Интеграция C кода в модели Engee с использованием блока C Function
В данном примере представлены различные способы интеграции C кода в модели Engee с использованием блока C Function.
Перед началом работы подключим необходимые библиотеки:
using Plots
using MATLAB
plotlyjs();И определим переменные, которые потребуются для запуска симуляций:
Ts = 0.001;
Q = 1e-3;
R = 1e-4;
processNoisePower = Q * Ts;
measurementNoisePower = R * Ts;Используем макрос @DIR для того, чтобы узнать папку, в которой лежит интерактивный скрипт:
demoroot = @__DIR__"/user/start/examples/base_simulation/ccodeintegration"Основы использования блока C Function
Рассмотрим простые примеры использования блока C Function, иллюстрирующие основы интеграции C кода в модель Engee.
1. Работа с многомерными сигналами, передача параметров и использование директивы #define
В модель cCodeIntegration_basics.engee добавлен блок C Function, на вход которого поступает синусоидальный сигнал in:
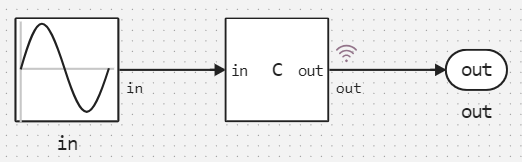
Предположим, что мы хотим увеличить амплитуду синусоиды in в gain раз и сдвинуть её на величину bias. То есть выходной сигнал должен определяться по формуле out = gain * in + bias.
Перейдём в настройки блока C Function, нажмём кнопку "Редактировать исходный код" и проанализируем содержимое вкладки Output code редактора исходного кода:
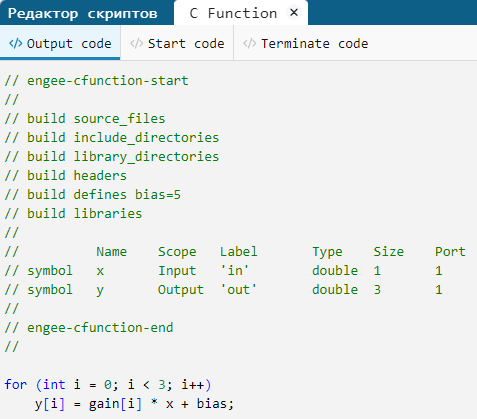
Директива // build defines задаёт идентификатор #define bias, определяющий величину смещения bias. В данном примере смещение равно 5.
Массив gain определяется в настройках блока C Function (свойство Parameters):
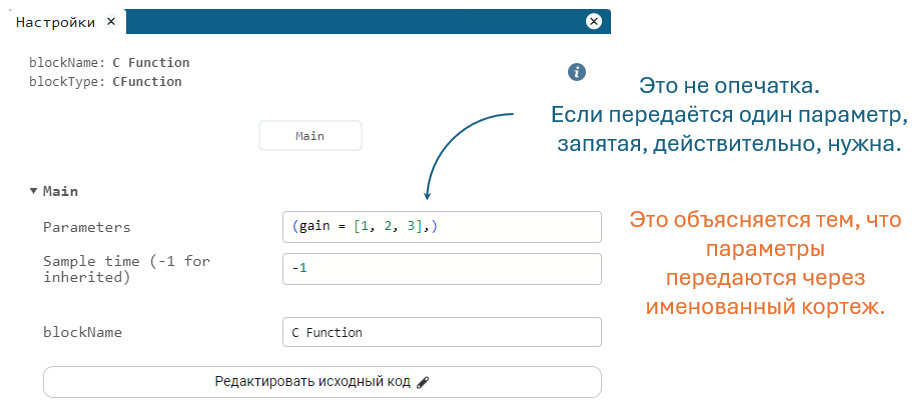
Стоит отметить, что после передачи переменной в качестве параметра она становится:
-
Глобальной - к
gainможно обратиться из любой вкладки редактора исходного кода; -
С квалификатором
const- при попытке изменения значенияgainбудет получена ошибка.
Комментарии, начинающиеся с токена // symbol, предназначены для связывания переменных исходного кода с портами блока C Function:
-
Скалярная переменная
xтипаdoubleсвязывается с первым входным портомin; -
Векторная (3 элемента) переменная
yтипаdoubleсвязывается с выходным портомout.
В цикле for (для каждого из трёх выходных сигналов) определяется значение переменной y на каждом шаге расчёта модели.
Промоделируем систему:
cCodeIntegration_basics = engee.load("$demoroot/models/cCodeIntegration_basics.engee", force = true)
simulationResults_basics = engee.run(cCodeIntegration_basics)Dict{String, DataFrames.DataFrame} with 1 entry:
"out" => 1001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_basics, force = true);Импортируем результаты моделирования:
cCodeIntegration_basics_t = simulationResults_basics["out"].time;
cCodeIntegration_basics_y1 = [y[1] for y in simulationResults_basics["out"].value];
cCodeIntegration_basics_y2 = [y[2] for y in simulationResults_basics["out"].value];
cCodeIntegration_basics_y3 = [y[3] for y in simulationResults_basics["out"].value];Построим график:
plot(cCodeIntegration_basics_t, cCodeIntegration_basics_y1)
plot!(cCodeIntegration_basics_t, cCodeIntegration_basics_y2)
plot!(cCodeIntegration_basics_t, cCodeIntegration_basics_y3)
title!("Выходной сигнал блока C Function <br> (Многомерные сигналы, параметры и #define)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")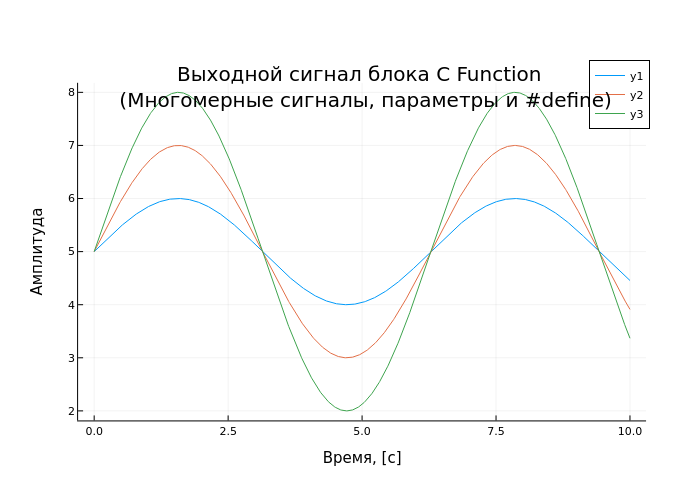
2. Использование целочисленных типов данных и статических переменных
Реализуем при помощи блока C Function простой счётчик, выходом которого будет положительное целое число, обозначающее номер текущей итерации:
Проанализируем содержимое вкладки Output code редактора исходного кода блока C Function:
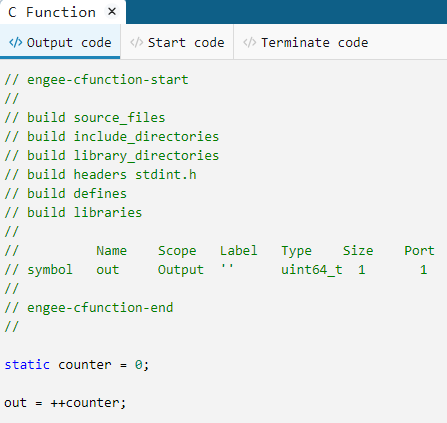
Названия целочисленных типов данных в блоке C Function задаются в соответствии с заголовочным файлом <stdint.h> стандартной библиотеки языка C. Директива // build headers подключает этот файл.
Комментарий, начинающийся с токена // symbol, предназначен для связывания 64-битовой переменной без знака out (тип задаётся как uint64_t, а не long, см. предыдущий абзац про <stdint.h>) исходного кода с выходным портом блока C Function.
Статическая переменная counter инициализируется в 0 на первом шаге симуляции, после чего на каждой итерации её значение увеличивается на 1 и присваивается переменной out.
Промоделируем систему:
cCodeIntegration_integers = engee.load("$demoroot/models/cCodeIntegration_integers.engee", force = true)
simulationResults_integers = engee.run(cCodeIntegration_integers)Dict{String, DataFrames.DataFrame} with 1 entry:
"counter" => 1001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_integers, force = true);Импортируем результаты моделирования:
cCodeIntegration_integers_t = simulationResults_integers["counter"].time;
cCodeIntegration_integers_y = simulationResults_integers["counter"].value;Построим график:
plot(cCodeIntegration_integers_t, cCodeIntegration_integers_y, legend = false)
title!("Выходной сигнал блока C Function <br> (Целочисленные типы и статические переменные)")
xlabel!("Время, [с]")
ylabel!("Номер итерации")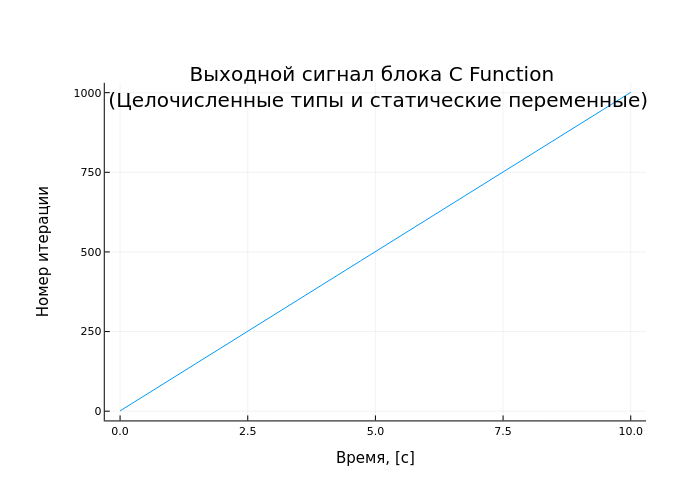
Более подробная информация о назначении вкладок редактора исходного кода, директивах блока специальных комментариев и доступных типах данных представлена в документации Engee.
Интеграция внешнего исходного кода
Постановка задачи
Рассмотрим более интересную инженерную задачу.
Предположим, что нам необходимо, учитывая шум измерений, управлять устойчивым объектом второго порядка, на который воздействуют внешние возмущения. Следовательно, нам потребуется решить задачу фильтрации выходного сигнала объекта управления, и, к счастью, в Engee есть инструмент, что отлично подходит для этого!
В файлах alphabetafilter.c и alphabetafilter.h предложена реализация альфа-бета фильтра на языке C.
Содержимое файла alphabetafilter.c:
#include "alphabetafilter.h"
#include <math.h>
double dt = 0.01;
static double xk_1, vk_1;
Parameters determineAlphaBeta(double processNoiseVariance, double measurementNoiseVariance)
{
double lambda, r;
Parameters p;
lambda = (processNoiseVariance * pow(dt, 2)) / measurementNoiseVariance;
r = (4 + lambda - sqrt(8 * lambda + pow(lambda, 2))) / 4;
p.alpha = 1 - pow(r, 2);
p.beta = 2 * (2 - p.alpha) - 4 * sqrt(1 - p.alpha);
return p;
}
double alphaBetaFilter(double value, Parameters p)
{
double xk, vk, rk;
xk = xk_1 + (vk_1 * dt);
vk = vk_1;
rk = value - xk;
xk += p.alpha * rk;
vk += (p.beta * rk) / dt;
xk_1 = xk;
vk_1 = vk;
return xk;
}
void initializeStaticVariables()
{
xk_1 = 0;
vk_1 = 0;
}Содержимое файла alphabetafilter.h:
typedef struct {
double alpha;
double beta;
} Parameters;
Parameters determineAlphaBeta(double, double);
double alphaBetaFilter(double, Parameters);
void initializeStaticVariables();Интегрируем данный исходный код в нашу модель Engee.
Анализ модели
Модель cCodeIntegration_source.engee:
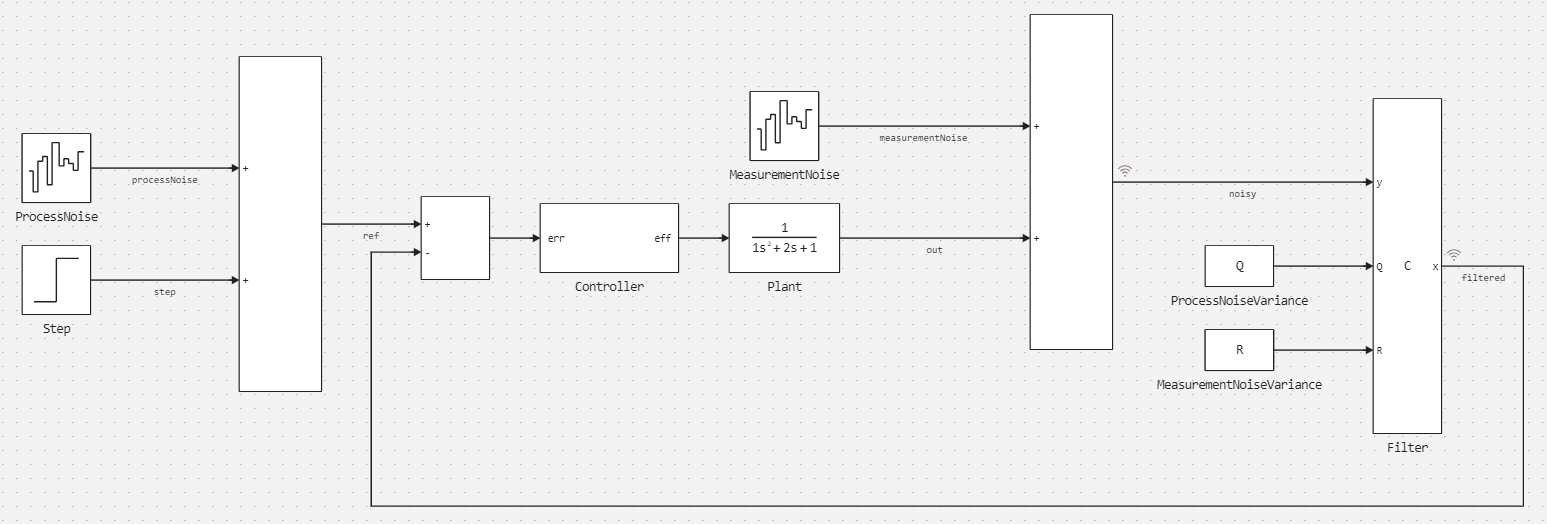
Данная модель состоит из:
-
Объекта управления
Plant; -
Подсистемы, реализующей ПИД-регулятор второго порядка
Controller; -
Блоков Band-Limited White Noise
ProcessNoiseиMeasurementNoise, моделирующих внешнее воздействие и шум измерений; -
Блока C Function
Filter, реализующего альфа-бета фильтр.
Параметр Sample Time блока Filter равен шагу решателя модели Ts:
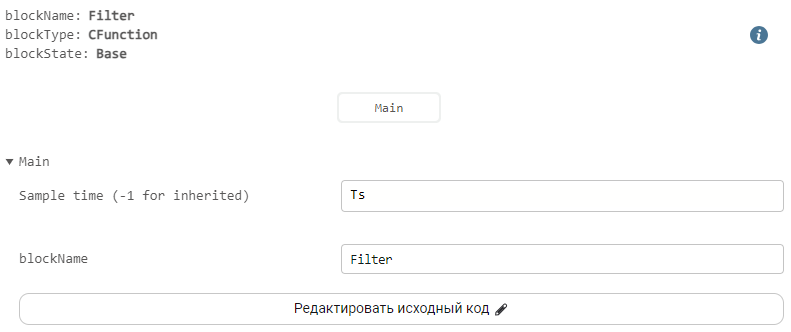
Проанализируем содержимое вкладки Output code редактора исходного кода блока Filter:
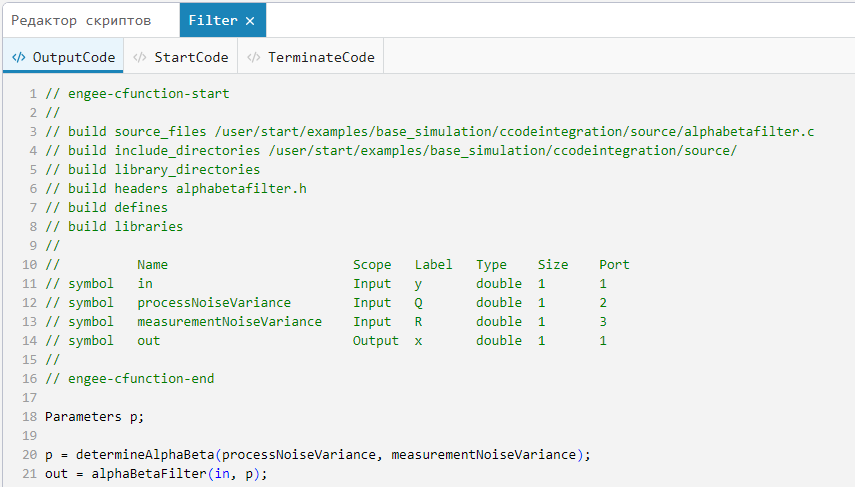
Директивы:
-
// build source_filesподключает файл исходного кодаalphabetafilter.c; -
// build include_directoriesзадаёт путь до папки, содержащей заголовочный файл; -
// build headersподключает заголовочный файлalphabetafilter.h.
Комментарии, начинающиеся с токена // symbol, связывают переменные исходного кода с входными и выходными портами блока Filter.
На каждом шаге расчёта модели последовательно вызываются функции determineAlphaBeta() и alphabetafilter(), после чего отфильтрованное значение сохраняется в переменную out, соответствующую выходному порту x блока Filter.
Запуск симуляции
Промоделируем систему:
cCodeIntegration_source = engee.load("$demoroot/models/cCodeIntegration_source.engee", force = true)
simulationResults_source = engee.run(cCodeIntegration_source)Dict{String, DataFrames.DataFrame} with 2 entries:
"filtered" => 6001×2 DataFrame…
"noisy" => 6001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_source, force = true);Результаты моделирования
Импортируем результаты моделирования:
cCodeIntegration_source_noisy_t = simulationResults_source["noisy"].time;
cCodeIntegration_source_noisy_y = simulationResults_source["noisy"].value;cCodeIntegration_source_filtered_t = simulationResults_source["filtered"].time;
cCodeIntegration_source_filtered_y = simulationResults_source["filtered"].value;Построим график:
plot(cCodeIntegration_source_noisy_t, cCodeIntegration_source_noisy_y, label = "Исходный сигнал")
plot!(cCodeIntegration_source_filtered_t, cCodeIntegration_source_filtered_y, label = "Отфильтрованный сигнал")
plot!(legend = :bottomright)
title!("Альфа-бета фильтр <br> (Интеграция внешнего исходного кода)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")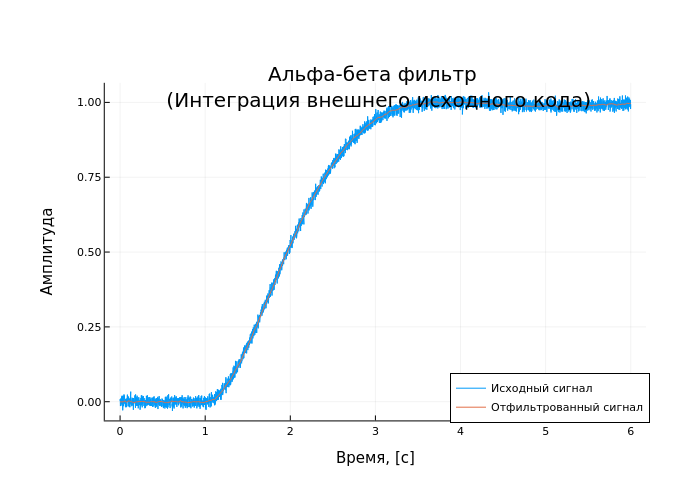
Интеграция статических и динамических библиотек
Постановка задачи
Зачастую исходный код поставляется не в явном виде, а в составе статических или динамических библиотек. Библиотеки с интерфейсом C API интегрируются в модели Engee также легко, как и внешний исходный код!
Скомпилируем статическую (alphabetafilter.a) и динамическую (alphabetafilter.so) библиотеку из файлов alphabetafilter.c и alphabetafilter.h с использованием MakeFile.
Содержимое файла Makefile:
all: alphabetafilter.a alphabetafilter.so
alphabetafilter.o: alphabetafilter.c
$(CC) -c -fPIC $^ -o $@
alphabetafilter.a: alphabetafilter.o
ar rcs $@ $^
alphabetafilter.so: alphabetafilter.o
$(CC) -shared $^ -o $@
clean:
rm -f *.o *.a *.soЗапустим компиляцию библиотек:
run(`make -C $demoroot/source`)make: Entering directory '/user/start/examples/base_simulation/ccodeintegration/source'
cc -c -fPIC alphabetafilter.c -o alphabetafilter.o
ar rcs alphabetafilter.a alphabetafilter.o
cc -shared alphabetafilter.o -o alphabetafilter.so
make: Leaving directory '/user/start/examples/base_simulation/ccodeintegration/source'Process(`make -C /user/start/examples/base_simulation/ccodeintegration/source`, ProcessExited(0))Интегрируем статическую и динамическую библиотеку в нашу модель Engee.
Статическая библиотека: Анализ модели
По своей структуре модель cCodeIntegration_library_static.engee не отличается от рассмотренной ранее cCodeIntegration_source.engee; отличаются лишь директивы блока специальных комментариев блока Filter.
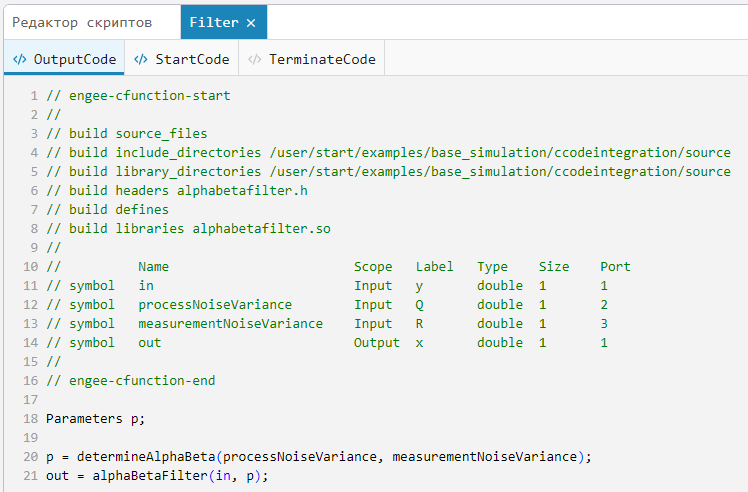
Проанализируем содержимое вкладки Output code редактора исходного кода блока Filter:
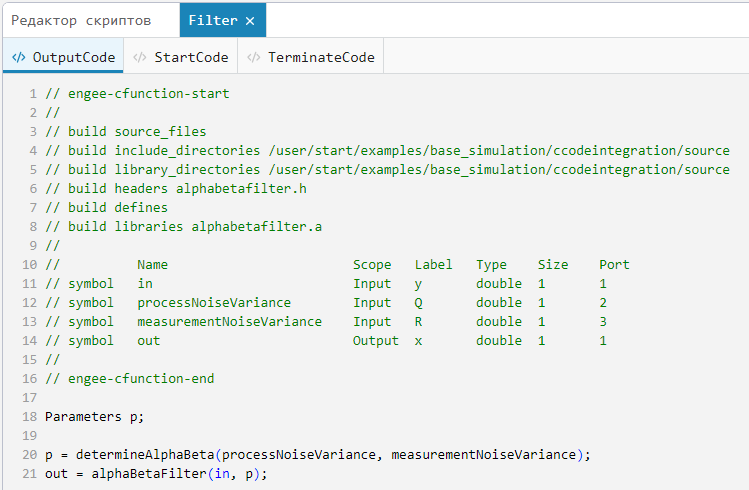
Директивы:
-
// build include_directoriesзадаёт путь до папки, содержащей заголовочный файл; -
// build library_directoriesзадаёт путь до папки, содержащей статическую библиотеку; -
// build headersподключает заголовочный файлalphabetafilter.h; -
// build librariesподключает статическую библиотекуalphabetafilter.a.
Статическая библиотека: Запуск симуляции
Промоделируем систему:
cCodeIntegration_library_static = engee.load("$demoroot/models/cCodeIntegration_library_static.engee", force = true)
simulationResults_library_static = engee.run(cCodeIntegration_library_static)Dict{String, DataFrames.DataFrame} with 2 entries:
"filtered" => 6001×2 DataFrame…
"noisy" => 6001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_library_static, force = true);Статическая библиотека: Результаты моделирования
Импортируем результаты моделирования:
cCodeIntegration_library_static_noisy_t = simulationResults_library_static["noisy"].time;
cCodeIntegration_library_static_noisy_y = simulationResults_library_static["noisy"].value;cCodeIntegration_library_static_filtered_t = simulationResults_library_static["filtered"].time;
cCodeIntegration_library_static_filtered_y = simulationResults_library_static["filtered"].value;Построим график:
plot(cCodeIntegration_library_static_noisy_t, cCodeIntegration_library_static_noisy_y, label = "Исходный сигнал")
plot!(cCodeIntegration_library_static_filtered_t, cCodeIntegration_library_static_filtered_y, label = "Отфильтрованный сигнал")
plot!(legend = :bottomright)
title!("Альфа-бета фильтр <br> (Интеграция статической библиотеки)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")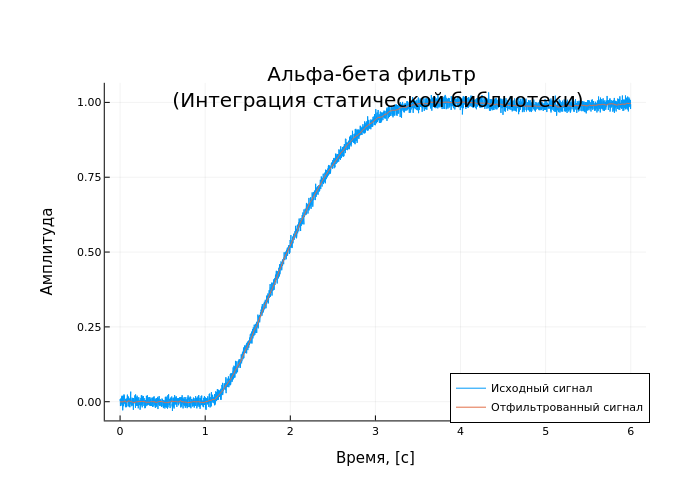
Динамическая библиотека: Анализ модели
По своей структуре модель cCodeIntegration_library_dynamic.engee не отличается от рассмотренной ранее cCodeIntegration_source.engee; отличаются лишь директивы блока специальных комментариев блока Filter.
Проанализируем содержимое вкладки Output code редактора исходного кода блока Filter:
Директивы:
-
// build include_directoriesзадаёт путь до папки, содержащей заголовочный файл; -
// build library_directoriesзадаёт путь до папки, содержащей статическую библиотеку; -
// build headersподключает заголовочный файлalphabetafilter.h; -
// build librariesподключает статическую библиотекуalphabetafilter.so.
Во вкладке Start code редактора исходного кода блока Filter выполняется вызов функции initializeStaticVariables():
Функция initializeStaticVariables() объявлена в файле alphabetafilter.h и предназначена для инициализации статических переменных xk_1 и vk_1, использующихся в динамической библиотеке. Это необходимо для того, чтобы при повтором запуске симуляции, переменные не сохраняли своё последнее рассчитанное значение, а сбрасывались к исходному (в данном случае в 0).
Динамическая библиотека: Запуск симуляции
Промоделируем систему:
cCodeIntegration_library_dynamic = engee.load("$demoroot/models/cCodeIntegration_library_dynamic.engee", force = true)
simulationResults_library_dynamic = engee.run(cCodeIntegration_library_dynamic)Dict{String, DataFrames.DataFrame} with 2 entries:
"filtered" => 6001×2 DataFrame…
"noisy" => 6001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_library_dynamic, force = true);Динамическая библиотека: Результаты моделирования
Импортируем результаты моделирования:
cCodeIntegration_library_dynamic_noisy_t = simulationResults_library_dynamic["noisy"].time;
cCodeIntegration_library_dynamic_noisy_y = simulationResults_library_dynamic["noisy"].value;cCodeIntegration_library_dynamic_filtered_t = simulationResults_library_dynamic["filtered"].time;
cCodeIntegration_library_dynamic_filtered_y = simulationResults_library_dynamic["filtered"].value;Построим график:
plot(cCodeIntegration_library_dynamic_noisy_t, cCodeIntegration_library_dynamic_noisy_y, label = "Исходный сигнал")
plot!(cCodeIntegration_library_dynamic_filtered_t, cCodeIntegration_library_dynamic_filtered_y, label = "Отфильтрованный сигнал")
plot!(legend = :bottomright)
title!("Альфа-бета фильтр <br> (Интеграция динамической библиотеки)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")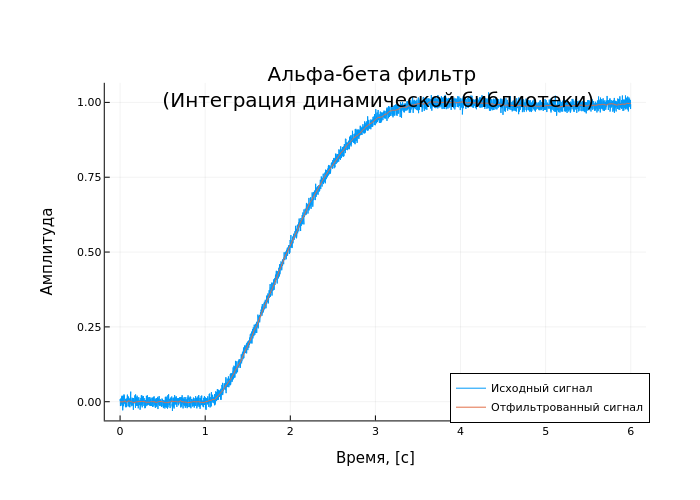
Интеграция кода, сгенерированного из модели Simulink
Постановка задачи
Сгенерируем C код из Simulink модели alphabetafilter.slx и интегрируем его в нашу модель Engee cCodeIntegration_cg_simulink.engee.
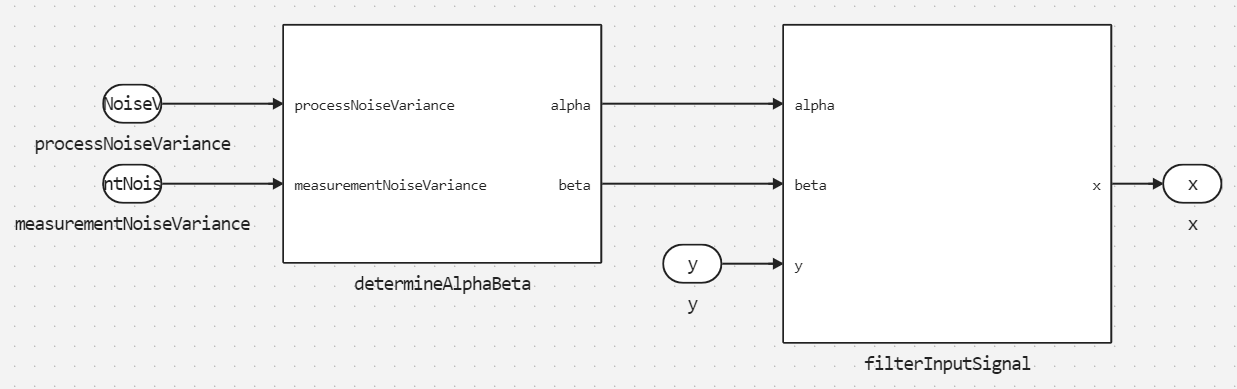
Модель alphabetafilter.slx, реализующая альфа-бета фильтр, собрана в Simulink из простых блоков и состоит из подсистем determineAlphaBeta и filterInputSignal.
Верхний уровень модели:
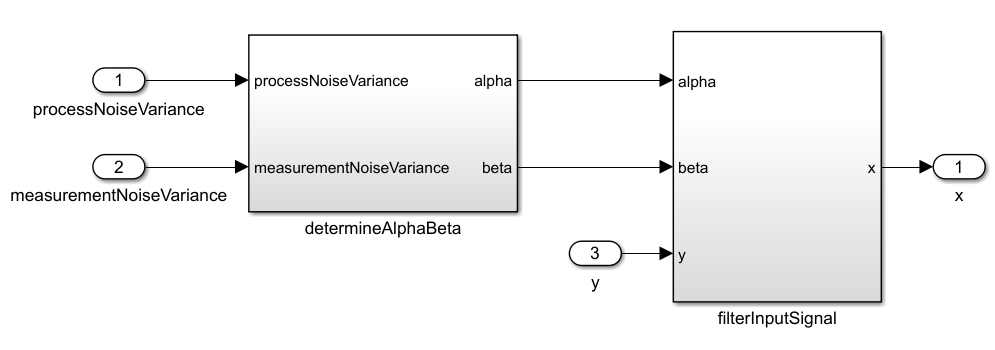
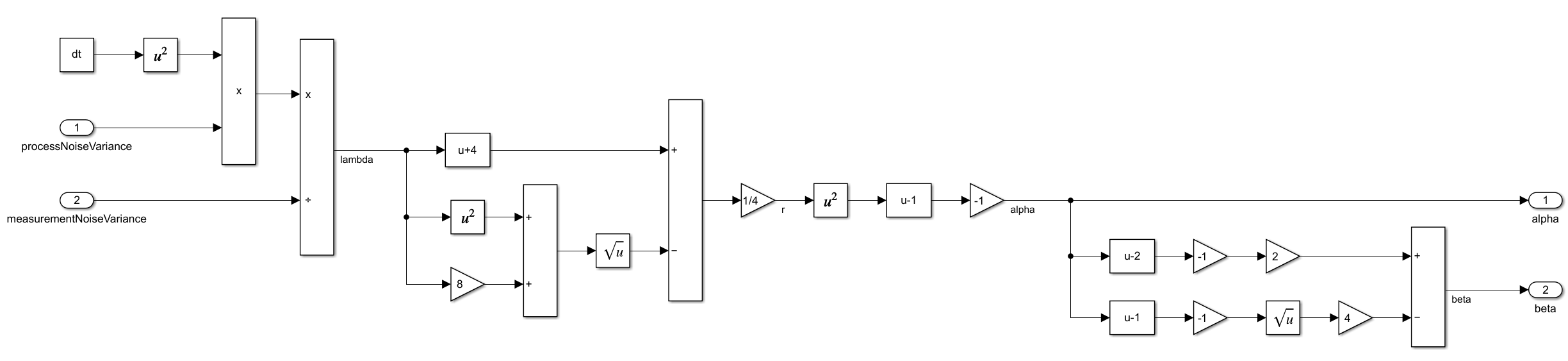
Подсистема determineAlphaBeta:
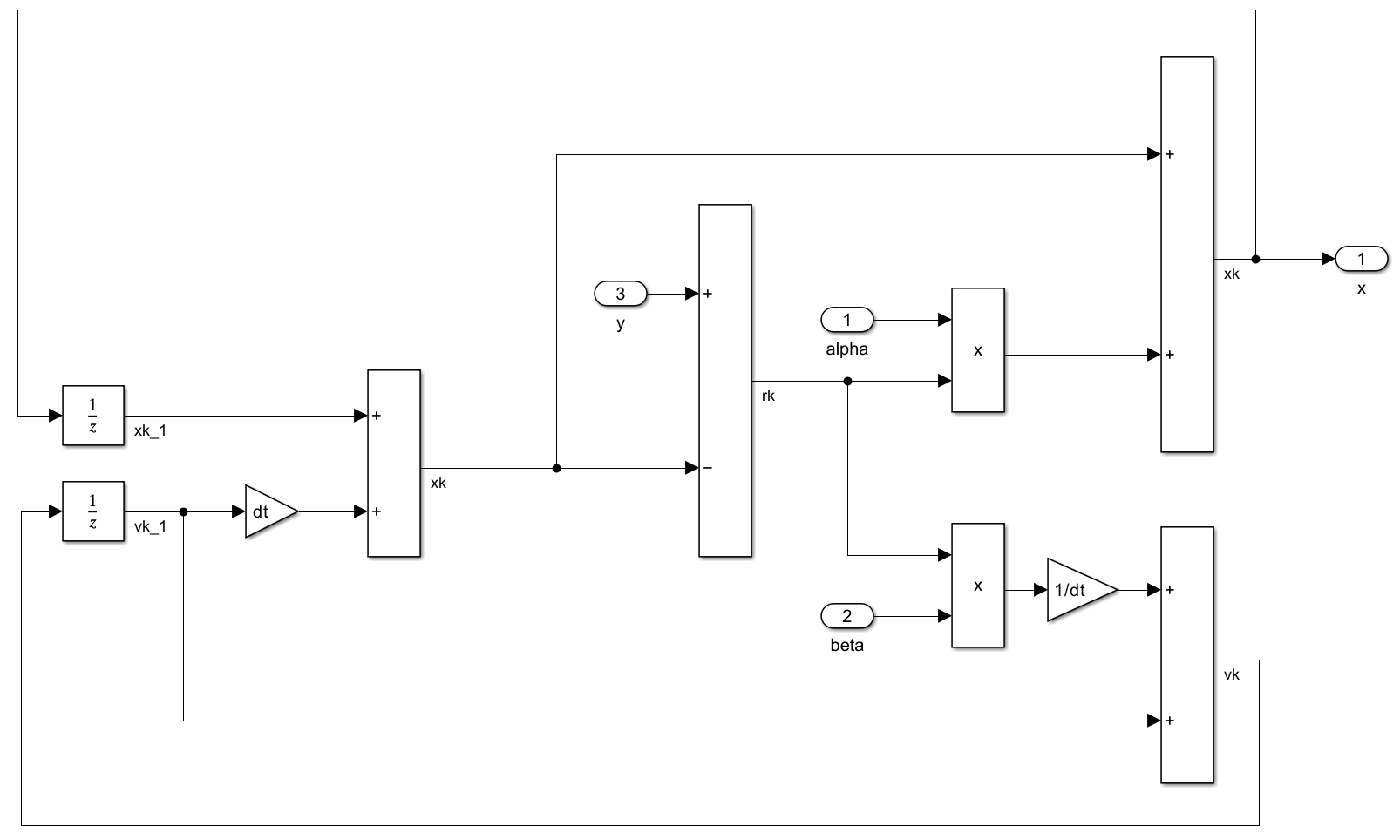
Подсистема filterInputSignal:
Сгенерируем код с использованием Simulink Embedded Coder:
cgPath = joinpath(demoroot,"cg/simulink")
cgModel = joinpath(demoroot,"cg/simulink/alphabetafilter")
mat"""
model = load_system($cgModel);
path = $cgPath;
set_param(0, 'CacheFolder', path)
set_param(0, 'CodeGenFolder', path)
slbuild(model)
set_param(0, 'CacheFolder', '')
set_param(0, 'CodeGenFolder', '')
""">> >> >> >> >> >> >> >> >> ### Starting build procedure for: alphabetafilter
### Generating code and artifacts to 'Model specific' folder structure
### Generating code into build folder: /user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw
### Invoking Target Language Compiler on alphabetafilter.rtw
### Using System Target File: /matlab/rtw/c/ert/ert.tlc
### Loading TLC function libraries
.......
### Generating TLC interface API for custom data
.
### Initial pass through model to cache user defined code
### Caching model source code
...................................
### Writing header file alphabetafilter_types.h
.
### Writing header file alphabetafilter.h
### Writing header file rtwtypes.h
### Writing source file alphabetafilter.c
### Writing header file alphabetafilter_private.h
### Writing source file alphabetafilter_data.c
.
### Writing source file ert_main.c
### TLC code generation complete (took 10.375s).
[Warning: P-code file /matlab/toolbox/coder/simulinkcoder_core/addStandardInfo.p
is older than source code file
/matlab/toolbox/coder/simulinkcoder_core/addStandardInfo.m.
/matlab/toolbox/coder/simulinkcoder_core/addStandardInfo.p may be obsolete and
may need to be regenerated.
Type "help pcode" for information about generating P-code.]
### Saving binary information cache.
### Using toolchain: GNU gcc/g++ | gmake (64-bit Linux)
### Creating '/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw/alphabetafilter.mk' ...
### Building 'alphabetafilter': "/matlab/bin/glnxa64/gmake" -f alphabetafilter.mk all
gcc -c -fwrapv -fPIC -O0 -msse2 -DCLASSIC_INTERFACE=0 -DALLOCATIONFCN=0 -DTERMFCN=1 -DONESTEPFCN=1 -DMAT_FILE=0 -DMULTI_INSTANCE_CODE=0 -DINTEGER_CODE=0 -DMT=0 -DTID01EQ=0 -DMODEL=alphabetafilter -DNUMST=1 -DNCSTATES=0 -DHAVESTDIO -DMODEL_HAS_DYNAMICALLY_LOADED_SFCNS=0 -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw -I/matlab/extern/include -I/matlab/simulink/include -I/matlab/rtw/c/src -I/matlab/rtw/c/src/ext_mode/common -I/matlab/rtw/c/ert -o "alphabetafilter.o" "/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw/alphabetafilter.c"
gcc -c -fwrapv -fPIC -O0 -msse2 -DCLASSIC_INTERFACE=0 -DALLOCATIONFCN=0 -DTERMFCN=1 -DONESTEPFCN=1 -DMAT_FILE=0 -DMULTI_INSTANCE_CODE=0 -DINTEGER_CODE=0 -DMT=0 -DTID01EQ=0 -DMODEL=alphabetafilter -DNUMST=1 -DNCSTATES=0 -DHAVESTDIO -DMODEL_HAS_DYNAMICALLY_LOADED_SFCNS=0 -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw -I/matlab/extern/include -I/matlab/simulink/include -I/matlab/rtw/c/src -I/matlab/rtw/c/src/ext_mode/common -I/matlab/rtw/c/ert -o "alphabetafilter_data.o" "/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw/alphabetafilter_data.c"
gcc -c -fwrapv -fPIC -O0 -msse2 -DCLASSIC_INTERFACE=0 -DALLOCATIONFCN=0 -DTERMFCN=1 -DONESTEPFCN=1 -DMAT_FILE=0 -DMULTI_INSTANCE_CODE=0 -DINTEGER_CODE=0 -DMT=0 -DTID01EQ=0 -DMODEL=alphabetafilter -DNUMST=1 -DNCSTATES=0 -DHAVESTDIO -DMODEL_HAS_DYNAMICALLY_LOADED_SFCNS=0 -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink -I/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw -I/matlab/extern/include -I/matlab/simulink/include -I/matlab/rtw/c/src -I/matlab/rtw/c/src/ext_mode/common -I/matlab/rtw/c/ert -o "ert_main.o" "/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter_ert_rtw/ert_main.c"
### Creating standalone executable ../alphabetafilter ...
g++ -o ../alphabetafilter alphabetafilter.o alphabetafilter_data.o ert_main.o
### Created: ../alphabetafilter
### Successfully generated all binary outputs.
gmake: Nothing to be done for `all'.
### Successful completion of build procedure for: alphabetafilter
### Simulink cache artifacts for 'alphabetafilter' were created in '/user/start/examples/base_simulation/ccodeintegration/cg/simulink/alphabetafilter.slxc'.
Build Summary
Top model targets built:
Model Action Rebuild Reason
=================================================================================================
alphabetafilter Code generated and compiled. Code generation information file does not exist.
1 of 1 models built (0 models already up to date)
Build duration: 0h 0m 36.011sАнализ модели
По своей структуре модель cCodeIntegration_cg_simulink.engee не отличается от рассмотренной ранее cCodeIntegration_source.engee; отличается лишь содержимое вкладок редактора исходного исходного кода блока Filter.
Проанализируем содержимое вкладки Output code редактора исходного кода блока Filter:
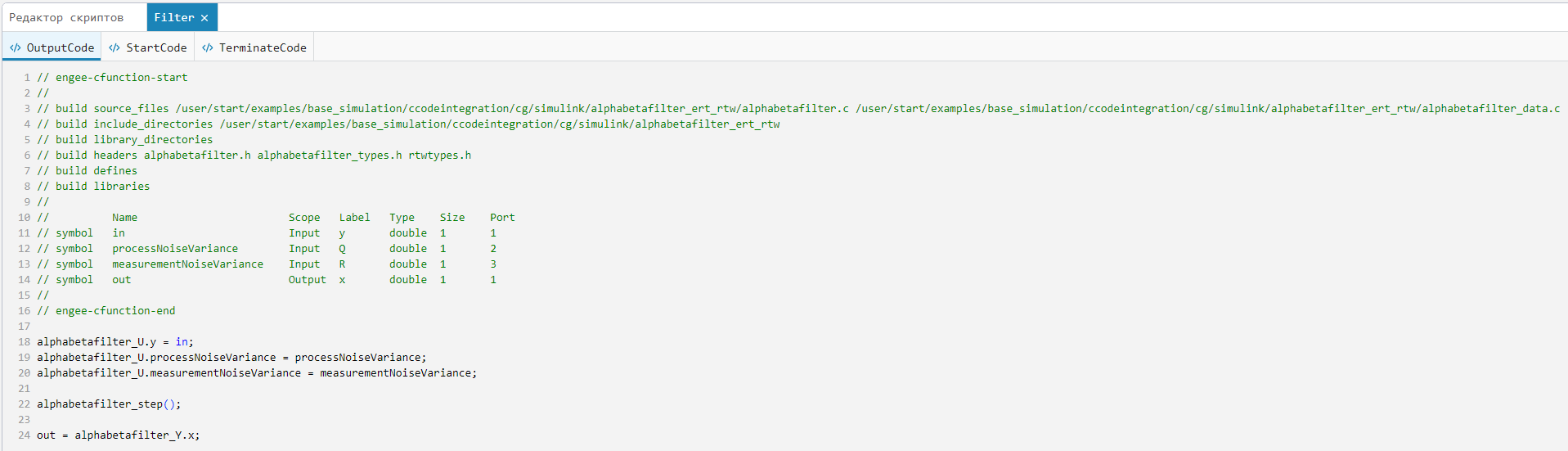
Директивы:
-
// build source_filesподключает файлы исходного кодаalphabetafilter.cиalphabetafilter_data.c; -
// build include_directoriesзадаёт путь до папки, содержащей заголовочные файлы; -
// build headersподключает заголовочные файлыalphabetafilter.h,alphabetafilter_types.hиrtwtypes.h.
На каждом шаге расчёта модели выполняется:
-
Инициализация структуры
alphabetafilter_Uпеременнымиin,processNoiseVarianceиmeasurementNoiseVariance(входные сигналы); -
Вызов функции
alphabetafilter_step(); -
Присваивание переменной
out(выходной сигнал) результатаx, сохранённого в структуреalphabetafilter_Y.
Во вкладке Start code редактора исходного кода блока Filter выполняется вызов функции alphabetafilter_initialize():
Во вкладке Terminate code редактора исходного кода блока Filter выполняется вызов функции alphabetafilter_terminate():
Запуск симуляции
Промоделируем систему:
cCodeIntegration_cg_simulink = engee.load("$demoroot/models/cCodeIntegration_cg_simulink.engee", force = true)
simulationResults_cg_simulink = engee.run(cCodeIntegration_cg_simulink)Dict{String, DataFrames.DataFrame} with 2 entries:
"filtered" => 6001×2 DataFrame…
"noisy" => 6001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_cg_simulink, force = true);Результаты моделирования
Импортируем результаты моделирования:
cCodeIntegration_cg_simulink_noisy_t = simulationResults_cg_simulink["noisy"].time;
cCodeIntegration_cg_simulink_noisy_y = simulationResults_cg_simulink["noisy"].value;cCodeIntegration_cg_simulink_filtered_t = simulationResults_cg_simulink["filtered"].time;
cCodeIntegration_cg_simulink_filtered_y = simulationResults_cg_simulink["filtered"].value;Построим график:
plot(cCodeIntegration_cg_simulink_noisy_t, cCodeIntegration_cg_simulink_noisy_y, label = "Исходный сигнал")
plot!(cCodeIntegration_cg_simulink_filtered_t, cCodeIntegration_cg_simulink_filtered_y, label = "Отфильтрованный сигнал")
plot!(legend = :bottomright)
title!("Альфа-бета фильтр <br> (Интеграция кода, сгенерированного из модели Simulink)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")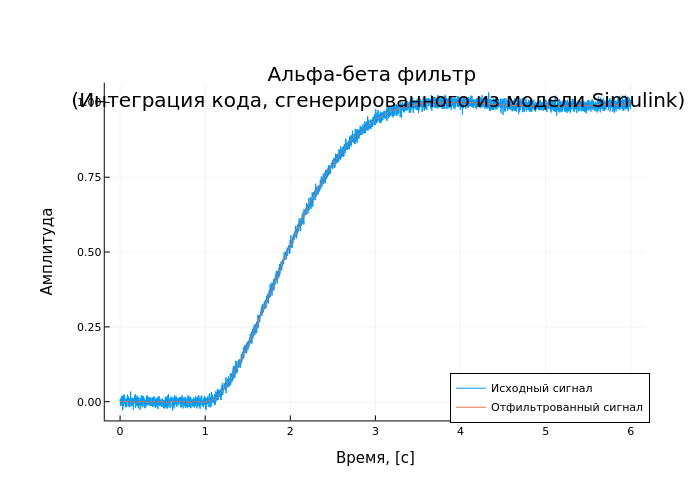
Интеграция кода, сгенерированного из модели Engee
Постановка задачи
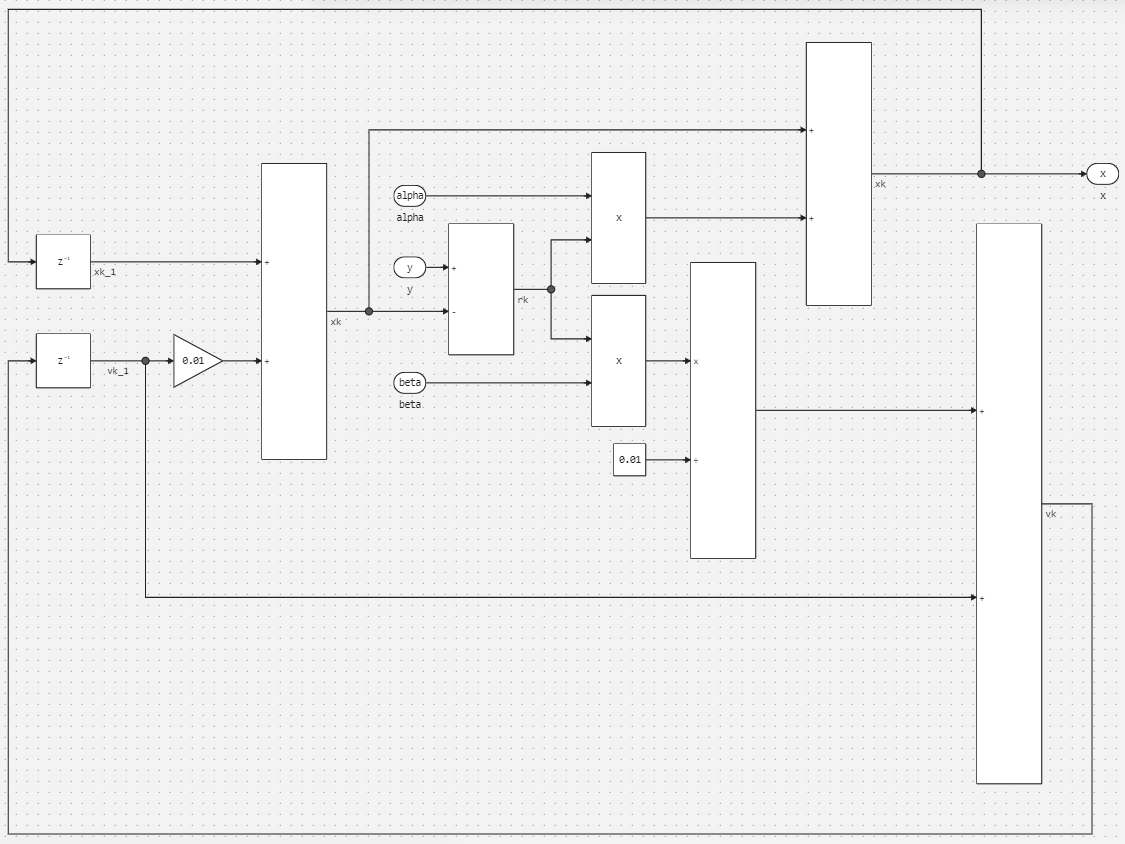
Сгенерируем C код из модели Engee alphabetafilter.engee, собранной из простых блоков и реализующей альфа-бета фильтр, и интегрируем его в нашу модель Engee cCodeIntegration_cg_engee.engee.
Верхний уровень модели:
Подсистема determineAlphaBeta:
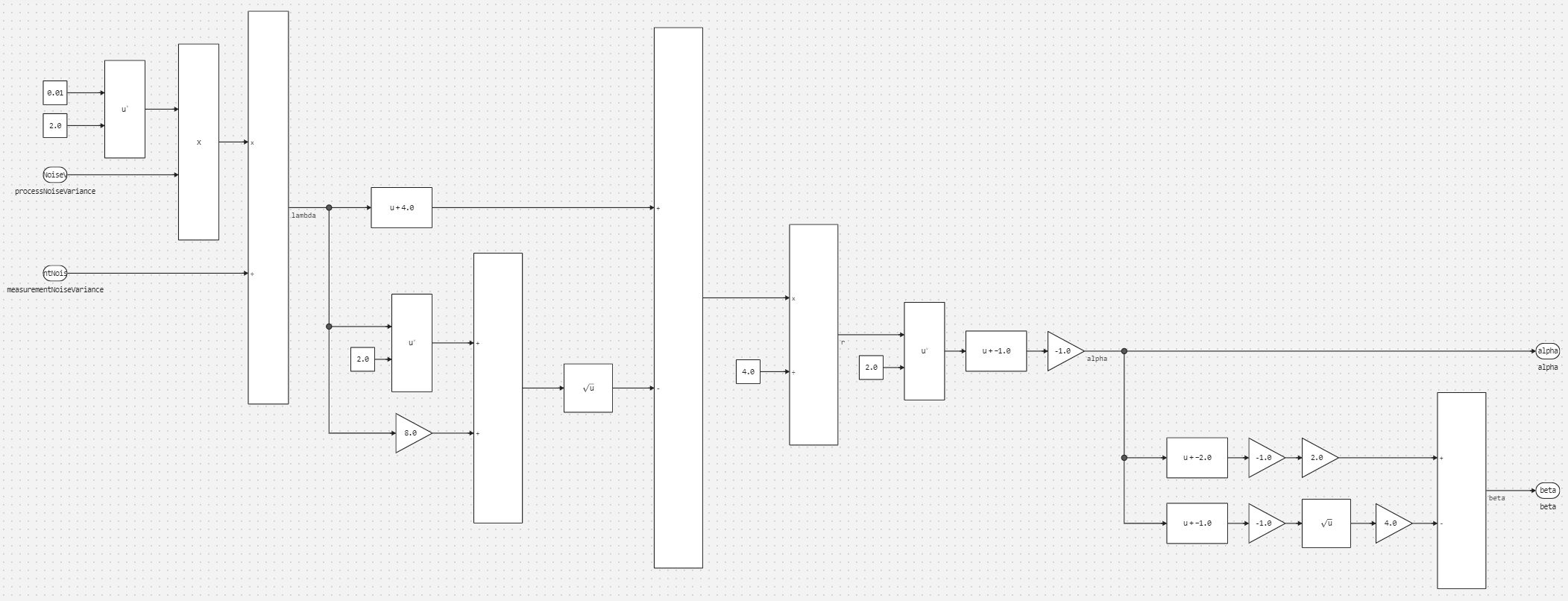
Подсистема filterInputSignal:
Сгенерируем код с использованием генератора кода Engee:
engee.generate_code("$demoroot/cg/engee/alphabetafilter.engee", "$demoroot/cg/engee/alphabetafilter_cg")"Created directory - /user/start/examples/base_simulation/ccodeintegration/cg/engee/alphabetafilter_cg"Анализ модели
По своей структуре модель cCodeIntegration_cg_engee.engee не отличается от рассмотренной ранее cCodeIntegration_source.engee; отличается лишь содержимое вкладок редактора исходного исходного кода блока Filter.
Проанализируем содержимое вкладки Output code редактора исходного кода блока Filter:
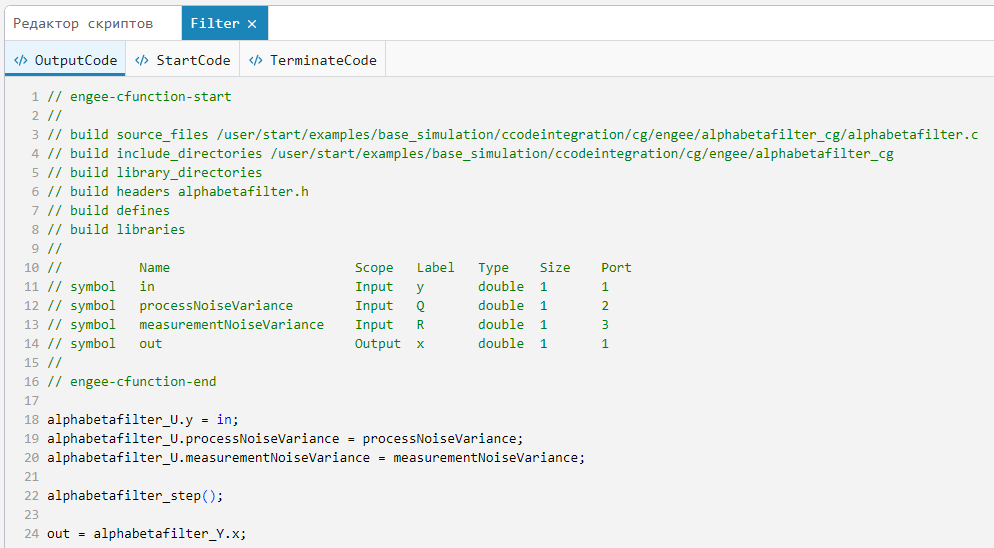
Директивы:
-
// build source_filesподключает файл исходного кодаalphabetafilter.c; -
// build include_directoriesзадаёт путь до папки, содержащей заголовочные файлы; -
// build headersподключает заголовочный файлalphabetafilter.h.
На каждом шаге расчёта модели выполняется:
-
Инициализация структуры
alphabetafilter_Uпеременнымиin,processNoiseVarianceиmeasurementNoiseVariance(входные сигналы); -
Вызов функции
alphabetafilter_step(); -
Присваивание переменной
out(выходной сигнал) результатаx, сохранённого в структуреalphabetafilter_Y.
Во вкладке Start code редактора исходного кода блока Filter выполняется вызов функции alphabetafilter_init():
Во вкладке Terminate code редактора исходного кода блока Filter выполняется вызов функции alphabetafilter_term():
Запуск симуляции
Промоделируем систему:
cCodeIntegration_cg_engee = engee.load("$demoroot/models/cCodeIntegration_cg_engee.engee", force = true)
simulationResults_cg_engee = engee.run(cCodeIntegration_cg_engee)Dict{String, DataFrames.DataFrame} with 2 entries:
"filtered" => 6001×2 DataFrame…
"noisy" => 6001×2 DataFrame…Закроем модель:
engee.close(cCodeIntegration_cg_engee, force = true);Результаты моделирования
Импортируем результаты моделирования:
cCodeIntegration_cg_engee_noisy_t = simulationResults_cg_engee["noisy"].time;
cCodeIntegration_cg_engee_noisy_y = simulationResults_cg_engee["noisy"].value;cCodeIntegration_cg_engee_filtered_t = simulationResults_cg_engee["filtered"].time;
cCodeIntegration_cg_engee_filtered_y = simulationResults_cg_engee["filtered"].value;Построим график:
plot(cCodeIntegration_cg_engee_noisy_t, cCodeIntegration_cg_engee_noisy_y, label = "Исходный сигнал")
plot!(cCodeIntegration_cg_engee_filtered_t, cCodeIntegration_cg_engee_filtered_y, label = "Отфильтрованный сигнал")
plot!(legend = :bottomright)
title!("Альфа-бета фильтр <br> (Интеграция кода, сгенерированного из модели Engee)")
xlabel!("Время, [с]")
ylabel!("Амплитуда")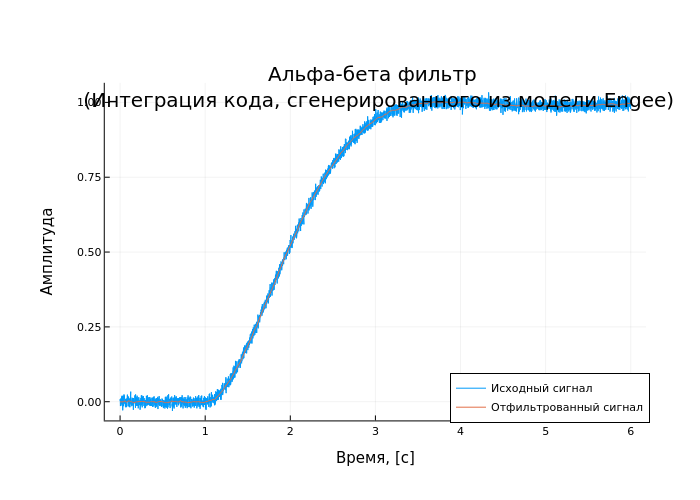
Выводы
Данный пример демонстрирует особенности использования блока C Function и различные способы интеграции C кода в модели Engee:
-
Интеграцию внешнего исходного кода;
-
Интеграцию статических и динамических библиотек;
-
Интеграцию кода, сгенерированного из модели Simulink;
-
Интеграцию кода, сгенерированного из модели Engee.