Synchronous Machine Field Circuit
Схема возбуждения синхронной машины с входом по напряжению и выходом по току.
Тип: AcausalElectricPowerSystems.Electromechanical.Synchronous.FieldCircuit
|
Путь в библиотеке: |

Описание
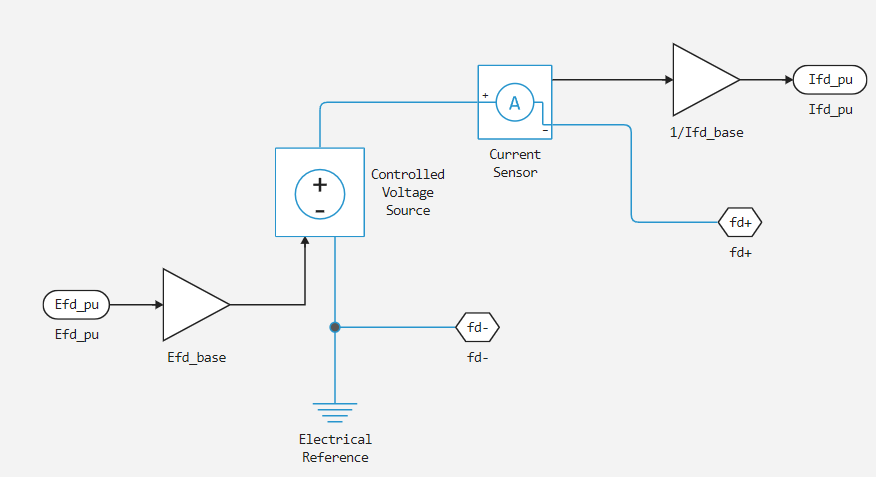
Блок Synchronous Machine Field Circuit подает заданное напряжение и измеряет ток через цепь возбуждения синхронной машины, к которой он подключен. Блок преобразует значения в единицах СИ, которые вы вводите в диалоговом окне, в значения для моделирования в относительных единицах (о.е.).
Блок включает в себя электрическое заземление. Вход физического сигнала Efd_si определяет напряжение, а выход физического сигнала Ifd_pu — ток, оба в о.е. Вход физического сигнала Efd определяет напряжение в В, а выход физического сигнала Ifd обеспечивает ток в А.
Базисы о.е. представляют собой невзаимную систему, Efd и Ifd, а не взаимная система, efd и ifd.
На рисунке ниже показана модель блока Synchronous Machine Field Circuit в о.е.:
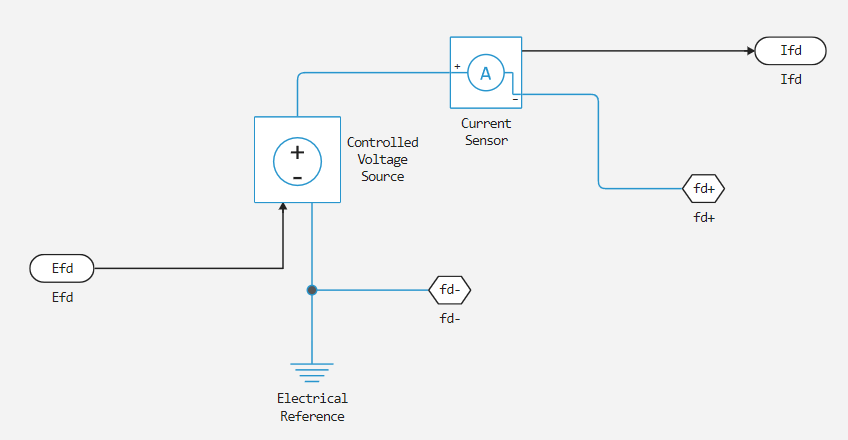
На следующем рисунке показана модель блока Synchronous Machine Field Circuit в СИ:
Порты
Ненаправленные
#
fd+
—
положительный вывод обмотки возбуждения
электричество
Details
Электрический порт, связанный с положительной клеммой обмотки возбуждения.
| Имя для программного использования |
|
#
fd–
—
отрицательный вывод обмотки возбуждения
электричество
Details
Электрический порт, связанный с отрицательной клеммой обмотки возбуждения.
| Имя для программного использования |
|
Вход
#
Efd_si
—
напряжение возбуждения
скаляр
Details
Физический порт ввода, связанный с напряжением поля.
Зависимости
Этот порт используется, если для параметра Input and output unit установлено значение SI.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Efd_pu
—
напряжение возбуждения в о.е.
скаляр
Details
Физический порт ввода, связанный с напряжением поля, в о.е.
Зависимости
Этот порт используется, если для параметра Input and output unit установлено значение Per unit.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Выход
#
Ifd_si
—
ток возбуждения
скаляр
Details
Физический порт ввода, связанный с током поля.
Зависимости
Этот порт используется, если для параметра Input and output unit установлено значение SI.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Ifd_pu
—
ток возбуждения в о.е.
скаляр
Details
Физический порт ввода, связанный с током поля, в о.е.
Зависимости
Этот порт используется, если для параметра Input and output unit установлено значение Per unit.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Основные
#
Input and output unit —
система единиц для измерения физических сигналов
Per unit | SI
Details
Система единиц измерения для физических сигналов. Выберите один из вариантов:
-
SI— международная система единиц (СИ). -
Per unit— система относительных единиц (о.е.).
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Rated apparent power —
номинальная полная мощность
W | uW | mW | kW | MW | GW | V*A | HP_DIN
Details
Номинальная мощность.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Rated electrical frequency —
номинальная электрическая частота
Hz | kHz | MHz | GHz
Details
Номинальная электрическая частота, при которой указывается номинальная полная мощность.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Specify field circuit input required to produce rated terminal voltage at no load by —
укажите цепь возбуждения, необходимую для получения номинального напряжения при отсутствии нагрузки
Field circuit voltage | Field circuit current
Details
Метод параметризации цепи возбуждения. Возможны следующие варианты:
-
Field circuit voltage— используется напряжение цепи возбуждения. -
Field circuit current— используется ток цепи возбуждения. Этот метод является методом по умолчанию.
Этот параметр влияет на видимость параметров Field circuit voltage и Field circuit current.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Field circuit voltage —
напряжение цепи возбуждения
V | uV | mV | kV | MV
Details
Напряжение цепи возбуждения, создающее номинальное напряжение на выходах машины.
Зависимости
Этот параметр используется, если для параметра Specify field circuit input required to produce rated terminal voltage at no load by установлено значение Field circuit voltage.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Field circuit current —
ток цепи возбуждения
A | pA | nA | uA | mA | kA | MA
Details
Ток цепи возбуждения, создающий номинальное напряжение на выходах машины.
Зависимости
Этот параметр используется, если для параметра Specify field circuit input required to produce rated terminal voltage at no load by установлено значение Field circuit current.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Параметры Машины
#
Specify parameterization by —
метод параметризации блока
Fundamental parameters | Standard parameters
Details
Метод параметризации блока. Возможны следующие варианты:
-
Fundamental parameters— настройте импеданс с использованием фундаментальных параметров. -
Standard parameters— настройте импеданс с помощью фундаментальных параметров и укажите постоянные времени по осям и .
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
# Stator d-axis mutual inductance (unsaturated) Ladu — взаимная индуктивность оси статора (ненасыщенная)
Details
Ненасыщенная взаимная индуктивность по оси статора. Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Fundamental parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Rotor field circuit resistance Rfd — сопротивление цепи возбуждения ротора
Details
Сопротивление цепи возбуждения ротора. Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Fundamental parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Stator leakage reactance Xl — реактивное сопротивление рассеяния статора
Details
Реактивное рассеяние статора. Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# d-axis synchronous reactance Xd — синхронное индуктивное сопротивление по оси
Details
Синхронное индуктивное сопротивление по оси . Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# d-axis transient reactance Xd' — переходное реактивное сопротивление по оси
Details
Переходное реактивное сопротивление по оси . Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# d-axis subtransient reactance Xd" — сверхпереходное реактивное сопротивление по оси
Details
Сверхпереходное реактивное сопротивление по оси . Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Specify d-axis time constant —
настройка постоянной времени для оси
Open circuit | Short circuit
Details
Выберите между Open circuit и Short circuit.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
d-axis transient open-circuit Td0' —
переходная постоянная времени разомкнутой цепи возбуждения по оси
s | ns | us | ms | min | hr | d
Details
Переходная постоянная времени разомкнутой цепи возбуждения. Этот параметр должен быть:
-
Больше
0. -
Больше, чем d-axis transient open-circuit Td0".
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters и для параметра Specify d-axis time constant установлено значение Open circuit.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
d-axis transient open-circuit Td0" —
сверхпереходная постоянная времени разомкнутой цепи возбуждения по оси
s | ns | us | ms | min | hr | d
Details
Сверхпереходная постоянная времени разомкнутой цепи возбуждения по оси . Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters и для параметра Specify d-axis time constant установлено значение Open circuit.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
d-axis transient short-circuit Td' —
переходная постоянная времени замкнутой цепи возбуждения по оси
s | ns | us | ms | min | hr | d
Details
Переходная постоянная времени замкнутой цепи возбуждения по оси . Этот параметр должен быть:
-
Больше
0. -
Больше, чем значение параметра d-axis transient short-circuit Td".
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters и для параметра Specify d-axis time constant установлено значение Short circuit.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
d-axis transient short-circuit Td" —
сверхпереходная постоянная времени замкнутой цепи возбуждения по оси
s | ns | us | ms | min | hr | d
Details
Сверхпереходная постоянная времени замкнутой цепи возбуждения по оси . Этот параметр должен быть больше 0.
Зависимости
Этот параметр используется, если для параметра Specify parameterization by установлено значение Standard parameters и для параметра Specify d-axis time constant установлено значение Short circuit.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |