Пакет поддержки Arduino
|
Перед началом работы выполните общую подготовку и настройку из статьи Запуск моделей на целевом оборудовании. В ней описаны общие шаги для запуска моделей на целевом оборудовании: подготовка окружения, подключение, генерация/сборка и базовая проверка запуска. |
Для работы с Arduino-совместимыми платами в данном режиме используется блок EDM-Target-Arduino, настраивающий взаимодействие с оборудованием.
Перед началом работы необходимо установить arduino-cli — тулчейн для компиляции и прошивки Arduino-оборудования. После установки скопируйте полный путь до исполняемого файла arduino-cli[.exe] и укажите его в соответствующем параметре блока EDM-Target-Arduino.
|
Для автоматического поиска arduino-cli в блоке EDM-Target-Arduino для параметра Путь к ArduinoCLI: укажите значение
Если arduino-cli не найден автоматически, то укажите полный путь вручную, например:
|
| Для работы с Arduino-совместимыми клонами может понадобиться установка дополнительного драйвера. Например, для платы-клона Arduino Mega 2560 под Windows требуется драйвер CH340. |
Подготовка
Убедитесь, что пакет поддержки оборудования установлен и настроен. Его установка подробно описана в разделе Подключение к оборудованию.
Проверка установки arduino-cli
После установки arduino-cli рекомендуется проверить его работоспособность перед началом работы с пакетом поддержки Arduino.
Шаг 1. Проверка версии arduino-cli
Откройте терминал (командную строку) и выполните:
arduino-cli versionОжидаемый результат: Должна отобразиться версия arduino-cli, например:
arduino-cli Version: 0.35.3 Commit: 7a72ce6 Date: 2023-11-15T12:30:00Z
Если команда не найдена:
-
Windows: Убедитесь, что arduino-cli добавлен в переменную среды PATH (рекомендуется) или укажите полный путь:
"C:\Program Files\arduino-cli\arduino-cli.exe" version -
Linux: Проверьте установку через менеджер пакетов или установите вручную.
Шаг 2. Инициализация конфигурации
Создайте файл конфигурации arduino-cli:
arduino-cli config initОжидаемый результат: Будет создан файл конфигурации:
-
Windows:
%USERPROFILE%\.arduino15\arduino-cli.yaml -
Linux:
~/.arduino15/arduino-cli.yaml
Шаг 3. Обновление индекса платформ
Обновите индексы доступных платформ:
arduino-cli core update-indexОжидаемый результат: Сообщение об успешном обновлении индексов.
Шаг 4. Установка платформы для вашей платы
Определите FQBN (Fully Qualified Board Name) вашей платы:
arduino-cli board listallНайдите вашу плату в списке и установите соответствующую платформу:
-
Для Arduino Uno/Nano/Mega (AVR):
arduino-cli core install arduino:avr -
Для ESP8266:
arduino-cli core install esp8266:esp8266 --additional-urls http://arduino.esp8266.com/stable/package_esp8266com_index.json -
Для ESP32:
arduino-cli core install esp32:esp32 --additional-urls https://espressif.github.io/arduino-esp32/package_esp32_index.json -
Для STM32:
arduino-cli core install STMicroelectronics:stm32 --additional-urls https://github.com/stm32duino/BoardManagerFiles/raw/main/package_stmicroelectronics_index.json
Ожидаемый результат: Сообщение об успешной установке платформы.
Шаг 5. Установка драйверов (при необходимости)
Windows
Для некоторых плат-клонов (например, Arduino Mega 2560) может потребоваться драйвер CH340:
-
Скачайте драйвер с официального сайта производителя.
-
Установите драйвер.
-
Переподключите плату.
-
Проверьте появление нового COM-порта в диспетчере устройств.
Для STM32 ST-LINK/V2 на Windows потребуется установка драйвера.
Linux
Обычно драйвера Serial контроллеров встроены в ядро. Если плата не определяется:
lsusbПроверьте наличие вашей платы в списке. При необходимости добавьте правила udev:
# Пример для Arduino
echo 'SUBSYSTEM=="tty", ATTRS{idVendor}=="2341", MODE="0666"' | sudo tee /etc/udev/rules.d/50-arduino.rules
sudo udevadm control --reload-rules
sudo udevadm triggerДля установки драйверов программаторов используйте пакетный менеджер, например:
sudo apt install stlink-toolsШаг 6. Проверка подключения платы
Подключите плату к компьютеру через USB и выполните:
arduino-cli board listОжидаемый результат: Должен отобразиться список подключенных плат с указанием порта:
Port Protocol Type Board Name FQBN Core /dev/ttyUSB0 serial Serial Port (USB) Arduino Uno arduino:avr:uno arduino:avr
Запомните адрес порта (например, /dev/ttyUSB0 для Linux или COM3 для Windows).
Шаг 7. Создание и компиляция тестового скетча
Создайте тестовый проект или создайте файл test_blink/test_blink.ino с содержимым:
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}-
Arduino UNO
Выполните компиляцию:
arduino-cli compile --fqbn "arduino:avr:uno" test_blinkВыполните загрузку:
arduino-cli upload --fqbn "arduino:avr:uno" test_blink -
STM32
Для примера возьмем отладочную плату STM32F411CEU6 «Black pill».
Получить все доступные Board part number (pnum) и дополнительную информацию о вашей плате можно командой:
arduino-cli board details -b STMicroelectronics:stm32:GenF4Укажите Board part number в строке
fqbn. Выполните компиляцию:arduino-cli compile --fqbn "STMicroelectronics:stm32:GenF4:pnum=BLACKPILL_F411CE" test_blinkВыполните загрузку, укажите
upload_methodв зависимости от используемого вами:arduino-cli upload --fqbn "STMicroelectronics:stm32:GenF4:pnum=BLACKPILL_F411CE,upload_method=OpenOCDSTLink" test_blink
Ожидаемый результат: Успешная компиляция и загрузка без ошибок. Светодиод на плате мигает.
Устранение неполадок
| Проблема | Решение |
|---|---|
|
Добавьте arduino-cli в |
|
Проверьте USB-кабель, установите драйверы. |
|
Добавьте пользователя в группу dialout: |
|
Выполните |
|
Проверьте корректность FQBN и наличие установленных библиотек. |
Настройка и запуск модели
-
Откройте модель Engee.
-
Нажмите по кнопке выбора целевой платформы и выберите Target Hardware:
-
Добавьте блок EDM-Target-Arduino из библиотеки блоков на холст Engee и соберите модель или выполните команду
engee.package.getdemos("Engee-Device-Manager") и откройте демо модельexample_arduino-monitor-and-tune.engee.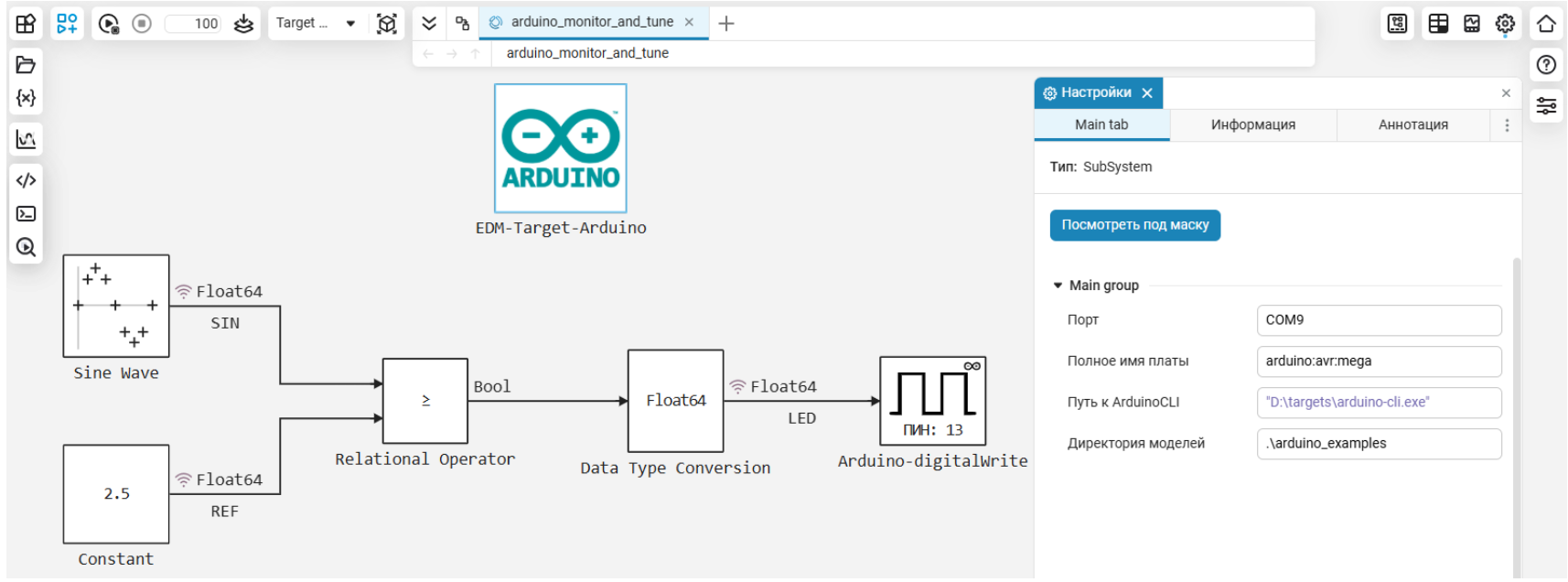
-
Выберите и запустите один из режимов выполнения модели:
-
Запустить модель на железе
 — интерактивное выполнение на целевой платформе с управлением и наблюдением из Engee.
— интерактивное выполнение на целевой платформе с управлением и наблюдением из Engee. -
Запуск в независимом режиме
 — автономное выполнение на целевой платформе без управления из Engee.
— автономное выполнение на целевой платформе без управления из Engee.
-
Режимы выполнения
Подробнее с режимами работы Target Hardware можно ознакомиться в статье Запуск моделей на целевом оборудовании.
|
При запуске модели в интерактивном режиме с настраиваемыми параметрами необходимо в панели настроек модели на вкладке «Генерация кода» задать для параметра Поведение параметров по умолчанию значение |
|
При запуске модели в интерактивном режиме должен быть записан хотя бы один сигнал модели. |