Анализ пружинной демпферной системы
Схема системы представлена на рисунке ниже.
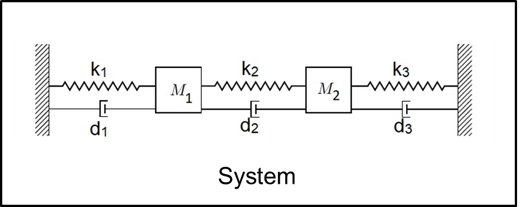
Реализация будет включать в себя три подсистемы:
-
масса-1, пружина-1, дампер-1.
-
пружина-2, дампер-2.
-
масса-2, пружина-3, дампер-3.
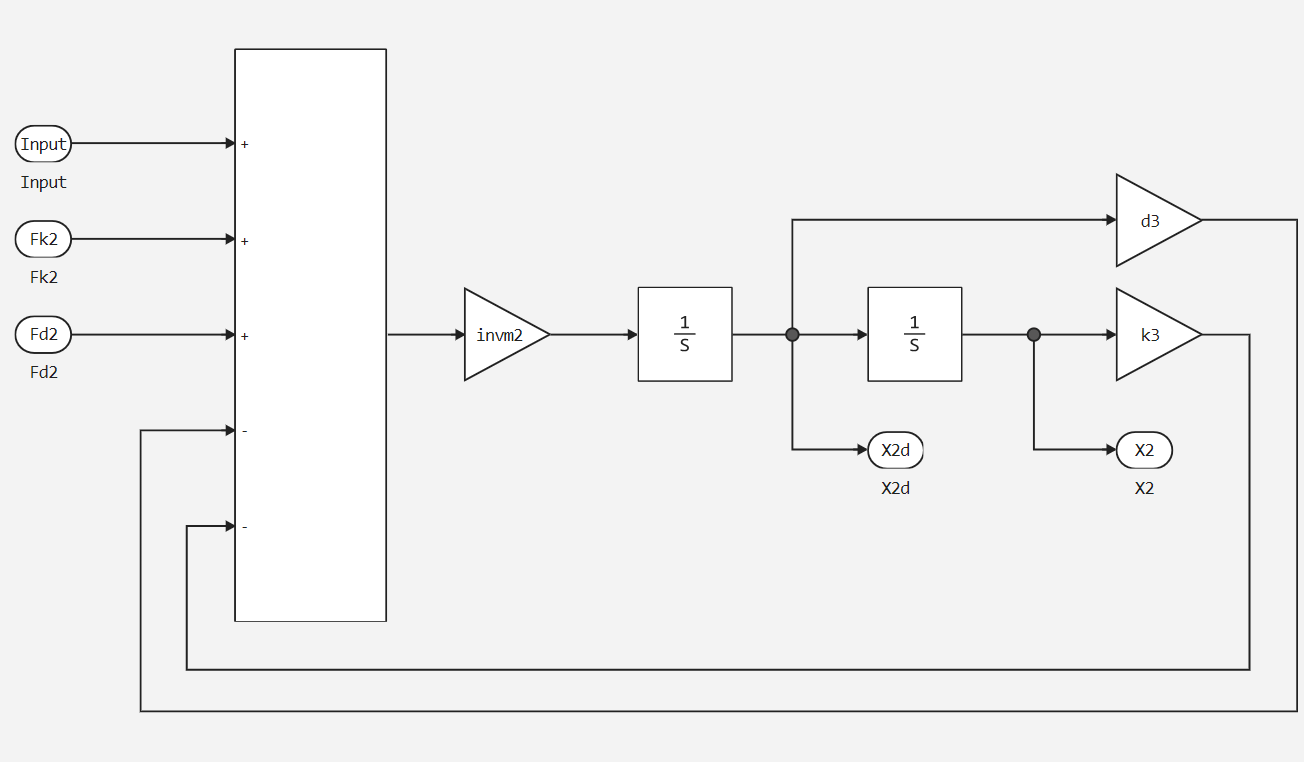
На рисунке ниже показан верхний уровень реализованной системы.
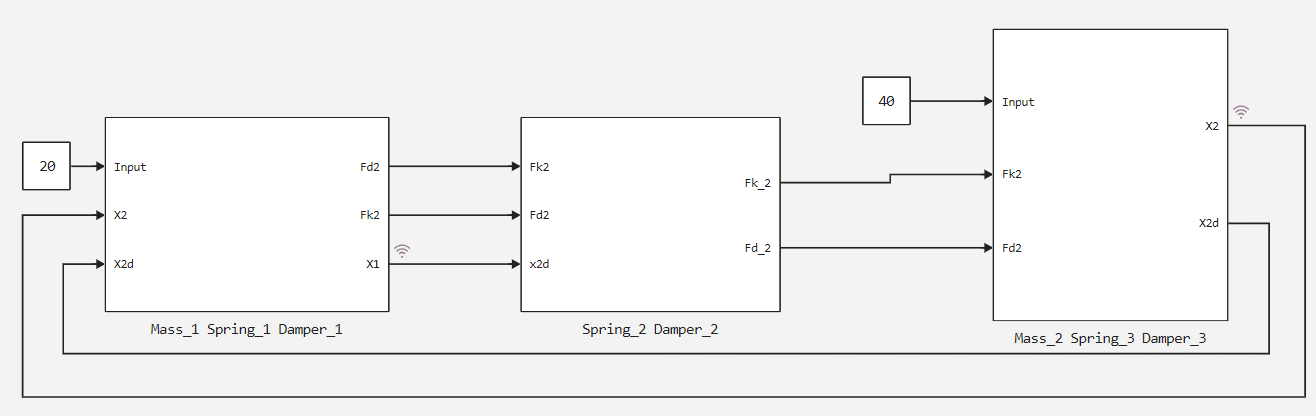
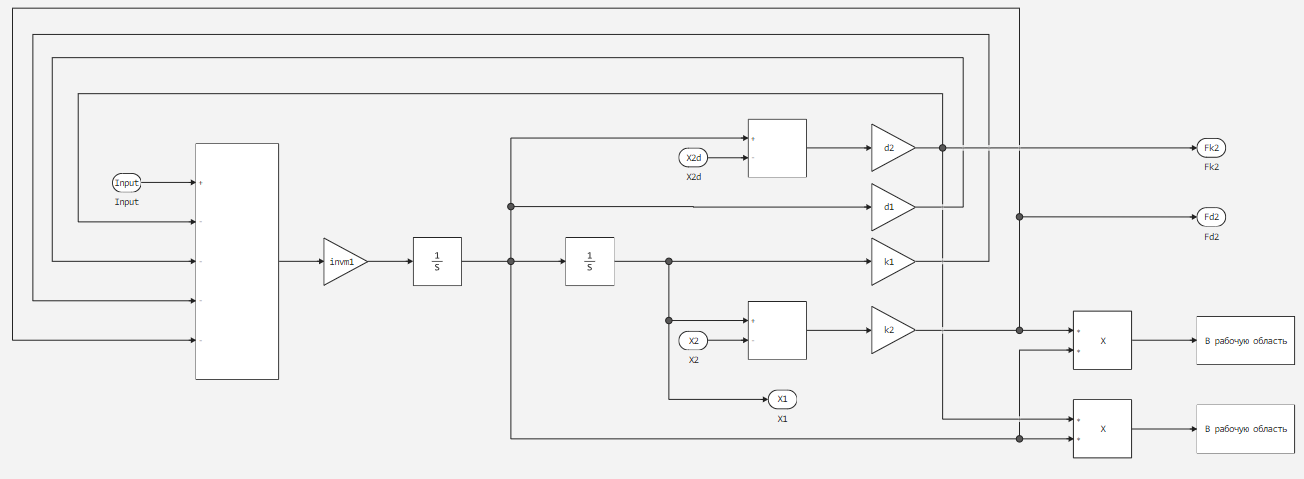
Также ниже продемонстрировано содержимое всех подсистем модели в их хронологическом порядке. Первая – это Mass_1 Spring_1 Damper_1.
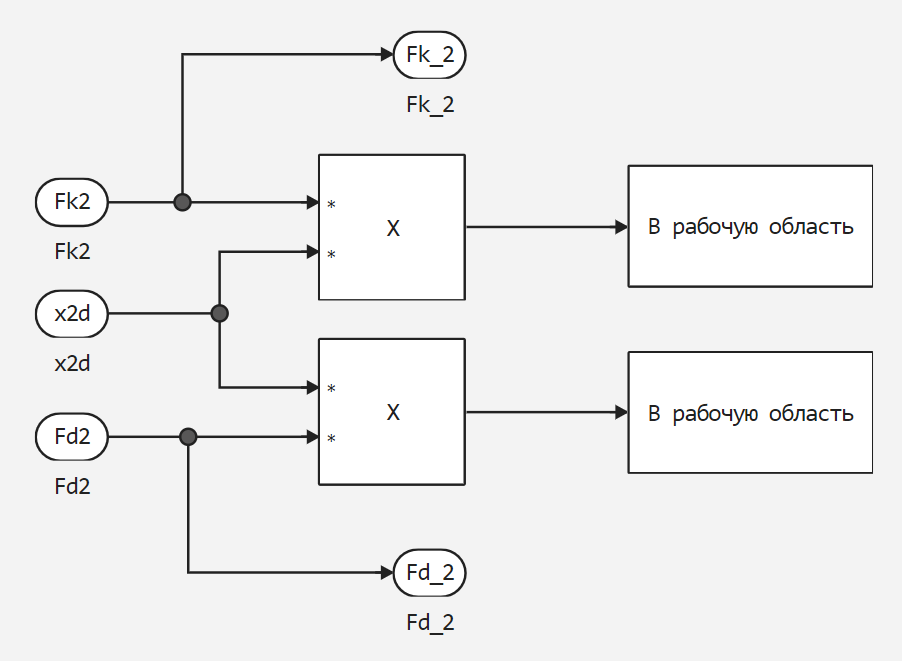
Вторая – Spring_2 Damper_2.
И третья – Mass_2 Spring_3 Damper_3.
Теперь перейдём к объявлению параметров этих систем.
# Определение масс тел
m1 = 20;
m2 = 10;
# Расчёт обратной дроби от массы тел
invm1 = 1/m1;
invm2 = 1/m2;
# Определение коэффициентов гашения демпферов
d1 = 0.5;
d2 = 0.2;
d3 = 2;
# Коэффициенты упругости пружин
k1 = 5;
k2 = 3;
k3 = 2;
# Начальные состояния интеграторов для первой и третьей подсистем
init_integrator_1 = 0.0001;
init_integrator_3 = 0;
# Входные силы воздействия
F1 = 20;
F2 = 40;Запустим модель с нашими параметрами.
function run_model( name_model, path_to_folder )
Path = path_to_folder * "/" * name_model * ".engee"
if name_model in [m.name for m in engee.get_all_models()] # Проверка условия загрузки модели в ядро
model = engee.open( name_model ) # Открыть модель
model_output = engee.run( model, verbose=true ); # Запустить модель
else
model = engee.load( Path, force=true ) # Загрузить модель
model_output = engee.run( model, verbose=true ); # Запустить модель
engee.close( name_model, force=true ); # Закрыть модель
end
return model_output
endrun_model (generic function with 1 method)run_model( "PowerAnalysis", @__DIR__ )Building...
Progress 0%
Progress 0%
Progress 5%
Progress 10%
Progress 15%
Progress 20%
Progress 25%
Progress 30%
Progress 35%
Progress 40%
Progress 45%
Progress 50%
Progress 55%
Progress 60%
Progress 65%
Progress 70%
Progress 75%
Progress 80%
Progress 85%
Progress 90%
Progress 95%
Progress 100%Dict{String, DataFrame} with 4 entries:
"Mass_1_Spring_1_Damper_1.X1" => 10001×2 DataFrame…
"Mass_2_Spring_3_Damper_3.X2" => 10001×2 DataFrame…
"Product-1.1" => 20002×2 DataFrame…
"Product.1" => 20002×2 DataFrame…В данной демонстрации выходные сигналы, описывающие колебательные процессы масс, логируются не через To Workspace, а через логирования шины. Поэтому при запуске модели мы видим, что было создано несколько переменных с названием подсистемы и именем выходного порта, которые хранятся в структуре simout. Если во время симуляции логируется больше четырех сигналов, все их имена можно просмотреть, наведя курсор на переменную simout. 
# Считывание из simout залогированных сигналов
X1 = simout["PowerAnalysis/Mass_1_Spring_1_Damper_1.X1"];
X1 = collect(X1);
X2 = simout["PowerAnalysis/Mass_2_Spring_3_Damper_3.X2"];
X2 = collect(X2);X1[1:3,:]3×2 DataFrame
Row │ time value
│ Any Any
─────┼───────────────────
1 │ 0.0 0.0001
2 │ 0.01 0.000200998
3 │ 0.02 0.000501961Как мы видим поле считывания данных, из simout мы получаем структуру DataFrames, содержащую поля временных отметок и данных. Аналогичную структуру мы получаем при чтении WorkspaceArray.
Теперь построим сравнительный график колебаний двух тел из нашей модели. В данном случае из суммы сил воздействия при отношении к массе тела мы получаем ускорение. Далее за счёт интегрирования рассчитываем скорость. И за счёт второго интегрирования мы получаем перемещение, которое в свою очередь и логируем.
using Plots # Подключения библиотеки построения графиков
plotly()Plots.PlotlyBackend()plot(X1.time,X1.value) # Первое тело
plot!(X2.time,X2.value) # Второе тело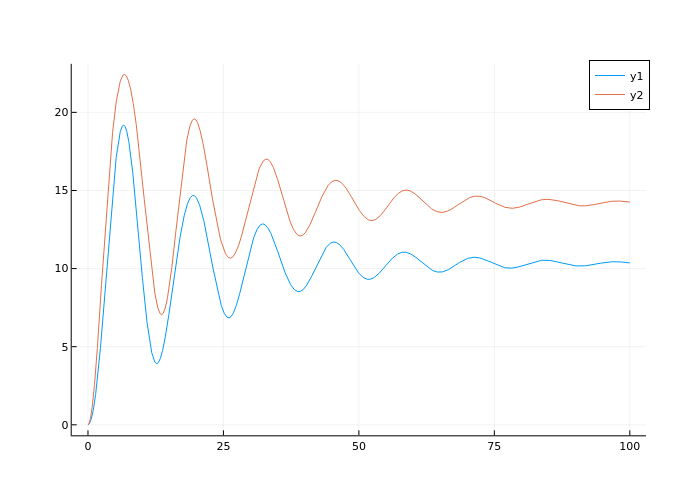
Как мы видим из графика, колебания первого тела интенсивнее второго. Это связано в первую очередь с тем, что масса первого тела в два раза больше массы второго тела.
Также во время моделирования мы логировали мощности демпферов и пружин. Проанализируем эти данные.
Мощность рассчитывается через произведение силы на скорости.
# Демпфер
Fd2x1d = simout["PowerAnalysis/Mass_1_Spring_1_Damper_1/Product.1"];
Fd2x1d = collect(Fd2x1d);Построим график.
plot( Fd2x1d.time, Fd2x1d.value )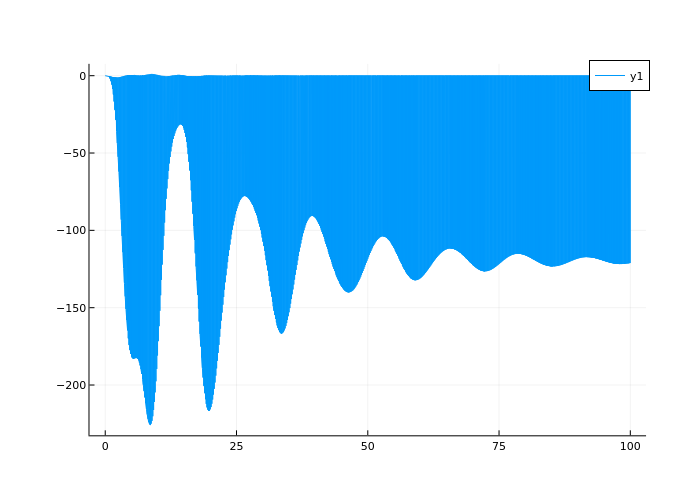
На этих двух графиках мы видим перепады мощности для первой пружины и первого демпфера.