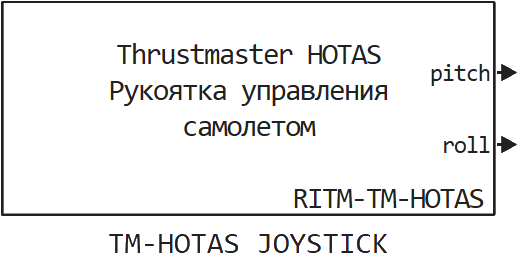
TM-HOTAS JOYSTICK
Получение состояния джойстика.
Тип: CFunction
|
Путь в библиотеке: |
Описание
| Для работы с блоком установите/обновите пакет поддержки блоков РИТМ. |
Блок TM-HOTAS JOYSTICK предназначен для получения состояния джойстика.
Параметры
Параметры
# Шаг расчёта, с: — шаг расчета, с которым будет получаться значение текущего состояния рулевого управления
Details
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Настраиваемый |
Нет |
| Вычисляемый |
Да |