Tire (Magic Formula)
Модель шины, определяемая коэффициентами эмпирической формулы Х.Пацейки.
Тип: Engee1DMechanical.Vehicles.Tires.MagicFormula
|
Путь в библиотеке: |

Описание
Блок Tire (Magic Formula) представляет собой продольное движение шины, задаваемое эмпирической формулой Х.Пацейки [1], которая основана на четырех коэффициентах. Можно моделировать динамику шины при постоянных или переменных условиях дорожного покрытия.
Продольное направление шины совпадает с направлением ее движения по дорожному покрытию.
Этот блок представляет собой компонент, основанный на блоке Tire-Road Interaction (Magic Formula).
Чтобы повысить точность модели шины, можно задать такие свойства, как податливость, инерция, сопротивление качению и изменяющийся эффективный радиус качения. Однако эти свойства увеличивают сложность модели шины и могут замедлить симуляцию. При расчете модели в реальном времени или при подготовке модели к полунатурному моделированию следует пренебречь податливостью и инерцией шины.
Модель шины
В этом блоке шина рассматривается как жесткая комбинация колеса и шины, которая находится в контакте с дорогой и подвержена проскальзыванию. Когда крутящий момент приводит в движение ось колеса, шина передает продольную силу , на дорогу. Шина передает результирующую реакцию в виде силы обратно на колесо. Это действие вращает колесо, создавая продольное движение. Если моделировать податливость шины, то она также будет упруго деформироваться под нагрузкой. Если для параметра Effective rolling radius model установлено значение Load and velocity dependent (Magic Formula), то радиус шины также изменится в зависимости от нагрузки и скорости вращения.
На рисунке показаны силы, действующие на шину.

Переменные, которые определяют модель шины:
-
— радиус качения шины;
-
— продольная скорость ступицы колеса;
-
— продольная деформация шины;
-
— угловая скорость колеса;
-
— угловая скорость точки контакта. Если продольная деформация шины отсутствует, то ;
-
— продольная скорость протектора шины. Обычно продольная скорость протектора шины включает компонент, связанный с вращением шины , и дополнительный компонент, связанный с деформацией шины ;
-
— скорость скольжения пятна контакта. Если продольная упругая деформация шины отсутствует, то ;
-
— коэффициент скольжения колеса для шины без упругой деформации;
-
— пороговая скорость ступицы колеса;
-
— нижняя граница знаменателя коэффициента скольжения;
-
— вертикальная нагрузка на шину;
-
— продольная сила, действующая на шину в точке контакта;
-
— продольная жесткость шины при деформации;
-
— продольное демпфирование шины при деформации;
-
— инерция колеса, такая, что эффективная масса равна ;
-
— крутящий момент, приложенный к оси с колесом.
Кинематика и реакция шины
Вы можете моделировать качение, скольжение и деформацию.
Качение и скольжение
Уравнение поступательного движения не скользящей, не деформируемой шины выглядит так: . Скольжение шин приводит к изменению продольной силы .
Скорость скольжения пятна контакта равна . Для шины без деформации .
Несглаженное значение коэффициента скольжения пятна контакта равно:
Блок определяет знаменатель коэффициента скольжения как:
где — значение параметра Lower boundary of slip denominator, VXLOW.
Значение плавно меняется до в переходных областях:
,
.
Блок определяет коэффициент скольжения в соответствии с:
где
-
— значение параметра Minimum valid wheel slip, KPUMIN;
-
— значение параметра Maximum valid wheel slip, KPUMAX.
Значение плавно меняется в переходных областях:
,
.
Блок определяет порог сглаживания коэффициента скольжения как:
Для этого уравнения заблокированное, скользящее колесо имеет . Для идеального качения .
Деформация
Если установлен флажок Compliance, то блок рассматривает шину как упругую. Когда шина деформируется, точка контакта шины с дорогой поворачивается с угловой скоростью , немного отличающейся от скорости колеса , что приводит к проскальзыванию пятна контакта. Блок определяет деформирующуюся шину как поступательный пружинный демпфер с жесткостью и демпфированием .
Если не установлен флажок Compliance, то , и в любой момент времени в симуляции отсутствует продольная деформация шины, то .
Динамика шин и колес
Этот блок состоит из нескольких подкомпонентов. Эквивалентная схема блока приведена ниже.
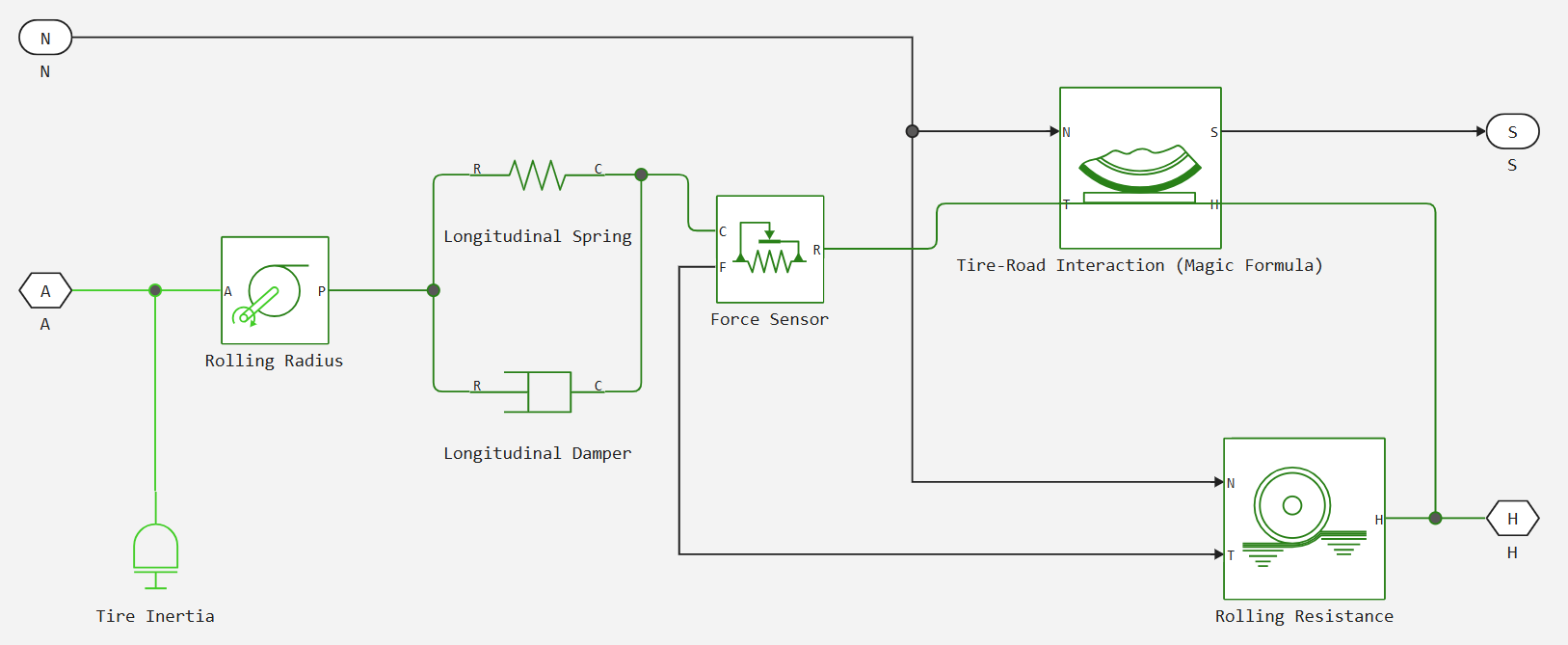
Блок моделирует переходный и стационарный режим, а также старт и остановку. Блоки Translational Spring и Translational Damper эквивалентны жесткости и демпфированию шины соответственно.
Блок Tire-Road Interaction (Magic Formula) представляет продольную силу на шине как функцию и с помощью эмпирической формулы Х.Пацейки, где — независимая переменная скольжения, а — входной сигнал на порту N.
Блок Wheel and Axle — это радиус качения шины . Значение инерции — это эффективная инерция . Характеристическая функция шины определяет продольную силу . Вместе с крутящим моментом приводного вала, приложенным к оси колеса, определяет угловое и продольное движение колеса.
Если деформация шины не моделируется, то блок не учитывает подкомпоненты Translational Spring и Translational Damper в эквивалентной схеме, а контактные переменные возвращаются к переменным колеса. В этом случае шина фактически имеет бесконечную жесткость, и порт P блока Wheel and Axle соединяется напрямую с портом C блока Force Sensor.
Если в блоке Rolling Resistance указана отличная от Pressure and velocity dependent (Magic Formula) модель сопротивления качению, то в эквивалентной схеме не будет использоваться блок Force Sensor и порт T блока Rolling Resistance. Если не установлен флажок Compliance, то порт P блока Wheel and Axle подключается непосредственно к порту C блока Force Sensor или порту T блока Tire-Road Interaction (Magic Formula).
Эффективный радиус качения
Этот блок определяет эффективный радиус качения, учитывая его увеличение или уменьшение за счет центробежных сил, таким образом, что
где
-
— эффективный радиус качения;
-
— увеличение свободного радиуса шины под действием центробежных сил;
-
— вертикальная нагрузка на шину;
-
— значение параметра Tire nominal vertical load, FNOMIN;
-
— значение параметра Vertical stiffness;
-
— скорость вращения колеса;
-
— значение параметра Low load stiffness effective rolling radius, BREFF;
-
— значение параметра Peak value of effective rolling radius, DREFF;
-
— значение параметра High load stiffness effective rolling radius, FREFF;
-
— значение параметра Ratio of nominal tire radius with non-rolling free tire radius, Q_RE0;
-
— значение параметра Tire radius increase with speed, Q_V1.
Допущения и ограничения
-
Блок предполагает только продольное движение и не учитывает развал, поворот или боковое движение.
-
Податливость шины подразумевает временную задержку в реакции шины на действующие на нее силы. Симуляция с временной задержкой повышает точность модели, но увеличивает время симуляции.
Порты
Выход
#
S
—
скольжение
скаляр
Details
выходной порт, связанный с коэффициентом скольжения, , между шиной и дорогой.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Ненаправленные
#
H
—
ступица
поступательная механика
Details
Механический поступательный порт, связанный со ступицей колеса.
| Имя для программного использования |
|
#
A
—
ось
вращательная механика
Details
Механический вращательный порт, связанный с осью.
| Имя для программного использования |
|
Вход
#
M
—
вектор коэффициентов эмпирической формулы
вектор
Details
Входной порт, задающий коэффициенты эмпирической формулы Х.Пацейки.
Предоставьте коэффициенты в виде вектора .
Зависимости
Чтобы использовать этот порт, установите для параметра Parameterize by значение Physical signal Magic Formula coefficients.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
N
—
нормальная сила, Н
скаляр
Details
Входной порт, связанный с нормальной силой, действующей на шину, в Н. Нормальная сила положительна, если она действует на шину в направлении вниз, прижимая ее к дорожному покрытию.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Сопротивление качению
# Alpha — экспонента в уравнении для давления в шинах
Details
Экспонента в уравнении для давления в шинах.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Coefficient B —
компонент силы, зависящий от скорости, B
s/m | s/ft
Details
Компонент силы, зависящий от скорости, в уравнении модели. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Q-coefficient parameters [qsy1, qsy2, qsy3, qsy4, qsy5, qsy6, qsy7, qsy8] — Q-коэффициенты для эмпирической формулы
Details
Коэффициенты эмпирической формулы .
qsy1,…, qsy8 — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Resistance model значение Pressure and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Tire nominal pressure, NOMPRES —
номинальное давление в шинах
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Номинальное давление в шинах.
NOMPRES — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Resistance model значение Pressure and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Velocity threshold for rolling resistance —
пороговая скорость для сопротивления качению
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Скорость, при которой полная сила сопротивления качению передается на ступицу колеса. Этот параметр гарантирует, что сила остается непрерывной при изменении направления скорости, что повышает численную стабильность моделирования. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Coefficient A — компонент силы, не зависящий от скорости, A
Details
Компонент силы, не зависящий от скорости, в уравнении модели. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Model rolling resistance — учитывать сопротивление качению
Details
Установите этот флажок, чтобы учитывать сопротивление качению шины при симуляции.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Resistance model —
модель сопротивления качению
Constant coefficient | Pressure and velocity dependent (SAE J2452) | Pressure and velocity dependent (Magic Formula)
Details
Модель для расчета сопротивления качению:
-
Constant coefficient— сопротивление качению учитывается с помощью постоянного коэффициента. -
Pressure and velocity dependent (SAE J2452)— сопротивление качению определяется в соответствии с SAE J2452. -
Pressure and velocity dependent (Magic Formula)— сопротивление качению определяется в соответствии с эмпирической формулой.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Hub nominal longitudinal velocity for rolling resistance, LONGVL —
номинальная продольная скорость ступицы
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Номинальная продольная скорость ступицы.
LONGVL — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Resistance model значение Pressure and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Tire nominal vertical load for rolling resistance, FNOMIN —
нормальная сила
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Номинальная нормальная сила на шине.
FNOMIN — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Resistance model значение Pressure and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Beta — экспонента в уравнении для нормальной силы
Details
Экспонента в уравнении для нормальной силы.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Constant coefficient — константа пропорциональности
Details
Коэффициент, устанавливающий пропорциональность между нормальной силой и силой сопротивления качению. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Constant coefficient.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Coefficient C —
компонент силы, зависящий от скорости, C
s^2/m^2 | s^2/ft^2
Details
Компонент силы, который зависит от квадрата скорости в уравнении модели. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Tire pressure —
давление в шинах
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Давление накачки шины. Параметр должен быть больше нуля.
Зависимости
Чтобы использовать этот параметр, установите флажок Model rolling resistance, а для параметра Resistance model установите значение Pressure and velocity dependent (SAE J2452) или Pressure and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Геометрические характеристики
#
Rolling radius —
радиус шины под нагрузкой
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Радиус шины под нагрузкой .
Зависимости
Чтобы использовать этот параметр, установите:
-
для параметра Parameterize by значение
Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значениеConstant radius; -
для параметра Parameterize by значение
Peak longitudinal force and corresponding slip,Constant Magic Formula coefficientsилиPhysical signal Magic Formula coefficients.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Peak value of effective rolling radius, DREFF — переменная Dreff
Details
Пиковое значение эффективного радиуса качения.
DREFF — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Effective rolling radius model —
модель расчета эффективного радиуса качения
Constant radius | Load and velocity dependent (Magic Formula)
Details
Выберете модель для определения радиуса качения:
-
Constant radius— радиус качения постоянный; -
Load and velocity dependent (Magic Formula)— радиуса качения зависит от нагрузки и скорости.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Nominal hub longitudinal speed, LONGVL —
номинальная продольная скорость ступицы
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Номинальная продольная скорость ступицы.
LONGVL — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Low load stiffness effective rolling radius, BREFF — переменная Breff
Details
Эффективный радиус качения для низкой жесткости нагрузки.
BREFF — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Ratio of nominal tire radius with non-rolling free tire radius, Q_RE0 — переменная qre0
Details
Отношение номинального радиуса шины к радиусу шины без качения.
Q_RE0 — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Tire radius increase with speed, Q_V1 — переменная qV1
Details
Увеличение радиуса шины в зависимости от скорости.
Q_V1 — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Vertical stiffness —
вертикальная жесткость
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
Вертикальная жесткость шины.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# High load stiffness effective rolling radius, FREFF — переменная Freff
Details
Эффективный радиус качения при высокой жесткости нагрузки.
FREFF — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Non-rolling free tire radius, R0 —
свободный радиус качения шины
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Значение свободного радиуса качения шины, связанное с эмпирической формулой.
R0 — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients, а для параметра Effective rolling radius model значение Load and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Динамические характеристики
# Inertia — модель инерции
Details
Установите этот флажок, чтобы учитывать инерцию шины.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Tire inertia —
значение инерции шин
kg*m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
Момент инерции колеса.
Зависимости
Чтобы использовать этот параметр, установите флажок Inertia.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Longitudinal stiffness —
продольная жесткость
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
Продольная жесткость шины .
Зависимости
Чтобы использовать этот параметр, установите флажок Compliance.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Compliance — учет податливости шины
Details
Нужно ли включать учет податливости шины:
-
если флажок Compliance не установлен, то блок пренебрегает динамической деформацией.
-
если флажок Compliance установлен, то блок рассматривает шину как пружинно-демпферную систему под нагрузкой.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Longitudinal damping —
продольное демпфирование
N*s/m | kgf*s/m | lbf*s/ft | lbf*s/in
Details
Продольное демпфирование шины .
Зависимости
Чтобы использовать этот параметр, установите флажок Compliance.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Initial velocity —
начальная скорость вращения
rad/s | deg/s | rad/min | deg/min | rpm | rps
Details
Начальная угловая скорость шины .
Зависимости
Чтобы использовать этот параметр, установите флажок Inertia.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Параметры масштабирования
# Scale factor of Fx horizontal shift, LHX — горизонтальный сдвиг Fx
Details
Коэффициент масштабирования горизонтального сдвига .
LHX — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx nominal vertical load, LFZO — номинальная вертикальная нагрузка Fx
Details
Коэффициент масштабирования номинальной вертикальной нагрузки .
LFZO — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx shape factor, LCX — фактор формы Fx
Details
Коэффициент масштабирования фактора формы .
LCX — это идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx vertical shift, LVX — вертикальный сдвиг Fx
Details
Коэффициент масштабирования вертикального сдвига .
LVX — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of rolling resistance, LMY — сопротивление качению
Details
Коэффициент масштабирования сопротивления качению.
LMY — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите:
-
для параметра Parameterize by значение
Load-dependent Magic Formula coefficients; -
для параметра Resistance model значение
Pressure and velocity dependent (Magic Formula).
И установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx peak friction coefficient, LMUX — пиковый коэффициент трения Fx
Details
Коэффициент масштабирования пикового коэффициента трения .
LMUX — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx curvature factor, LEX — коэффициент кривизны Fx
Details
Коэффициент масштабирования коэффициента кривизны .
LEX — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Scale factor of Fx slip stiffness, LKX — жесткость скольжения Fx
Details
Коэффициент масштабирования жесткости скольжения .
LKX — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients и установите флажок Enable scaling coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Enable scaling coefficients — масштабирование сопротивления качению
Details
Установите этот флажок, чтобы включить коэффициенты масштабирования в параметризацию эмпирической формулы.
Зависимости
Чтобы использовать этот параметр, установите:
-
для параметра Parameterize by значение
Load-dependent Magic Formula coefficients; -
для параметра Resistance model значение
Pressure and velocity dependent (Magic Formula).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
Основные
# Magic Formula E-coefficient parameters, [p_Ex1, p_Ex2, p_Ex3, p_Ex4] — коэффициенты E в эмпирической формуле
Details
Коэффициенты в эмпирической формуле, зависящие от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Slip at peak force at rated load (percent) — коэффициент скольжения в процентах при максимальном продольном усилии и номинальной нагрузке
Details
Коэффициент скольжения , выраженный в процентах (%), когда продольная сила равна максимальному значению , а вертикальная нагрузка равна номинальному значению .
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Peak longitudinal force and corresponding slip.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula V-coefficient parameters, [p_Vx1, p_Vx2] — коэффициенты V в эмпирической формуле
Details
Коэффициенты в эмпирической формуле, зависящие от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula D-coefficient parameters, [p_Dx1, p_Dx2] — коэффициенты D в эмпирической формуле
Details
Коэффициенты в эмпирической формуле, зависящие от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula D coefficient — постоянный коэффициент D в эмпирической формуле
Details
Коэффициент в эмпирической формуле, не зависящий от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Constant Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula BCD-coefficient parameters, [p_Kx1, p_Kx2, p_Kx3] — коэффициенты K в эмпирической формуле
Details
Коэффициенты в эмпирической формуле, зависящие от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula E coefficient — постоянный коэффициент E в эмпирической формуле
Details
Коэффициент в эмпирической формуле, не зависящий от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula C coefficient — постоянный коэффициент C в эмпирической формуле
Details
Коэффициент в эмпирической формуле, не зависящий от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Constant Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Peak longitudinal force at rated load —
максимальное продольное усилие при номинальной нагрузке
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Максимальная продольная сила , которую шина оказывает на колесо, когда вертикальная нагрузка равна ее номинальному значению .
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Peak longitudinal force and corresponding slip.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula C-coefficient parameter, p_Cx1 — коэффициент C в эмпирической формуле
Details
Коэффициент в эмпирической формуле, зависящий от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Tire nominal vertical load, FNOMIN —
номинальная нормальная сила
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Номинальная нормальная сила на шине.
FNOMIN — идентификатор файла TIR.
Зависимости
Чтобы использовать этот параметр, установите для параметра Resistance model значение Pressure and velocity dependent (Magic Formula).
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Rated vertical load —
номинальная сила нагрузки
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Номинальная сила вертикальной нагрузки .
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Peak longitudinal force and corresponding slip.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Magic Formula H-coefficient parameters, [p_Hx1, p_Hx2] — коэффициенты H в эмпирической формуле
Details
Коэффициенты в эмпирической формуле, зависящие от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Load-dependent Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Parameterize by —
метод параметризации
Peak longitudinal force and corresponding slip | Constant Magic Formula coefficients | Load-dependent Magic Formula coefficients | Physical signal Magic Formula coefficients
Details
Выберите, как блок параметризует шину с помощью эмпирической формулы:
-
Peak longitudinal force and corresponding slip— параметризация эмпирической формулы с помощью физических характеристик шины. -
Constant Magic Formula coefficients— задайте параметры, определяющие постоянные коэффициенты , , и в виде скаляров. -
Load-dependent Magic Formula coefficients— задайте параметры в виде векторов, определяющие коэффициенты , , , , , и , зависящие от нагрузки, по одному параметру на каждый коэффициент. -
Physical signal Magic Formula coefficients— задайте коэффициенты эмпирической формулы через порт M в виде четырехэлементного вектора .
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
# Magic Formula B coefficient — постоянный коэффициент B в эмпирической формуле
Details
Коэффициент в эмпирической формуле, не зависящий от нагрузки.
Зависимости
Чтобы использовать этот параметр, установите для параметра Parameterize by значение Constant Magic Formula coefficients.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Параметры проскальзывания
# Maximum valid wheel slip, KPUMAX — максимальное значение коэффициента скольжения колеса
Details
Максимальное допустимое значение коэффициента скольжения колеса.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Velocity threshold —
порог режима проскальзывания шины
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Пороговая скорость , которую блок использует для перехода между режимами скольжения.
Подробнее см. Качение и скольжение.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Lower boundary of slip denominator, VXLOW —
нижняя граница знаменателя коэффициента скольжения
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Нижняя граница знаменателя коэффициента скольжения .
VXLOW — идентификатор файла TIR.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Minimum valid wheel slip, KPUMIN — минимальное значение коэффициента скольжения колеса
Details
Минимальное допустимое значение коэффициента скольжения колеса. Отрицательное значение означает скольжение колеса в обратном направлении относительно вращения.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Литература
-
I.J.M. Besselink, A.J.C. Schmeitz, H. B. Pacejka, An Improved Magic Formula/Swift Tyre Model That Can Handle Inflation Pressure Changes, Vehicle System Dynamics 48, no. sup1 (December 2010): 337–52. https://doi.org/10.1080/00423111003748088.
-
H.B. Pacejka., Tire and Vehicle Dynamics, Elsevier Science, 2005.