Permanent Magnet DC Motor
DC motor model with electrical and mechanical parameters.
blockType: AcausalElectricPowerSystems.Electromechanical.Brushed.DCMotor
|
Permanent Magnet DC Motor Path in the library: |
|
Wound DC Motor Path in the library: |


Description
The DC Motor block is represented using the following equivalent circuit:
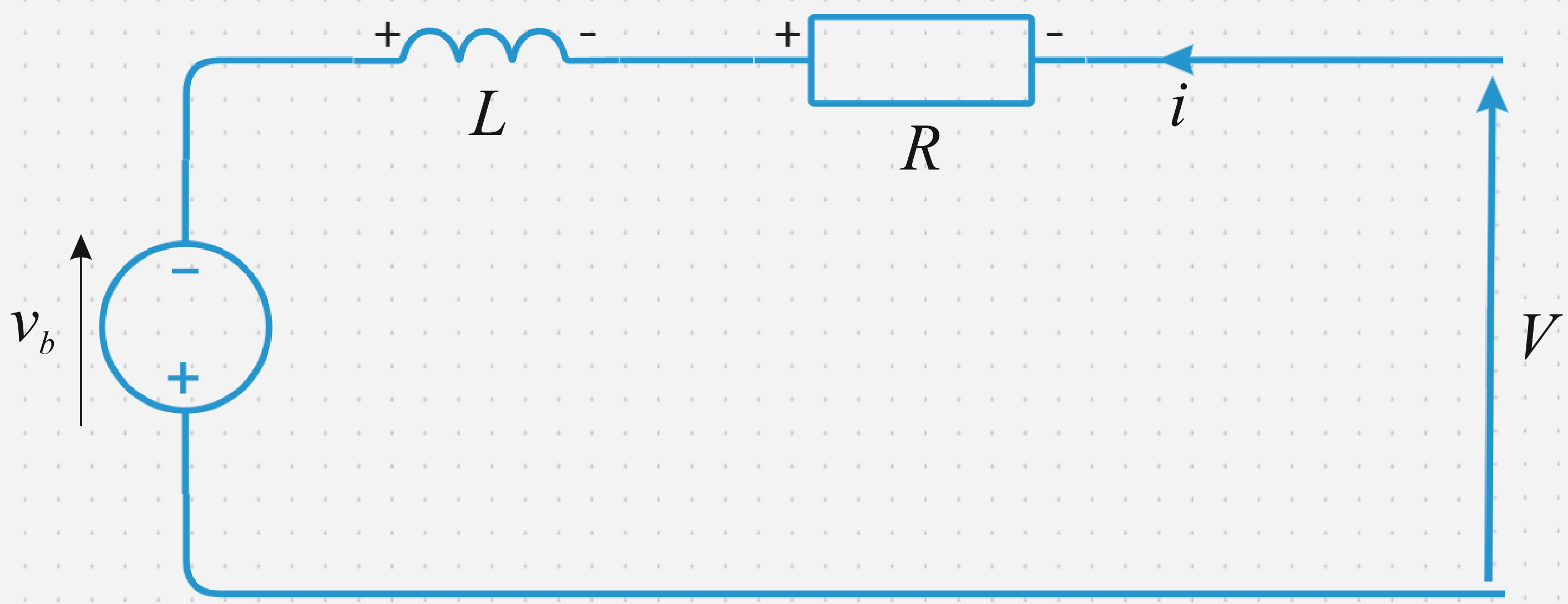
The equivalent circuit parameters for this model are set by setting the Model parameterization parameter to By equivalent circuit parameters. The resistor corresponds to the resistance set in the Armature resistance parameters. The inductance corresponds to the inductance specified in the Armature inductance parameter.
You can specify how the motor magnetic field is created by setting the Field type parameters to the desired value. The permanent magnets of the motor induce a counter-EMF in the armature :
where is the counter-EMF coefficient (value of the Back-emf constant parameters) and is the angular velocity.
The motor generates a torque , which is proportional to the motor current according to the expression:
where is the torque constant.
In a DC motor block, it is assumed that there are no electromagnetic losses. This means that the mechanical power is equal to the electrical power of the armature. Equating these two conditions gives:
Thus, the block parameters specify either , or .
If the magnetic field is generated by current flowing through the windings, the Back-emf constant depends on the excitation current :
where is the mutual inductance of rotor and stator (parameters Field-armature mutual inductance).
The mechanical characteristic for the DC Motor block is related to the parameters given in the previous figure. When Model parameterization is set to By stall torque and no-load speed or By rated load and speed, the block solves for the parameters of the equivalent circuit as follows:
-
In steady-state mode, the inductance has no effect on the torque dependence of on speed .
-
The voltages in the circuit are summed and the expression is rewritten for :
-
The value of is substituted into the torque equation:
When the Model parameterization parameter is set to By stall torque and no-load speed the unit uses the torque and no-load speed to determine the values and (and equivalently ).
When the Model parameterization parameter is set to By rated load and speed the unit uses the rated speed and power to calculate the rated torque. The unit uses the rated torque and idle speed to determine the values of and .
The block simulates motor inertia and damping for all values of the Model parameterization. The resulting torque is equal to:
It is not always possible to measure the rotor damping and its value is not always stated in the manufacturer’s data sheet. Alternatively, usage of the no-load current is used to calculate the rotor damping value.
In the no-load mode, the mechanical torque generated by the electric current must be equal to the rotor damping torque:
where is the no-load current. If the `By no-load current' parameter is selected for the Rotor damping parameterization, this equation is used in addition to the speed-torque equation to determine the values of and other equation coefficients.
The rotor damping value, whether given directly or as no-load current, is taken into account in determining the equivalent circuit parameters for the Model parameterization and the `By stall torque and no-load speed' and `By rated load and speed' options.
When positive current flows from the electrical ports + to -, positive torque acts from the mechanical port C to R.
Ports
+ - positive armature contact
electricity
The electrical port corresponding to the positive armature contact of a DC motor.
- - negative armature contact
electricity
The electrical port corresponding to the negative armature contact of a DC motor.
C - motor housing
`rotational mechanics
The mechanical port of rotation corresponding to the DC motor housing.
R is the rotor of the motor
`rotational mechanics
A mechanical port of rotation corresponding to the rotor of a DC motor.
F+ - positive contact of the field winding
electricity
Electrical port corresponding to the positive contact of the field winding.
Dependencies
To use this port, set the Field type parameters to Wound.
F- is the negative contact of the field winding
electricity
Electrical port corresponding to the negative contact of the field winding.
Dependencies
To use this port, set the Field type parameters to Wound.
Parameters
Electrical torque
Field type - field type
Permanent Magnet (By default) | Wounded
Select one of the following ways to create a field:
-
Permanent Magnet- The magnetic field of the DC motor is created by using a permanent magnet. -
`Wound' - The magnetic field of the DC motor is created by the field winding.
Model parameterization - type of block parameterization
By equivalent circuit parameters (by default) | By stall torque and no-load speed | By rated load and speed
Select one of the following methods to parameterise the block:
-
By equivalent circuit parameters- by equivalent circuit parameters of the motor. -
By stall torque and no-load speed- by starting torque and no-load speed, which the unit converts to equivalent circuit parameters. -
By rated load and speed- by rated power and speed, which the unit converts to equivalent circuit parameters.
Dependencies
To use this parameter, set the Field type parameters to `Permanent magnet'.
Field resistance - field winding resistance
`100 ohms (by default).
The electrical resistance of the field winding.
Dependencies
To use this parameter, set the Field type parameters to Wound.
Field inductance is the field inductance
1 Gn (By default).
Field winding inductance.
Dependencies
To use this parameter, set the Field type parameters to Wound.
Field-armature mutual inductance - rotor and stator mutual inductance
0.15 Gn (by default).
Mutual inductance of rotor and stator.
Dependencies
To use this parameter, set the Field type parameters to Wound.
Initial field current - initial field current
0 A (by default).
Initial field current.
Dependencies
To use this parameter, set the Field type parameters to Wound.
Armature resistance - armature resistance
`3.9 ohms (by default).
The electrical resistance of the motor armature.
Dependencies
To use this parameter, set the Model parameterization parameter to By equivalent circuit parameters.
Armature inductance - armature inductance
`12e-6 Gn (by default).
The armature inductance of the motor armature. If you do not have information about this inductance, set this parameters value to a small non-zero number.
Define back-emf or torque constant - Define constants
Specify back-emf constant (by default) | Specify torque constant.
Specify whether the motor constant to be specified is the back-EMF coefficient or the torque constant. When specified in SI units, these constants have the same value, so only one of them can be specified in the block dialogue box.
Dependencies
To use this parameter, set the Model parameterization parameter to `By equivalent circuit parameters'.
Back-emf constant - counter-EMF coefficient
0.000687549354157 V/(rad/s) (by default).
The ratio of the EMF generated by the motor to the motor speed.
Dependencies
To use this parameter, set the Define back-emf or torque constant parameters to Specify back-emf constant.
Torque constant is the torque constant
0.0006876 N-m/A (By default).
The ratio of the torque produced by the motor to the current flowing.
Dependencies
To use this parameter, set the Define back-emf or torque constant parameters to Specify torque constant.
Stall torque - starting torque
0.00024 N-m (by default).
The amount of torque produced by the motor when the speed is zero.
Dependencies
To use this parameter, set Model parameterization to By stall torque and no-load speed.
No-load speed is the no-load speed
2000.1473 rad/s (By default).
No-load speed of the motor.
Dependencies
To use this parameter, set Model parameterization to By rated load and speed.
*Rated speed (at rated load)` is the rated speed
1570.7963 rad/sec (by default)
Motor speed at rated mechanical power.
Dependencies
To use this parameter, set Model parameterization to By rated load and speed.
Rated load (mechanical power) - rated load
0.08 W (by default).
The mechanical power for which the motor is designed at rated speed.
Dependencies
To use this parameter, set Model parameterization to By rated load and speed.
Rated DC supply voltage - Rated DC supply voltage
`1.5 V (by default).
The voltage for which the power rating is set.
Dependencies
To use this parameter, set Model parameterization to By stall torque and no-load speed or By rated load and speed.
Rotor damping parameterization - rotor damping parameterization
By damping value (By default) | By no-load current.
Select one of the following ways to set the rotor damping:
-
By damping value- set the rotor damping value directly, using the Rotor damping parameters in the Mechanical group. -
By no-load current- the unit calculates the rotor damping based on the values set for the parameters No-load current and DC supply voltage when measuring no-load current. When this option is selected, the Rotor damping parameters in the Mechanical group are not available.
No-load current - no-load current
`0 (By default)
Specify the no-load current, A, to be used for the rotor damping calculation.
Dependencies
To use this parameter, set Rotor damping parameterization to By no-load current.
DC supply voltage when measuring no-load current - DC supply voltage when measuring no-load current
1.5 V (by default).
Set the DC supply voltage corresponding to the no-load current value to be used for the rotor damping calculation.
Dependencies
To use this parameter, set Rotor damping parameterization to By no-load current.
Mechanical
Rotor inertia - rotor inertia
1e-9 kg-m² (by default)
The resistance of the rotor to a change in motor speed. The value can be zero.
Rotor damping - rotor energy dissipation
0 (By default)
Energy dissipated by the rotor, N-m/(rad/s). The value may be zero.
Dependencies
To use this parameter, set the Rotor damping parameterization in the Electrical Torque group to `By damping'.
Initial rotor speed - Initial rotor speed
`0 (By default)
Rotor speed at the beginning of modelling, rad/s.