Датчик абсолютного вращательного движения
Датчик движения в механических вращательных системах.
Тип: AcausalFoundation.Mechanical.Rotational.Sensors.Motion
|
Датчик абсолютного вращательного движения Путь в библиотеке: |
|
Датчик относительного вращательного движения Путь в библиотеке: |


Описание
Блок Rotational Motion Sensor представляет собой датчик механического вращательного движения, то есть устройство, которое, будучи включено между двумя механическими узлами вращения, генерирует сигнал, пропорциональный ускорению, угловой скорости или положению (углу). Начальное угловое положение (смещение) можно задать в качестве параметра блока.
Соединения R и C представляют собой механические вращательные порты, которые соединяют блок с узлами, между которыми измеряется движение. Положительное направление блока — от порта R к порту C. Это означает, что скорость измеряется как , где — абсолютные угловые скорости на портах R и C соответственно. Параметр Measurement type позволяет отключить порт C и производить измерения относительно земли.
Соединения α, W и A — порты вывода углового ускорения, скорости и перемещения соответственно. Видимость этих портов контролируется параметрами блока. Если вы включаете порт α, блок выполняет дополнительные вычисления для измерения ускорения на основе скорости. Чтобы избежать усложнения модели, рекомендуется включать только те порты, которые фактически используются для измерения.
Параметр Wrap angle to [0, 2*pi] позволяет управлять выходным диапазоном углового перемещения. При включении этого параметра угловое смещение сохраняется в диапазоне от 0 до радиан (360 градусов), независимо от количества оборотов, выполняемых объектом, и направления вращения. Когда параметр выключен, диапазон выходных данных не ограничен.
На рисунке показана разница между этими двумя вариантами.
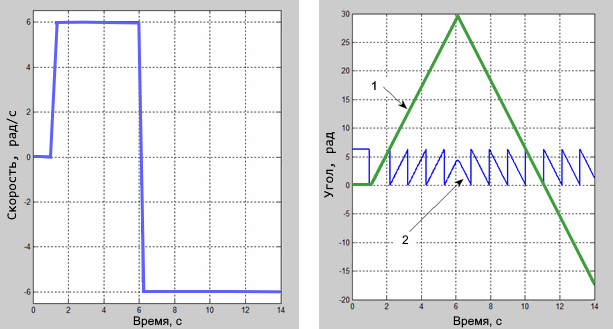
В этом примере объект движется со скоростью 6 рад/с в положительном направлении в течение первых 5 секунд, а затем переключается в отрицательном направлении с той же скоростью. Вывод углового смещения по умолчанию (линия 1) показывает, что объект повернулся вперед на 30 рад, а затем повернулся обратно в отрицательном направлении, продолжая движение до −20 рад. Если вы установите флажок Wrap angle to [0, 2*pi], выходные данные (линия 2) останутся в диапазоне от 0 до рад.
Установка флажка Wrap angle to [0, 2*pi] упрощает разработку моделей со сложной зависимостью между параметрами модели и углом поворота, таких как насосы и двигатели.
Порты
Выход
α — угловое ускорение, рад/с²
скаляр
Порт вывода углового ускорения.
Зависимости
Чтобы использовать этот порт, установите для параметра Acceleration значение Включено.
W — угловая скорость, рад/с
скаляр
Порт вывода угловой скорости.
Зависимости
Чтобы использовать этот порт, установите для параметра Velocity значение Включено.
A — положение (угловое перемещение), рад
скаляр
Порт вывода углового перемещения (угла поворота).
Зависимости
Чтобы использовать этот порт, установите для параметра Position значение Включено.
Ненаправленные
R — вал (положительное соединение)
вращательная механика
Механический вращательный порт, соответствующий положительному соединению датчика.
C — корпус (отрицательное соединение)
вращательная механика
Механический вращательный порт, соответствующий отрицательному соединению датчика.
Зависимости
Чтобы использовать этот порт, установите для параметра Measurement type значение Relative.
Параметры
Measurement type — выбор между абсолютными и относительными измерениями
Absolute (по умолчанию) | Relative
Выберите между абсолютными и относительными измерениями:
-
Relative— измерение ускорения, скорости и положения порта R относительно порта C. -
Absolute— отключение порта C и измерение ускорения, скорости и положения порта R относительно земли (внутреннего опорного узла).
Acceleration — включение выходного порта для измерения углового ускорения
Выключено (по умолчанию) | Включено
При установке этого флажка включается выходной порт α, который позволяет измерять угловое ускорение. Открытие порта α также требует дополнительных вычислений для измерения ускорения на основе скорости, поэтому этот порт по умолчанию отключен.
Velocity — включение выходного порта для измерения угловой скорости
Включено (по умолчанию) | Выключено
При установке этого флажка включается выходной порт W, который позволяет измерять угловую скорость.
Position — включение выходного порта для измерения углового перемещения
Включено (по умолчанию) | Выключено
При установке этого флажка включается выходной порт A, который позволяет измерять положение (угловое смещение).
Wrap angle to [0, 2*pi] — ограничение диапазона выходного сигнала для углового перемещения
Выключено (по умолчанию) | Включено
При установке в положение Включено угловое смещение, выдаваемое датчиком, остается в диапазоне от 0 до радиан (360 градусов), независимо от количества оборотов, выполняемых объектом, и направления вращения. При установке в положение Выключено диапазон выходного сигнала не ограничен.
Установка этого флажка упрощает разработку моделей со сложной взаимосвязью между параметрами модели и углом поворота, таких как насосы и двигатели.
Зависимости
Этот параметр используется, если для параметра Position установлено значение Включено.
Initial angle, rad — начальное смещение датчика
0 рад (по умолчанию)
Начальное угловое положение датчика (смещение).
Зависимости
Этот параметр используется, если для параметра Position установлено значение Включено.