Сервопривод двухстороннего действия (ИЖ)
Цилиндр гидроусилителя двустороннего действия с золотником с пружинным возвратом в системе изотермической жидкости.
Тип: EngeeFluids.IsothermalLiquid.Valves.Controls.DoubleActingServoActuator
|
Путь в библиотеке: |

Описание
Блок Сервопривод двухстороннего действия (ИЖ) моделирует цилиндр гидроусилителя двустороннего действия, выполненный в виде золотника с пружинным возвратом в среднее положение. Нейтральное положение пружины соответствует середине хода золотника. Движение поршня при его почти полном выдвижении или полном втягивании ограничивается одной из четырех моделей упора. Сжимаемость жидкости дополнительно моделируется в обеих камерах поршня.
Ненаправленный выходной сигнал S сообщает о положении золотника.
Модель упора
Чтобы избежать механического повреждения привода в полностью выдвинутом или втянутом состоянии, привод обычно демонстрирует нелинейное поведение при приближении поршня к этим пределам. Блок Сервопривод двухстороннего действия (ИЖ) моделирует это поведение, используя выбор из четырех моделей упора, которые моделируют податливость материала посредством пружинно-демпферной системы. Модели упора:
-
Stiffness and damping applied smoothly through transition region, damped rebound. -
Full stiffness and damping applied at bounds, undamped rebound. -
Full stiffness and damping applied at bounds, damped rebound. -
Based on coefficient of restitution.
Сила в упоре моделируется, когда поршень находится на верхней или нижней границе. Граничная область находится в пределах Transition region параметра Spool stroke или начального смещения поршня. За пределами этой области .
Подробнее об этих настройках см. на странице блока Поступательные упоры.
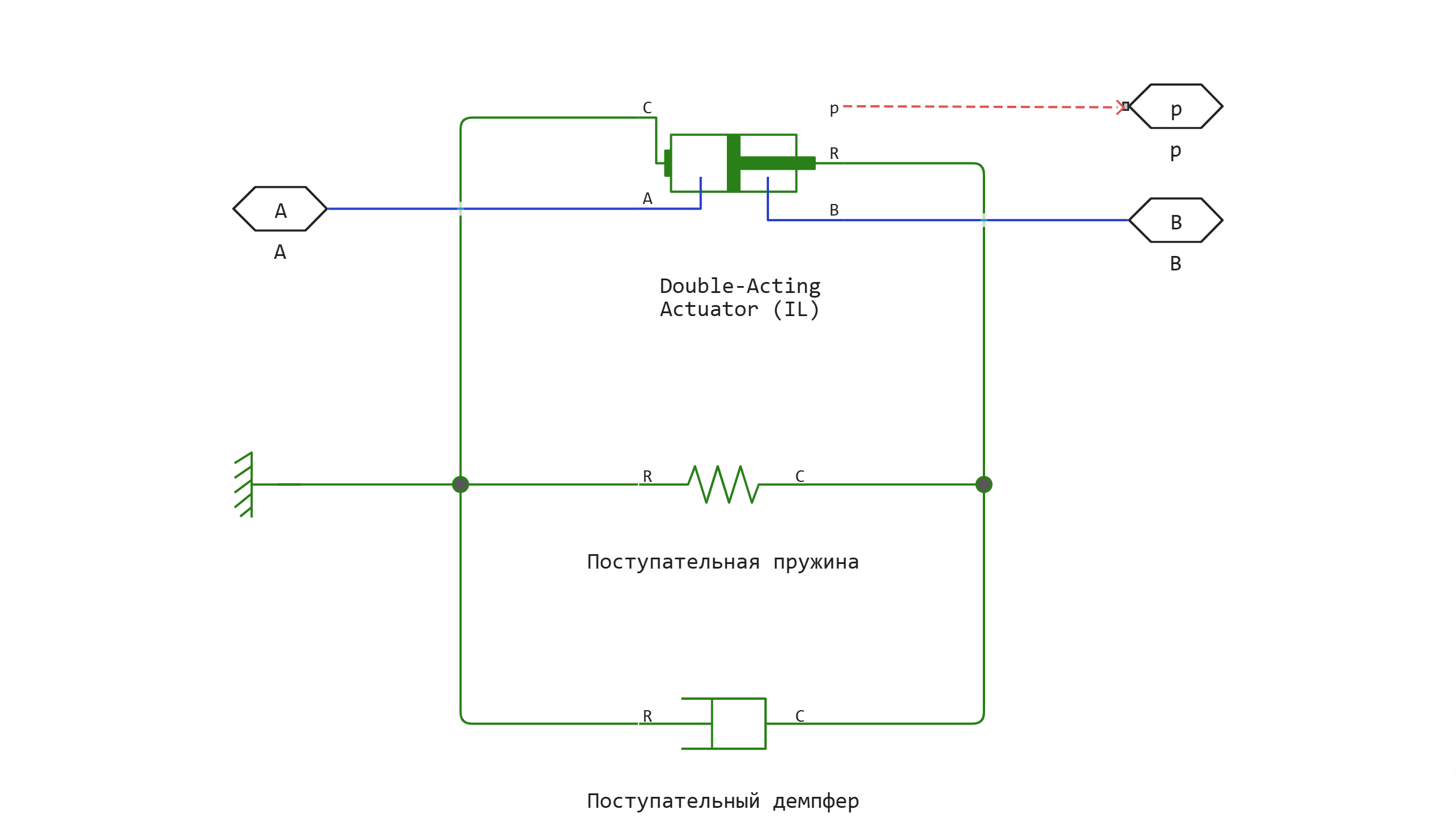
Блок-схема
Блок Сервопривод двухстороннего действия (ИЖ) состоит из одного блока библиотеки Изотермическая жидкость и двух блоков библиотеки Фундаментальные:
Порты
Ненаправленные
#
B
—
ненаправленный порт для камеры B
изотермическая жидкость
Details
Ненаправленный порт, связанный с входом для жидкости камеры B.
| Имя для программного использования |
|
#
A
—
ненаправленный порт для камеры A
изотермическая жидкость
Details
Ненаправленный порт, связанный с входом для жидкости камеры A.
| Имя для программного использования |
|
Выход
#
S
—
положение золотника, м
скаляр
Details
Ненаправленный сигнал, связанный с положением золотника, измеряемый в метрах. Нулевое положение указывает на то, что золотник находится в нейтральном положении в середине хода.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Effects and Initial Conditions
#
Initial liquid pressure in chamber A —
давление жидкости
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Давление в камере A привода в начале моделирования.
Зависимости
Чтобы использовать этот параметр, установите флажок рядом с параметром Fluid dynamic compressibility.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Initial liquid pressure in chamber B —
давление жидкости
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Давление в камере B привода в начале моделирования.
Зависимости
Чтобы использовать этот параметр, установите флажок рядом с параметром Fluid dynamic compressibility.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Spool initial displacement —
начальное положение золотника
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Если начальное смещение золотника равно 0, золотник располагается непосредственно между камерами A и B. Положительное значение расстояния перемещает золотник от камеры A, а отрицательное — к камере A.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Fluid dynamic compressibility — сжимаемость жидкости
Details
Следует ли моделировать какие-либо изменения плотности жидкости из-за сжимаемости жидкости. Если рядом с параметром Fluid dynamic compressibility установлен флажок, изменения, связанные с массовым расходом жидкости в блоке, рассчитываются в дополнение к изменениям плотности, связанным с изменением давления. В библиотеке Изотермическая жидкость все блоки рассчитывают плотность в зависимости от давления.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
Cylinder
#
Spool cross-sectional area —
измерение площади
m^2 | um^2 | mm^2 | cm^2 | km^2 | in^2 | ft^2 | yd^2 | mi^2 | ha | ac
Details
Площадь поперечного сечения золотника.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Damping coefficient —
коэффициент демпфирования
N*s/m | kgf*s/m | lbf*s/ft | lbf*s/in
Details
Коэффициент демпфирования в зоне контакта поршня с корпусом.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Spring stiffness —
жесткость пружины
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
Жесткость центрирующих пружин.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Spool stroke —
расстояние
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Расстояние, которое золотник проходит за один ход.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Hard Stop
#
Static contact speed threshold —
пороговое значение относительной скорости между ползунком и упором перед столкновением
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Пороговое значение относительной скорости между ползунком и упором перед столкновением. Когда ползунок ударяется о корпус со скоростью, меньшей значения параметра Static contact speed threshold, они остаются в контакте. В противном случае ползунок отскакивает. Чтобы избежать моделирования статического контакта ползунка с корпусом, установите для этого параметра значение 0.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model значение Based on coefficient of restitution.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Hard stop model —
выбор модели упора
Stiffness and damping applied smoothly through transition region, damped rebound | Full stiffness and damping applied at bounds, undamped rebound | Full stiffness and damping applied at bounds, damped rebound | Based on coefficient of restitution
Details
Выбор модели силы, действующей на поршень при полном выдвижении или полном втягивании. Подробнее см. на странице блока Поступательные упоры.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Hard stop stiffness coefficient —
коэффициент жесткости
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
Коэффициент жесткости поршня.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model одно из следующих значений:
-
Stiffness and damping applied smoothly through transition region, damped rebound; -
Full stiffness and damping applied at bounds, undamped rebound; -
Full stiffness and damping applied at bounds, damped rebound.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Static contact release force threshold —
пороговое значение силы, необходимой для перехода из контактного режима в свободный режим
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Минимальная сила, необходимая для того, чтобы вывести ползунок из режима статического контакта.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model значение Based on coefficient of restitution.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Transition region —
диапазон применения модели силы в упоре
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Диапазон применения модели силы в упоре. За пределами диапазона максимального выдвижения и максимального втягивания поршня параметр Hard stop model не применяется, и на поршень не воздействует дополнительная сила.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model значение Stiffness and damping applied smoothly through transition region, damped rebound.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Hard stop damping coefficient —
коэффициент демпфирования
N*s/m | kgf*s/m | lbf*s/ft | lbf*s/in
Details
Коэффициент демпфирования поршня.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model одно из следующих значений:
-
Stiffness and damping applied smoothly through transition region, damped rebound; -
Full stiffness and damping applied at bounds, undamped rebound; -
Full stiffness and damping applied at bounds, damped rebound.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Coefficient of restitution — отношение конечной и начальной относительной скорости между ползунком и упором после столкновения
Details
Отношение конечной и начальной относительной скорости между ползунком и упором после отскока ползунка.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model значение Based on coefficient of restitution.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |