rlevinson
Обратная рекурсия Левинсона — Дурбина.
| Библиотека |
|
Синтаксис
Вызов функции
-
r,u,k,eEvolution = rlevinson(a,eFinal)— возвращает автокорреляционную последовательностьrдля предсказывающего фильтра с коэффициентами, указанными в аргументеa, и мощностью конечной ошибки предсказанияeFinal. Также возвращает полиномиальную матрицуuрекурсивного предсказывающего фильтра, коэффициенты отраженияkи ошибки предсказанияeFinalиз каждой итерации обратной рекурсии Левинсона — Дурбина.
Аргументы
Входные аргументы
#
a —
коэффициенты предсказывающего фильтра
вектор
Details
Коэффициенты предсказывающего фильтра, заданные как вектор.
|
Фильтр, связанный с Если |
| Типы данных |
|
| Поддержка комплексных чисел |
Да |
#
eFinal —
мощность конечной ошибки предсказания
скаляр
Details
Мощность конечной ошибки предсказания, заданная как скаляр.
| Типы данных |
|
| Поддержка комплексных чисел |
Да |
Примеры
Оптимальный порядок авторегрессионной модели
Details
Оценим спектр двух синусоидальных волн с добавлением шума, используя авторегрессионную модель. Выберем наилучший порядок модели из группы моделей, возвращаемых обратной рекурсией Левинсона — Дурбина.
Сгенерируем сигнал с частотой 50000 отсчетов. Зададим частоту дискретизации 1 кГц и длительность сигнала 50 секунд. Синусоидальные волны имеют частоты 50 Гц и 55 Гц. Дисперсия шума равна (0.2)2.
import EngeeDSP.Functions: rlevinson
using Random
Random.seed!(42)
Ns = 50_000
Fs = 1000
t = range(0, step=1/Fs, length=Ns)
x = sin.(2π * 50 * t) + sin.(2π * 55 * t) + 0.2 * randn(Ns)Оценим параметры авторегрессионной модели, используя модель с порядком 100.
ar,eFinal = arcov(x,100)Решим модель, используя обратную рекурсию Левинсона — Дурбина, чтобы оценить автокорреляционную последовательность, рекурсивные предсказывающие фильтры, коэффициенты отражения и ошибки предсказания.
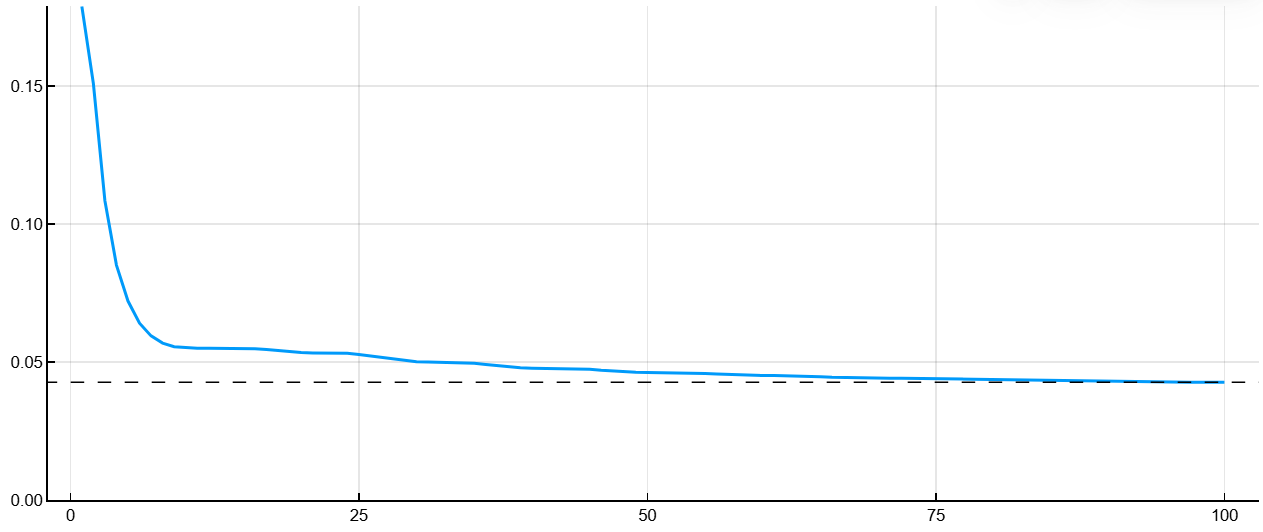
r,u,k,eEvol=rlevinson(ar,eFinal)Построим график ошибок предсказания. Добавим горизонтальную линию для мощности конечной ошибки. Ошибка уменьшается с увеличением порядка фильтра до достижения мощности конечной ошибки.
Оценим спектральную плотность мощности (СПМ) для порядков 1, 5, 25, 50 и 100. Оценим СПМ для исходных авторегрессионных параметров.
N = [1, 5, 25, 50, 100]
nFFT = 8096
psdARpred = zeros(nFFT, 5)
for idx in 1:length(N)
order = N[idx]
ARpred = reverse(u[:, order], dims=1)
psdARpred[:, idx] = 1 ./ abs.(fft(ARpred, nFFT)).^2
end
psdAR = 1 ./ abs.(fft(ar, nFFT)).^2Построим график оценок СПМ. Оценки СПМ для предсказывающих фильтров постепенно приближаются к исходным параметрам авторегрессии по мере увеличения порядка фильтра.
F = (0:1/nFFT:1/2-1/nFFT) * Fs
pow2db(x) = 10 * log10.(x)
plot(F, pow2db.(psdARpred[1:end÷2, :]),
xlabel = "Frequency (Hz)",
ylabel = "Power (dB/Hz)",
grid = true,
legend = :best,
xlims = (35, 70))
plot!(F, pow2db.(psdAR[1:end÷2]),
linestyle = :dash,
linecolor = :black,
label = "Original AR")
order_labels = ["Order = $n" for n in N]
push!(order_labels, "Original AR")
plot!(serieslegend = order_labels)
display(current())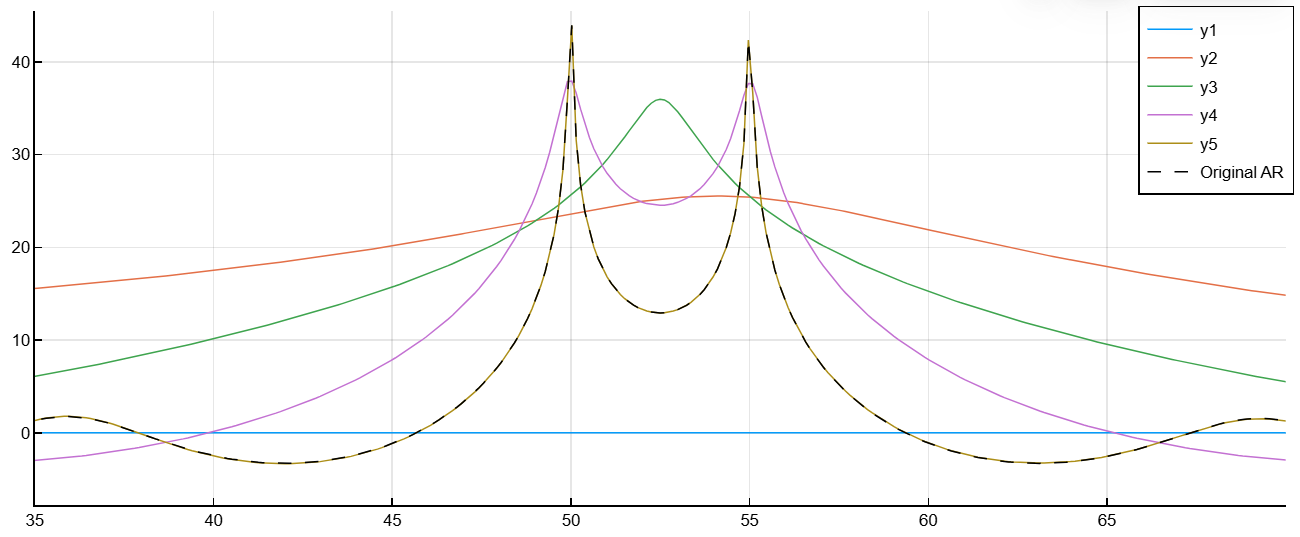
Алгоритмы
Обратная рекурсия Левинсона — Дурбина реализует алгоритм пошагового решения симметричной системы линейных уравнений Тёплица.
где , , а символ обозначает комплексное сопряжение.
В приложениях линейного предсказания:
-
Вектор представляет собой автокорреляционную последовательность входных данных для предсказывающего фильтра, где — элемент с нулевой задержкой. Матрица Тёплица — это автокорреляционная матрица:
-
Вектор представляет собой коэффициенты полинома предсказывающего фильтра в порядке убывания степеней .
-
Скалярная величина обозначает порядок предсказывающего фильтра.
На рисунке показан типичный фильтр такого типа, где — оптимальный линейный предсказатель, — входной сигнал, — предсказанный сигнал, а — сигнал ошибки предсказания. Дисперсия ошибки предсказания — скалярная мощность ошибки предсказания.

Функция rlevinson решает эту систему уравнений для вычисления автокорреляционной последовательности r, имея вектор a с коэффициентами предсказывающего фильтра. Фильтр должен быть минимально-фазовым, чтобы сгенерировать допустимую автокорреляционную последовательность. Скаляр eFinal представляет собой мощность конечной ошибки предсказания и стремится быть целевой ошибкой оценки рекурсии Левинсона — Дурбина, которую реализует функция rlevinson.
Для получения выходных данных u, k и eEvolution функция rlevinson также выполняет разложение обратной матрицы автокорреляции . Это разложение разрешает матрицы и и позволяет эффективно вычислить обратную матрицу автокорреляции :
Выходной аргумент u возвращает матрицу . Эта матрица содержит рекурсивные полиномы предсказывающего фильтра из каждой итерации обратной рекурсии Левинсона — Дурбина:
Каждый вектор содержит рекурсивные коэффициенты полинома, где — -й коэффициент полинома предсказывающего фильтра -го порядка (т.е., -й шаг рекурсии). Например, коэффициенты полинома предсказывающего фильтра -го порядка можно получить как , где a5 = u[5:−1:1, 5], и этот вектор представляет собой полином . Следовательно, -й столбец содержит вектор коэффициентов входного полинома a, который можно получить, используя (u[p+1:−1:1, p+1])'.
Выходной аргумент k возвращает вектор-столбец с коэффициентами отражения, которые являются сопряженными к недиагональным элементам в первой строке . Другими словами, k возвращается как (u[1, 2:end])':
Выходной аргумент eEvolution возвращает вектор-строку с рекурсивными ошибками предсказания, полученными из диагонали матрицы , за исключением первого элемента:
Каждый элемент перечисляет рекурсивные предсказания полинома предсказывающего фильтра -го порядка (т.е., -й шаг в рекурсии). Например, ошибку предсказания полинома предсказывающего фильтра -го порядка можно получить как e5 = eEvolution(4), и это ошибка предсказания при использовании полинома в качестве предсказывающего фильтра.
-
Первый элемент на диагонали , , совпадает с первым элементом автокорреляционной последовательности , .
-
-й элемент на диагонали , , — также последний элемент в
eEvolution— совпадает с мощностью конечной ошибки предсказанияeFinal.