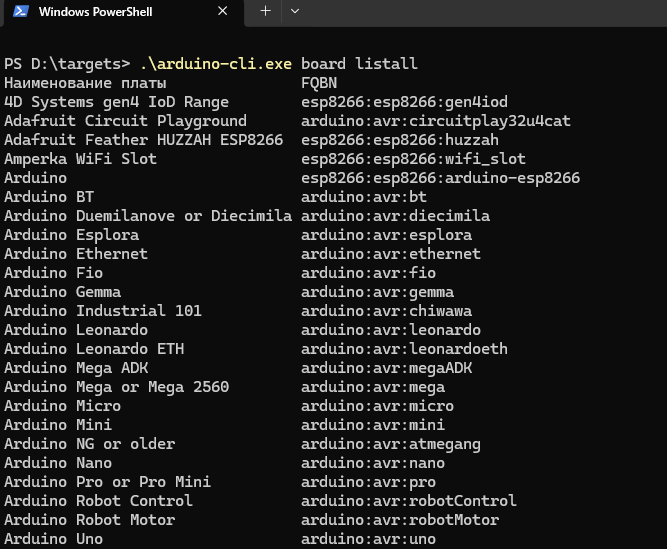
Получим полное имя нашей платы при помощи ArduinoCLI. Для этого перейдём в её директорию, откроем в ней терминал и вызовем, например, в PowerShell команду .\arduino-cli.exe board list

Так мы получим список подключенных по COM устройств. Из вывода командной строки видно, что на COM10 подключена плата Arduino Uno с полным именем (FBQN) arduino:avr:uno - оно также нам далее понадобится.
Доступные FQBN можно получить, например, вызвав команду
.\arduino-cli.exe board listall
Шаг 2: Платформа Engee.Интеграции
Соединение между целевым устройством и ПК установлено, теперь установим соединение между Engee и ПК. Для этого нам понадобится:
- Установить Engee.Интеграции
# engee.package.install("Engee-Device-Manager")
-
Скачать архив с клиентской программой, разархивировать и запустить её. В случае этого примера клиентская программа для удобства расположена в той же директории, что и ArduinoCLI:
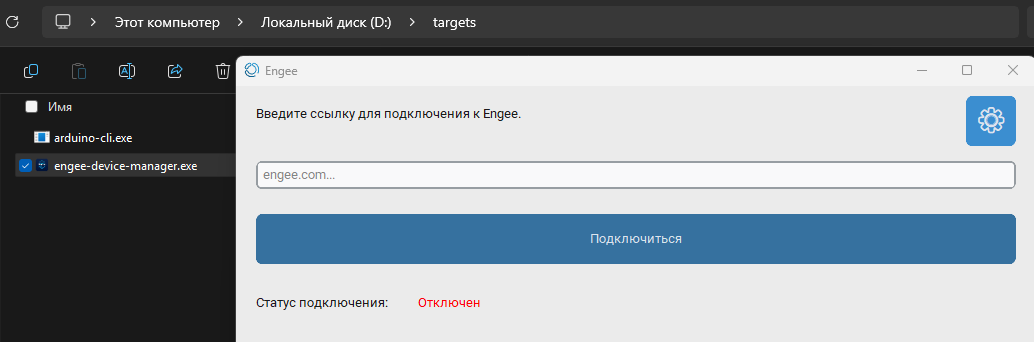
- Установить соединение между Engee и ПК. Нужно вставить полученную ранее ссылку в клиентскую программу и нажать "Подключиться":
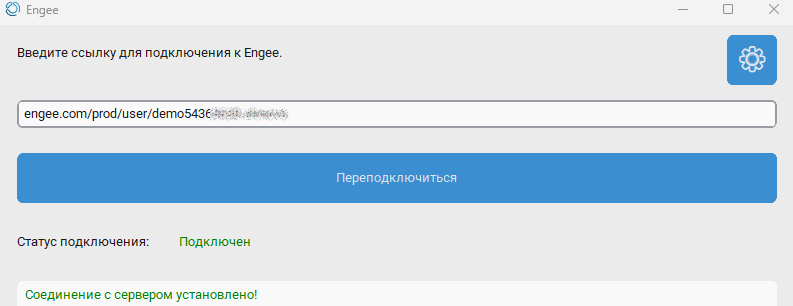
Соединение между ПК и Engee установлено, можно переходить непосредственно к разработке модели и программированию микроконтроллера.
В дополнение, если хотите - можно получить/обновить папку примеров, там можно найти тестовые примеры для работы с внешними устройствами, периферией и микроконтроллерами.
engee.package.getdemos("Engee-Device-Manager")
Шаг 3: Модель примера
Пример "Hello World!" для Arduino - это программа мигания светодиодом. Вот, как она будет выглядеть в модели Engee:
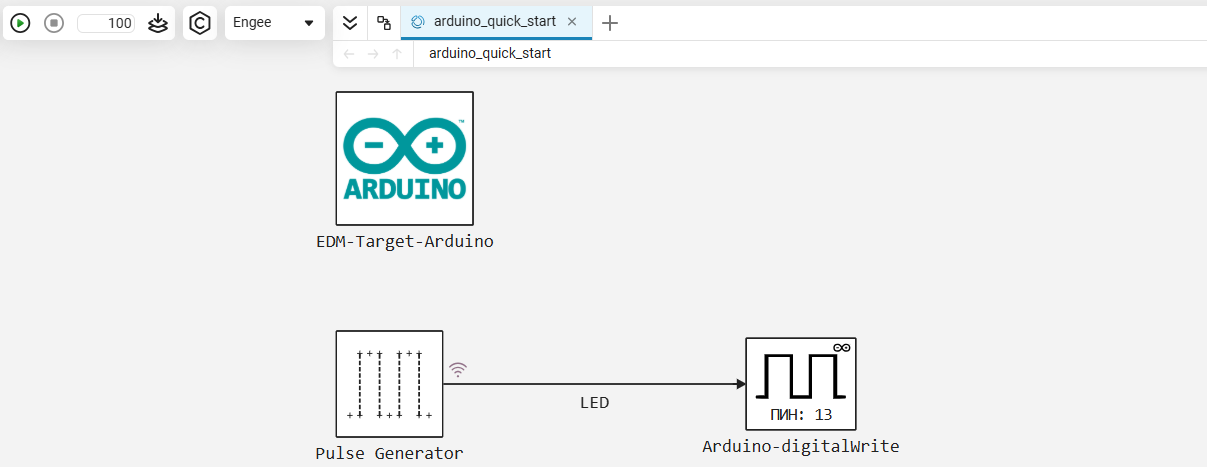
Алгоритм модели заключается в одном блоке - Pulse Generator. Его настройки:
Тип импульса - На основе шагов расчёта; Амплитуда - 1; Период (количество шагов расчета) - 50; Ширина импульса (количество шагов расчета) - 25; Задержка перед первым импульсом (количество шагов расчёта) - 0, Период дискретизации - 0.02.
Блок формирует меандр с частотой 1 Гц и D = 50%.
Сигнал LED на выходе блока передаётся на блок периферии контроллера Arduino-digitalWrite - цифровой выход GPIO 13. На каждом шаге расчёта модели блок вызывает стандартную функцию записи в цифровой выход digitalWrite() из библиотеки Arduino.
Пин 13 - выход, к которому подключен встроенный на отладочной плате светодиод.
Блок EDM-Target-Arduino необходим для установления связи с микроконтроллером и его Toolchain. Вот, как определены настройки блока в текущем примере:
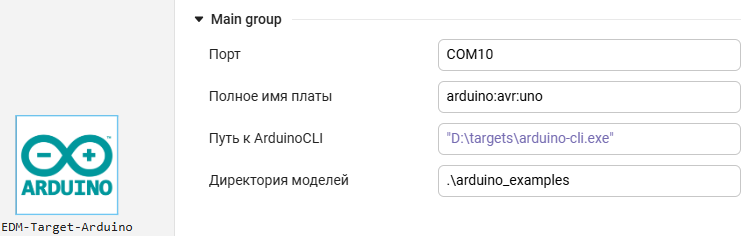
- Порт - имя последовательного порта, к которому подключен наш микроконтроллер. Его можно определить следующим образом:
COM10- для Windows, такое значение мы получили для микроконтроллера в нашем примере./dev/tty/USB0- пример имени последовательного порта для Linux.<auto>- если подключен один микроконтроллер, Engee определит его порт самостоятельно.
- Полное имя платы - FQBN платы, который мы получили ранее. Здесь возможны варианты:
arduino:avr:uno/arduino:avr:mega/arduino:avr:leonardo/ … - в зависимости от того, какая плата подключена.<auto>- если подключен один микроконтроллер, Engee определит его имя самостоятельно.
- Путь к ArduinoCLI - полный путь к ArduinoCLI
"D:\targets\arduino-cli.exe"- такое значение мы скопировали в контекстном меню проводника Windows в нашем примере."D:\targets\arduino-cli"/D:\targets\arduino-cli.exe/D:\targets\arduino-cli- также допустимые варианты указания пути в Windowa/home/Targets/Arduino/arduino-cli- вариант указания пути к ArduinoCLI в Linux<auto>- в таком случае Engee будет автоматически искать ArduinoCLI в соответствии со следующими приоритетами:- пути, добавленные в переменную окружения
PATH; - текущая директория клиентской программы;
C:\Program Files\;C:\Program Files (x86)\.
- пути, добавленные в переменную окружения
- Директория моделей - путь для расположения папки со скетчем
.inoмодели относительно расположения клиентской программы. В нашем примере - это.\arduino_examples, эта папка будет создана автоматически, а итоговая структура папкиtargetsэтого примера будет выглядеть следующим образом:
PS D:\targets> tree /f
Структура папок
Серийный номер тома: 4040-B539
D:.
│ arduino-cli.exe
│ engee-device-manager.exe
│
└───arduino_examples
└───arduino_quick_start
arduino_quick_start.ino
Шаг 4: Моделирование
Модель примера собрана и, прежде чем загружать её на микроконтроллер, естественно, её необходимо проверить путём моделирования в Engee. Это можно сделать и в графическом интерфейсе и автоматизированно в скрипте при помощи программного управления моделированием.
cd(@__DIR__)
name = "arduino_quick_start"
try
engee.close(name, force=true) # закрытие модели
catch err # в случае, если нет модели, которую нужно закрыть и engee.close() не выполняется, то будет выполнена её загрузка после catch
m = engee.load(name*".engee") # загрузка модели
end;
try
engee.run(m) # запуск модели
catch err # в случае, если модель не загружена и engee.run() не выполняется, то будут выполнены две нижние строки после catch
m = engee.load(name*".engee") # загрузка модели
engee.run(m) # запуск модели
end
В ходе моделирования получен результат симуляции с записью в рабочую область сигнала "LED". Получим время и значение сигнала, построим его график для визуальной проверки работы алгоритма:
data = collect(simout[name*"/LED"])
t = data.time
LED = data.value
gr(format=:png)
plot(t, LED; label = :none)
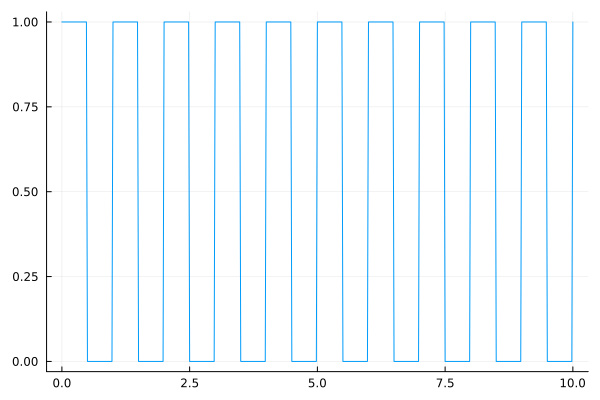
На графике наблюдается меандр с частотой 1 Гц, D = 50% и амплитудой = 1. Этап моделирования в Engee пройден успешно, добавлены блоки из пакета поддержки, а также установлено соединение с микроконтроллером. Теперь можно перейти к выполнению модели по двум запланированным сценариям.
Шаг 5: Независимое выполнение
В первую очередь переключим целевую платформу: вместо Engee в выпадающем списке выберем Target Hardware:
Нажмём на кнопку "Запуск в независимом режиме". Это приведёт к тому, что сгенерируется автономное приложение реального времени и запустится на целевой платформе независимо от Engee. Информация о сборке и загрузке модели видна в окне диагностики.
В процессе сборки модели можно наблюдать, как Engee автоматически запускает ArduinoCLI для сборки проекта, его компиляции и загрузки на микроконтроллер. О ходе процесса загрузки также свидетельствует мигание светодиодов RX/TX на плате Arduino. О выполнении модели свидетельствует мигание светодиода L на плате.
Выполнение в этом режиме на Arduino приводит к тому, что приложение реального времени, сгенерированное из модели, работает на микроконтроллере независимо от Engee. После запуска приложения в Engee мы видим только информацию о затраченном времени на генерацию кода и загрузку на устройство, а также уведомление о запуске модели.
Шаг 6: Интерактивное выполнение
В интерактивном режиме реализован двусторонний обмен данными между Target Hardware и Engee. Для выполнения модели в этом режиме нажмём на кнопку "Запустить модель на железе" - также происходит вызов ArduinoCLI, приложение загружается, а в окне диагностики модели выводятся соответствующие сообщения.
Однако сразу после запуска приложения можно наблюдать, что модель выполняется на Arduino, изменение сигнала демонстрируется на графиках в Engee. О передачи данных из микроконтроллера в Engee свидетельствует периодическое мигание светодиода TX на плате, графики записываемых сигналов можно наблюдать в окне визуализации сигналов.
Кроме этого, сохраняется возможность управления приложением на Arduino - в нужный момент можно, например, остановить выполнение модели на железе.
Для удобства мониторинга модели можно увеличить время - в этом режиме модель выполняется уже не 10 секунд, а 100. Для неограниченного времени выполнения в строку конца интервала моделирования можно вписать
Inf.
Ещё одна интересная и важная возможность работы в этом режиме - изменение параметров модели "на лету". Об этом подробнее рассказывается в продолжающем примере.
Дополнение: Инспектор данных
Ещё один удобный инструмент для мониторинга данных, получаемых от Arduino - это встроенное приложение Engee "Инспектор данных". В интерактивном режиме откроем приложение:
Благодаря этому инструменту появляется возможность анализа сигналов на различных прогонах модели даже в процессе её выполнения.
Дополнение: Результаты работы пакета поддержки
Дополнительно можно обратить внимание на результаты работы пакета поддержки. После запуска независимого/интерактивного режима из модели генерируется код, который Engee размещает в папке /user/codegen_target/ файлового браузера. Получим имя и содержимое самой новой созданной папки:
path = "/user/codegen_target"
folders = filter(f -> isdir(joinpath(path, f)), readdir(path))
if !isempty(folders)
latest_folder = last(sort(folders, by=f -> stat(joinpath(path, f)).ctime))
println("Последняя созданная папка: \n"*latest_folder)
end
println("\nЕё содержимое:")
readdir(joinpath(path,latest_folder)) .|> println;
В этой папке:
- файлы .h, .c - код модели на языке Си, который можно скачать и использовать в сценарии экспорта кода.
- файл codeinfo.json - описание интерфейсов кода модели в формате JSON. Здесь приводятся имена функций, структур данных - состояний, настраиваемых параметров, а также метаданные модели.
Вот, что представляет из себя содержимое этого файла в нашем случае:
for line in eachline(joinpath(path,latest_folder,"codeinfo.json"))
println(line)
end
Сгенерированные при помощи ArduinoCLI исходные файлы приложения можно найти в директории по пути:
C:\Users\<username>\AppData\Local\arduino\sketches\<sketch_id> - там буду находиться те же файлы, что и в папке /user/codegen_target/ файлового браузера Engee.
Путь "Директория моделей", который мы ранее задавали в блоке "EDM-Target-Arduino", теперь будет содержать папку
D:\targets\arduino_examples\arduino_quick_start, содержащую скетч примера arduino_quick_start.ino.
Заключение
В этом примере мы освоили начало работы с пакетом поддержки Arduino в Engee: прошли по шагам в процессе установки соединения, подготовки окружения, разработки модели и выполнения модели в независимом и интерактивном режимах на Arduino.