Моделирование упрощённой коробки передач
Введение
В данном примере будет рассмотрено моделирование изменения крутящего момента в упрощённой коробке передач с помощью командного управления моделью.
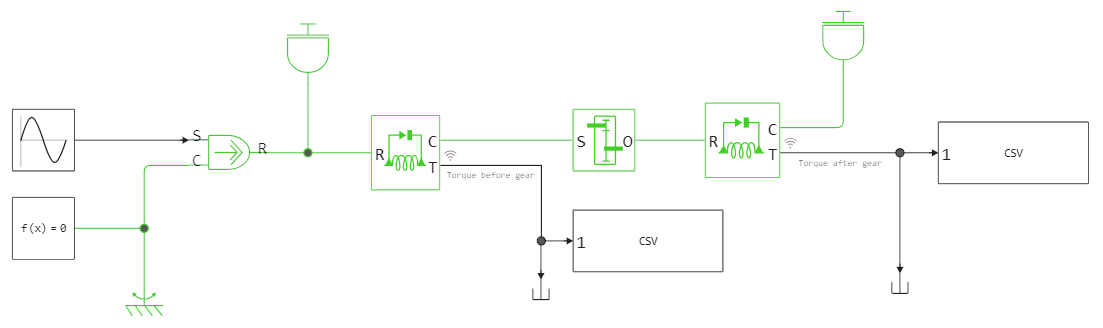
Общий вид модели представлен на рисунке.
На вход источника момента подаётся синусоидальный сигнал, в результате чего в источнике генерируется крутящий момент, направленный на вращение подсоединённых к источнику масс.
Массы связаны между собой одноступенчатой коробкой передач, с передаточным числом ступени равным 2.
С помощью датчиков крутящего момента данные выводятся на график в интерфейсе визуального моделирования, с помощью блоков "To CSV" они выводятся в данный скрипт.
Реализация запуска модели в Engee с помощью программного управления
Загрузка модели:
modelName = "gear_torque";
gear_model = modelName in [m.name for m in engee.get_all_models()] ? engee.open( modelName ) : engee.load( "$(@__DIR__)/$(modelName).engee");Запуск загруженной модели:
results = engee.run( modelName );Загрузка и визуализация данных, полученных в ходе симуляции
Изменение крутящего момента в ходе симуляции лежит в переменной results:
using CSV, DataFrames
torque_before_gear = results["Torque before gear"]; #загрузка данных о моменте до коробки передач
torque_after_gear = results["Torque after gear"]; #загрузка данных о моменте после коробки передачПодключение библиотеки для построение графиков:
using PlotsПостроение графика, описывающего изменение крутящего момента:
plot(torque_before_gear.time, torque_before_gear.value, xlabel="Время, с", ylabel="Момент, Н*м", title="Изменение крутящего момента", linecolor =:red, bg_inside =:white, line =:dashdot, label = "before gearbox")
plot!(torque_after_gear.time, torque_after_gear.value, xlabel="Время, с", linecolor =:blue, bg_inside =:white, line =:solid, label = "after gearbox")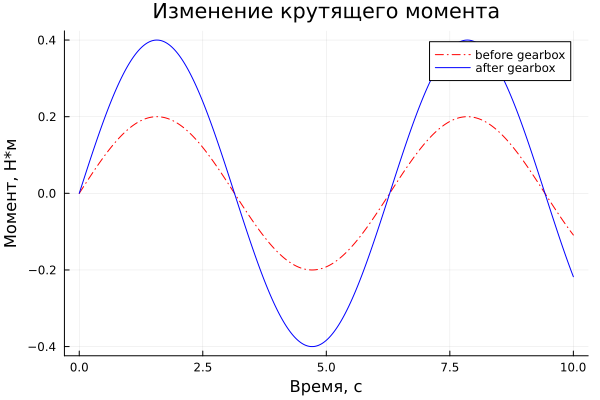
Вывод
В данном примере был продемонстрирован расчёт изменения момента до и после коробки передач.
Для запуска модели и загрузки результатов использовалось программное управление моделью.
Данные, полученные в ходе симуляции, были обработаны и визуализированы с помощью графической библиотеки.