Энкодер
Модель энкодера, преобразующая угловое положение вала в электрические импульсы.
Тип: AcausalElectricPowerSystems.Sensors.IncrementalShaftEncoder
|
Путь в библиотеке: |
Описание
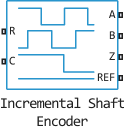
Блок Энкодер представляет собой устройство, преобразующее информацию об угловом положении вала в электрические импульсы. Блок производит N импульсов на портах A и B за один оборот вала, где N — значение, которое задается параметром Pulses per Revolution . Импульсы A и B сдвинуты по фазе на 90 градусов. Если вал вращается в положительном направлении, то А опережает В. Блок производит один индексный импульс на порте Z один раз за оборот. Фронт импульса Z всегда совпадает с фронтом импульса A, а длина равна длине импульсов A и B. Напряжения на портах A, B и Z определяются относительно порта Ref.
Используйте этот блок, если вам нужно смоделировать сигналы энкодера, либо для поддержки разработки алгоритма декодирования, либо для включения эффектов квантования. В ином случае используйте блок Датчик абсолютного вращательного движения.
Предположения и ограничения
Блок Энкодер не является линеаризуемым. Для исследований проекта управления, которые требуют линеаризации модели, используйте блок Датчик абсолютного вращательного движения.
Порты
Ненаправленные
R — вал
скаляр
Механический вращательный порт, соответствующий валу датчика.
C — корпус
скаляр
Механический вращательный порт, соответствующий корпусу датчика.
A — напряжение
скаляр
Электрический порт, соответствующий импульсам А энкодера.
B — напряжение
скаляр
Электрический порт, соответствующий импульсам В энкодера.
Z — индекс или синхронизация
скаляр
Электрический порт, соответствующий импульсам Z энкодера (индексным или синхронизрующим).
REF — электрический опорный вывод
скаляр
Электрический порт, общий для сигналов A, B и Z.
Параметры
Pulses per revolution — количество импульсов на один оборот
2 (по умолчанию)
Количество импульсов, вырабатываемых на каждой из фаз A и B за один оборот вала.
Output voltage amplitude — амплитуда выходного напряжения
5 В (по умолчанию)
Амплитуда выходного напряжения энкодера при высоком уровне выходного сигнала.
Index pulse offset relative to shaft initial angle — cмещение индексного импульса
0 (по умолчанию)
Смещение индексного импульса Z относительно угла поворота вала в начале моделирования. Этот параметр позволяет вам установить начальное местоположение индексного импульса.