Моделирование подвески автомобиля
В данном примере будет продемонстрировано моделирование упрощенной подвески автомобиля, которая состоит из независимых передней и задней вертикальных подвесок. Модель включает в себя расчёт наклона кузова.
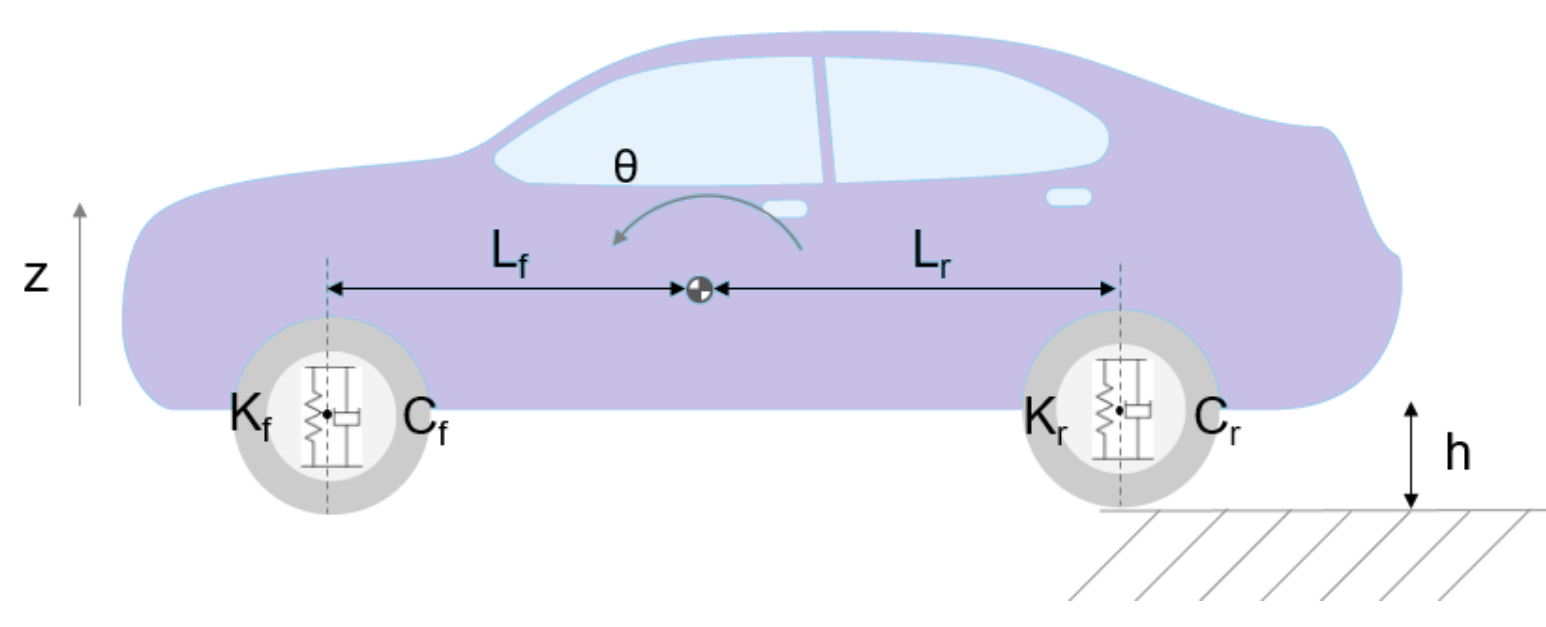
Схема подвески модели автомобиля:
Общий вид модели подвески автомобиля:
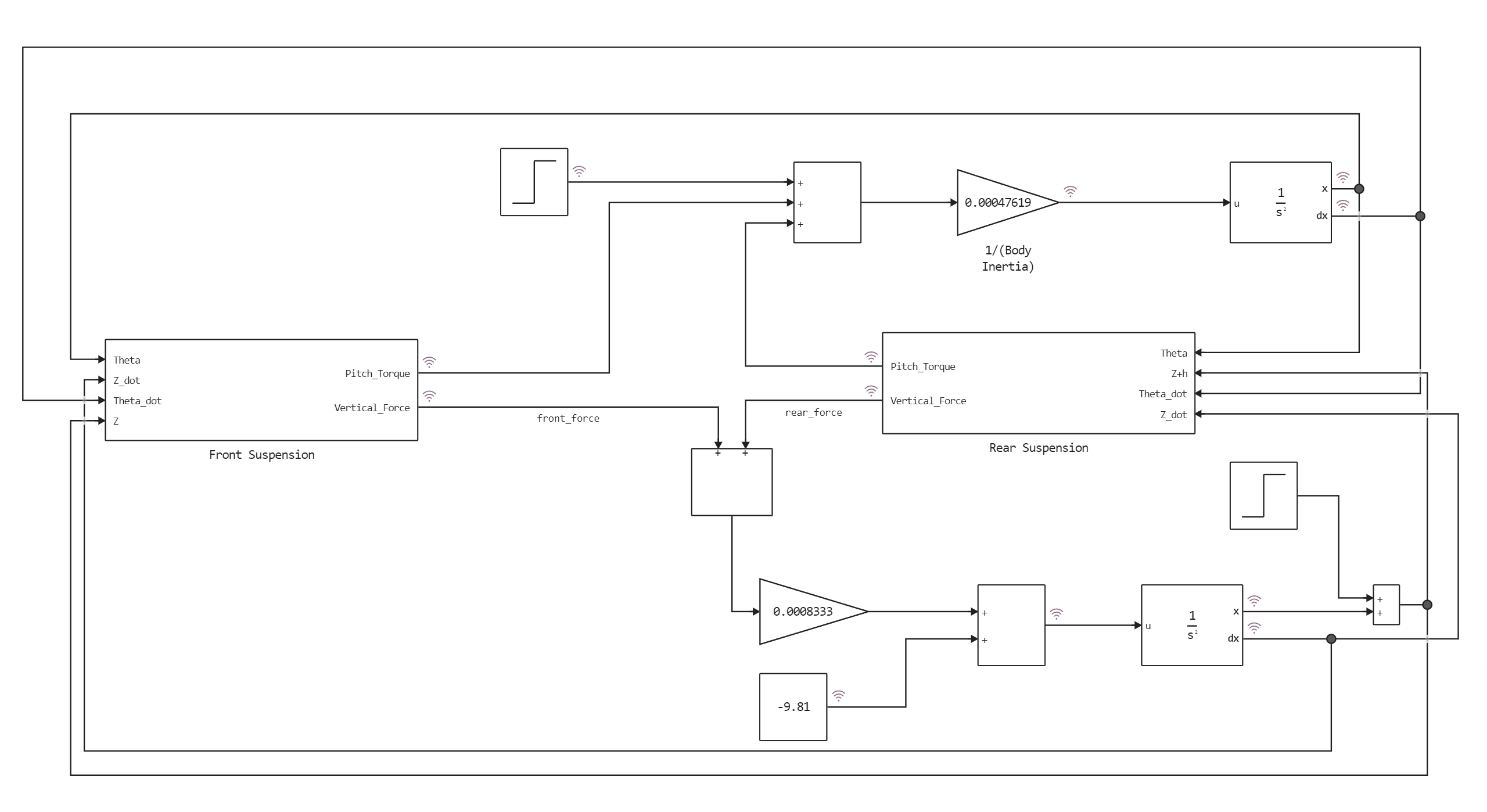
На рисунке показаны смоделированные характеристики полукара. Передняя и задняя подвески смоделированы как пружинно-амортизаторные системы. Более подробная модель включала бы модель шины и нелинейности демпфера, такие как зависящее от скорости демпфирование (при этом демпфирование при отскоке больше, чем при сжатии). Кузов транспортного средства имеет степени свободы наклона и отскока. Они представлены в модели четырьмя состояниями: вертикальное смещение, вертикальная скорость, угловое смещение по тангажу и угловая скорость по тангажу. Полная модель с шестью степенями свободы может быть реализована с использованием блоков векторной алгебры для выполнения преобразований осей и расчетов силы/перемещения/скорости. Блок уравнений 1 описывает влияние передней подвески на отскок (т.е. вертикальную степень свободы).:
где:
Блок уравнений 2 описывают моменты качки, обусловленные подвеской.
где:
Блок уравнений 3 разрешают силы и моменты, возникающие при движении тела, согласно Второму закону Ньютона:
где:
Загрузка и запуск симуляции
Подключение бэкенда - метода этображения графики:
using Plots
gr();Загрузка и запуск модели:
try
engee.close("suspension", force=true) # закрытие модели
catch err # в случае, если нет модели, которую нужно закрыть и engee.close() не выполняется, то будет выполнена её загрузка после catch
m = engee.load("/user/start/examples/controls/suspension/suspension.engee") # загрузка модели
end;
try
engee.run(m, verbose=true) # запуск модели
catch err # в случае, если модель не загружена и engee.run() не выполняется, то будут выполнены две нижние строки после catch
m = engee.load("/user/start/examples/controls/suspension/suspension.engee") # загрузка модели
engee.run(m, verbose=true) # запуск модели
endBuilding...
Progress 100%Dict{String, DataFrames.DataFrame} with 6 entries:
"Скорость изменения угла наклона" => 1001×2 DataFrame…
"Торможение.1" => 1001×2 DataFrame…
"Угол наклона" => 1001×2 DataFrame…
"Усилие на задней оси" => 1001×2 DataFrame…
"Препятствие.1" => 1001×2 DataFrame…
"Усилие на передней оси" => 1001×2 DataFrame…Обработка результатов
Выделение из переменной simout данных, описывающих тормозной путь и скольжение:
sleep(5)
data = collect(simout)6-element Vector{WorkspaceArray}:
WorkspaceArray("suspension/Торможение.1")
WorkspaceArray("suspension/Препятствие.1")
WorkspaceArray("suspension/Усилие на передней оси")
WorkspaceArray("suspension/Скорость изменения угла наклона")
WorkspaceArray("suspension/Усилие на задней оси")
WorkspaceArray("suspension/Угол наклона")Определение данных из модели в соответствующие переменные:
stop_signal = collect(data[1])
barrier_signal = collect(data[2])
front_force = collect(data[3])
angle_speed = collect(data[4])
rear_force = collect(data[5])
angle = collect(data[6]);Визуализация результатов моделирования:
p1 = plot(stop_signal[:,1], stop_signal[:,2], title="Сигнал торможения")
p2 = plot(barrier_signal[:,1], barrier_signal[:,2], title="Сигнал препятствия")
p3 = plot(front_force[:,1], front_force[:,2], title="Усилие на передней оси")
p4 = plot(angle_speed[:,1], angle_speed[:,2], title="Скорость изменения \n угла наклона")
p5 = plot(rear_force[:,1], rear_force[:,2], title="Усилие на задней оси")
p6 = plot(angle[:,1], angle[:,2], title="Угол наклона")
plot(p1, p2, p3, p4, p5, p6, layout=(3, 2), legend=false)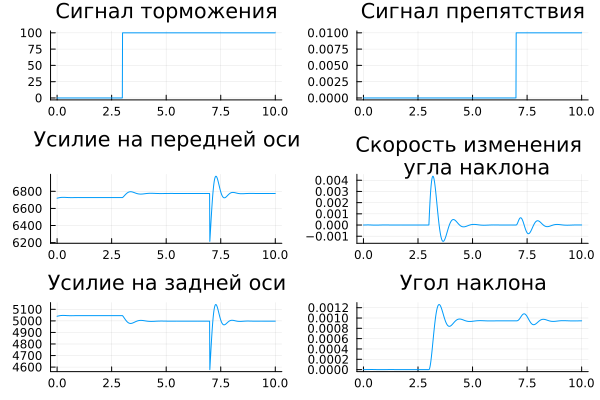
Вывод
В данном примере было продемонстрировано моделирование упрощенной подвески автомобиля. Эта модель позволяет исследовать эффекты, возникающие при работе элементов демпфирования и жесткости подвески.