Индуктивный датчик положения ротора
Индуктивный датчик положения ротора с четырьмя катушками индуктивности.
Тип: AcausalElectricPowerSystems.Sensors.InductiveRotorPosition
|
Путь в библиотеке: |

Описание
Блок Индуктивный датчик положения ротора использует теорию потерь на вихревые токи для получения данных о положении ротора. Датчик состоит из четырех плоских катушек и проводящего диска, которые определяют положение ротора. Диск датчика имеет синусоидальную форму и сделан из проводящего материала. Расстояние между четырьмя плоскими катушками эквивалентно 90 градусам одного цикла.

Уравнения
Напряжения между элементами датчика описываются уравнениями:
где
-
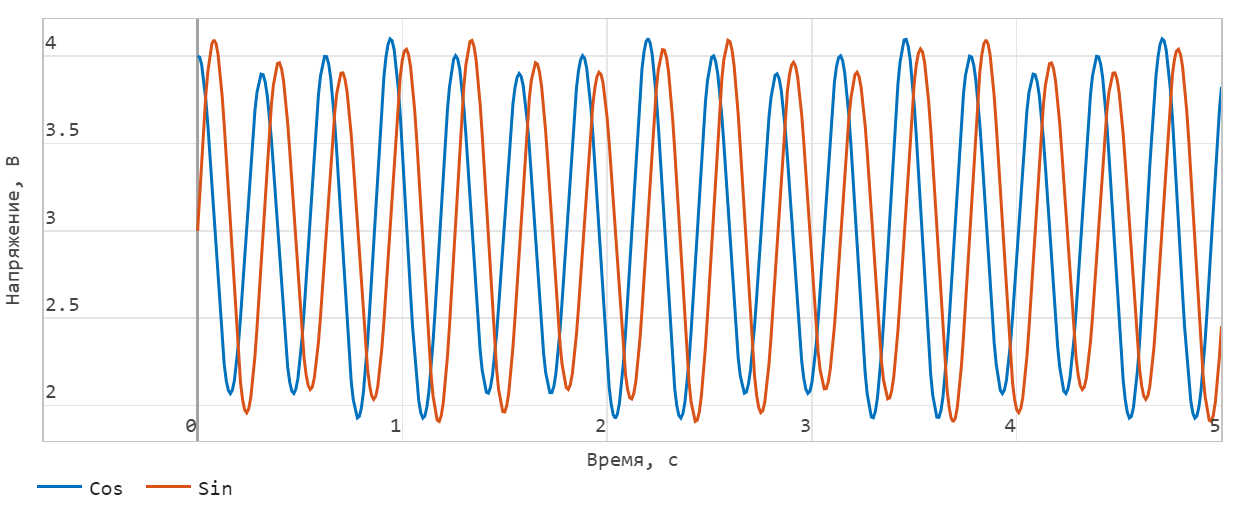
— косинусоидальное напряжение;
-
— синусоидальное напряжение;
-
и — амплитуды напряжения для осей и , отражающие рассогласование чувствительности;
-
и — смещения напряжения для осей и ,
-
— количество пар полюсов;
-
— угол ротора;
-
— квадратуная ошибка;
-
— коэффициент неустойчивости.
Декодирование угла вычисляется по формуле:
На этом рисунке показано влияние коэффициента неустойчивости:
Переменные
Используйте группу параметров Целевые значения, чтобы установить приоритет и начальные целевые значения для переменных параметров блока перед моделированием. Для получения дополнительной информации см. Настройка физических блоков с помощью целевых значений.
Порты
Ненаправленные
#
R
—
вал датчика
вращательная механика
Details
Механический порт вращения, соответствующий положительному соединению датчика.
| Имя для программного использования |
|
#
C
—
корпус датчика
вращательная механика
Details
Механический порт вращения, соответствующий отрицательному (опорному) соединению датчика.
| Имя для программного использования |
|
#
yp
—
положительная клемма оси
электричество
Details
Электрический порт, связанный с положительной клеммой оси .
Зависимости
Чтобы использовать этот порт, установите для параметра Выходной интерфейс значение Электрические порты.
| Имя для программного использования |
|
#
yn
—
отрицательная клемма оси
электричество
Details
Электрический порт, связанный с отрицательной клеммой оси .
Зависимости
Чтобы использовать этот порт, установите для параметра Выходной интерфейс значение Электрические порты.
| Имя для программного использования |
|
#
xp
—
положительная клемма оси
электричество
Details
Электрический порт, связанный с положительной клеммой оси .
Зависимости
Чтобы использовать этот порт, установите для параметра Выходной интерфейс значение Электрические порты.
| Имя для программного использования |
|
#
xn
—
отрицательная клемма оси
электричество
Details
Электрический порт, связанный с отрицательной клеммой оси .
Зависимости
Чтобы использовать этот порт, установите для параметра Выходной интерфейс значение Электрические порты.
| Имя для программного использования |
|
Выход
#
Angle
—
угол поворота, рад
скаляр
Details
Угол поворота магнитного поля в плоскости - , возвращается в виде скаляра.
Зависимости
Чтобы использовать этот порт, установите для параметра Выходной интерфейс значение Угловое положение
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Параметры
# Количество пар полюсов — количество пар полюсов
Details
Число пар полюсов.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Напряжение по оси X —
напряжение по оси
V | uV | mV | kV | MV
Details
Амплитуда напряжения по оси .
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Напряжение по оси Y —
напряжение по оси
V | uV | mV | kV | MV
Details
Амплитуда напряжения по оси .
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Смещение напряжения по оси X —
смещение напряжения по оси
V | uV | mV | kV | MV
Details
Разность потенциалов при протекании электрического тока через проводник в отсутствие внешнего магнитного поля по оси .
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Смещение напряжения по оси Y —
смещение напряжения по оси
V | uV | mV | kV | MV
Details
Разность потенциалов при протекании электрического тока через проводник в отсутствие внешнего магнитного поля по оси .
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Квадратурная ошибка —
квадратурная ошибка
rad | deg | rev | mrad | arcsec | arcmin | gon
Details
Величина квадратурной ошибки. Квадратурное переключение может уменьшить ошибки смещения.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент неустойчивости — коэффициент неустойчивости
Details
Коэффициент неустойчивости.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Выходной интерфейс —
интерфейс для декодированной информации
Электрические порты | Угловое положение
Details
Интерфейс для декодированной информации, доступные значения:
-
Электрические порты. -
Угловое положение.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |