ss2sos
Преобразование параметров цифрового фильтра в пространстве состояний в секции второго порядка.
| Библиотека |
|
Аргументы
Входные аргументы
#
A —
матрица состояния
матрица
Details
Матрица состояния, заданная как матрица. Если система имеет входов и выходов и описывается переменными состояния, то матрица A имеет размер на .
#
B —
матрица входа
матрица
Details
Матрица входа, заданная как матрица. Если система имеет входов и выходов и описывается переменными состояния, то матрица B имеет размер на .
#
C —
матрица выхода
матрица
Details
Матрица выхода, заданная как матрица. Если система имеет входов и выходов и описывается переменными состояния, то матрица C имеет размер на .
#
D —
матрица сквозной передачи
матрица
Details
Матрица сквозной передачи, заданная как матрица. Если система имеет входов и выходов и описывается переменными состояния, то матрица D имеет размер на .
#
iu —
индекс
1 (по умолчанию) | целое число
Details
Индекс, заданный как целое число.
#
scale —
масштабирование коэффициентов усиления и числителя
"none" (по умолчанию) | "inf" | "two"
Details
Масштабирование коэффициентов усиления и числителя, заданное одним из следующих значений:
-
"none"— масштабирование не применяется; -
"inf"— масштабирование по бесконечной норме; -
"two"— масштабирование по второй норме.
Использование масштабирования по бесконечной норме с порядком "up" минимизирует вероятность переполнения в реализации. Использование масштабирования по второй норме с порядком "down" минимизирует пиковый шум округления.
| Масштабирование по бесконечной норме и по второй норме подходит только для реализаций в прямой форме II. |
Выходные аргументы
#
sos —
представление секции второго порядка
матрица
Details
Представление секции второго порядка, возвращаемое в виде матрицы. Аргумент sos — это матрица размером
строки которой содержат коэффициенты числителя и знаменателя и секций второго порядка функции :
#
g —
общий коэффициент усиления системы
скаляр
Details
Общий коэффициент усиления системы, возвращаемый в виде вещественного скаляра.
Если вызвать функцию ss2sos с одним выходным аргументом, то функция встроит общий коэффициент усиления системы в первую секцию , так что
Встраивание коэффициента усиления в первую секцию при масштабировании структуры прямой формы II не рекомендуется и может привести к нестабильному масштабированию. Чтобы избежать встраивания коэффициента усиления, используйте ss2sos с двумя выходными аргументами: sos и g.
|
Примеры
Представление фильтра в виде секций второго порядка
Details
Разработаем фильтр нижних частот Баттерворта 5-го порядка, задав частоту среза равной рад/отсчет и представив выходной сигнал в форме пространства состояний. Преобразуем результат в пространстве состояний в секции второго порядка. Визуализируем частотную характеристику фильтра.
import EngeeDSP.Functions: butter, ss2sos
A, B, C, D = butter(5, 0.2, out = 4)
sos, g = ss2sos(A, B, C, D)
println("sos = ", sos)sos = [1.0 1.0004631991200947 0.0 1.0 -0.5095254494944288 0.0; 1.0 1.9995370439927413 0.9995370439927413 1.0 -1.0965794655679613 0.35544676217239035; 1.0 1.999999756887197 0.9999999713279842 1.0 -1.3693171946832927 0.6925691353878634]import EngeeDSP.Functions: freqz
freqz(sos, out = :plot)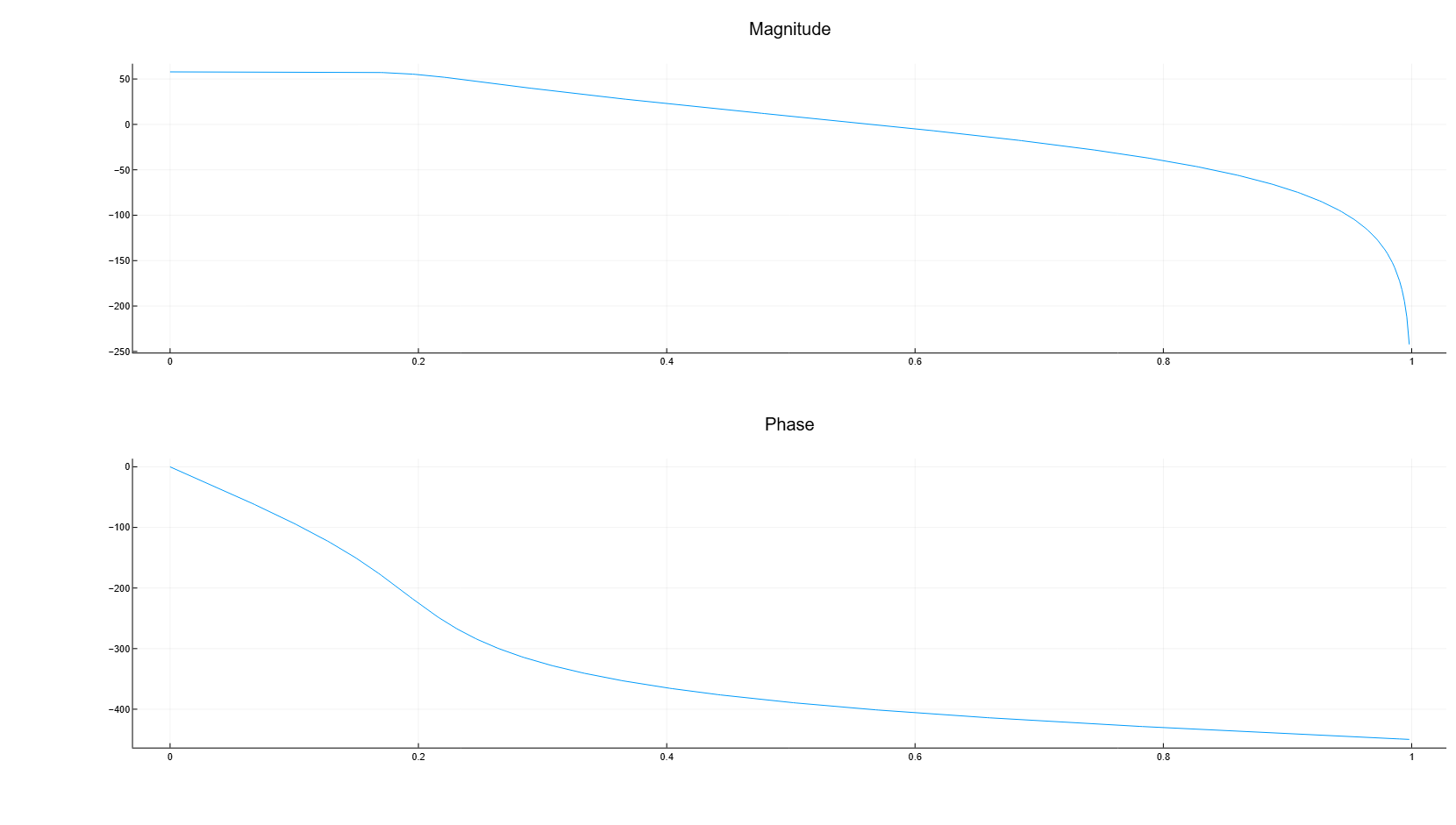
Система «масса-пружина»
Details
Одномерная дискретная колебательная система состоит из единичной массы , прикрепленной к стене пружиной с единичной упругой постоянной . Датчик регистрирует ускорение массы с частотой Гц.

Сгенерируем 50 периодов дискретизации. Определим интервал дискретизации .
Fs = 5
dt = 1 / Fs
N = 50
t = dt * (0:N-1)Осциллятор можно описать уравнениями пространства состояний:
где — вектор состояния, и — соответственно положение и скорость массы, а матрицы
A = [cos(dt) sin(dt); -sin(dt) cos(dt)]
B = [1 - cos(dt); sin(dt)]
C = [-1 0]
D = 1Система возбуждается единичным импульсом в положительном направлении. Используем модель пространства состояний для вычисления временной эволюции системы, начиная с нулевого начального состояния.
u = [1; zeros(N-1)]
x = [0.0; 0.0]
y = zeros(N)
for k = 1:N
y[k] = (C * x)[1] + D * u[k]
global x = A * x + B * u[k]
endПостроим график зависимости ускорения массы от времени.
plot(t, y,
seriestype = :stem,
marker = :circle,
legend = false)
Вычислим зависимость ускорения от времени, используя передаточную функцию для фильтрации входного сигнала. Выразим передаточную функцию в виде секций второго порядка. Построим график результата. Результат одинаков в обоих случаях.
import EngeeDSP.Functions: ss2sos, sosfilt
sos = ss2sos(A, B, C, D)
yt = sosfilt(sos[1], u)
plot(t, yt,
seriestype = :stem,
marker = :circle,
legend = false)
Алгоритмы
Функция ss2sos использует четырехэтапный алгоритм для определения представления секции второго порядка для входной системы пространства состояний:
-
Она находит полюса и нули системы, заданные параметрами
A,B,CиD. -
Использует функцию
zp2sos, которая сначала группирует нули и полюса в комплексно-сопряженные пары с помощью функцииcplxpair. Затемzp2sosформирует секции второго порядка путем объединения пар полюсов и нулей в соответствии со следующими правилами:-
Объединить полюса, ближайшие к единичной окружности, с нулями, ближайшими к этим полюсам.
-
Объединить полюса, следующие по близости к единичной окружности, с нулями, ближайшими к этим полюсам.
-
Продолжать, пока не будут объединены все полюса и нули.
Функция
ss2sosгруппирует вещественные полюса в секции, где вещественные полюса находятся ближе всего к ним по абсолютному значению. То же правило действует и для вещественных нулей. -
-
Упорядочивает секции в соответствии с близостью пар полюсов к единичной окружности. Обычно
ss2sosупорядочивает секции с полюсами, наиболее близкими к единичной окружности, последними в каскаде. Можно указать функцииss2sos, чтобы она упорядочила секции в обратном порядке, используя аргументorder. -
Функция
ss2sosмасштабирует секции по норме, указанной в аргументеscale. Для произвольной функции масштабирование определяется следующим образом:где может быть либо бесконечностью, либо
2. Подробную информацию о масштабировании см. в источниках в разделе Литература. Алгоритм следует этому масштабированию, чтобы минимизировать переполнение или пиковый шум округления в реализациях фильтров с фиксированной точкой.
Литература
-
Jackson, L. B. Digital Filters and Signal Processing. 3rd ed. Boston: Kluwer Academic Publishers, 1996.
-
Mitra, S. K. Digital Signal Processing: A Computer-Based Approach. 3rd ed. New York: McGraw-Hill Higher Education, 2006.
-
Vaidyanathan, P. P. «Robust Digital Filter Structures.» Handbook for Digital Signal Processing (S. K. Mitra and J. F. Kaiser, eds.). New York: John Wiley & Sons, 1993.