Гидравлическая турбина и регулятор
Модель гидравлической турбины и пропорционально-интегрально-производной (PID) системы управления.
Тип: SubSystem
|
Путь в библиотеке: |

Описание
Блок Гидравлическая турбина и регулятор реализует нелинейную модель гидравлической турбины, систему ПИД-регулятора и сервопривод [1]:
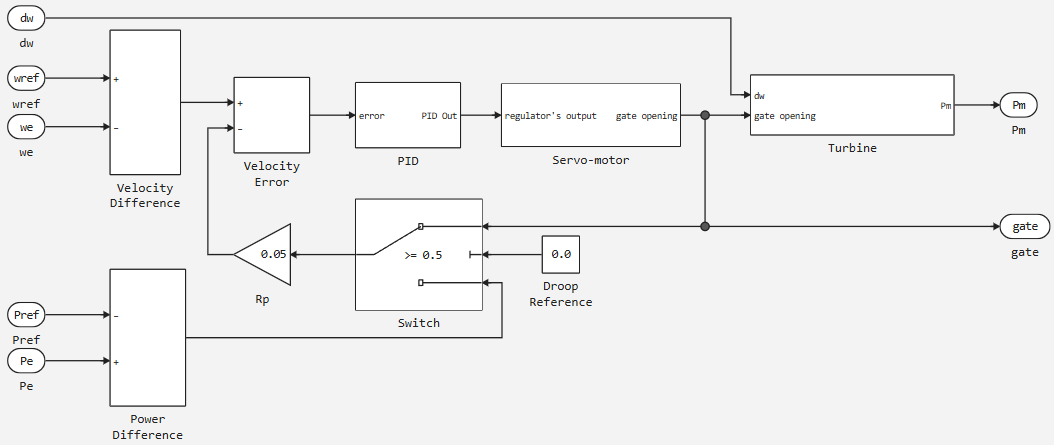
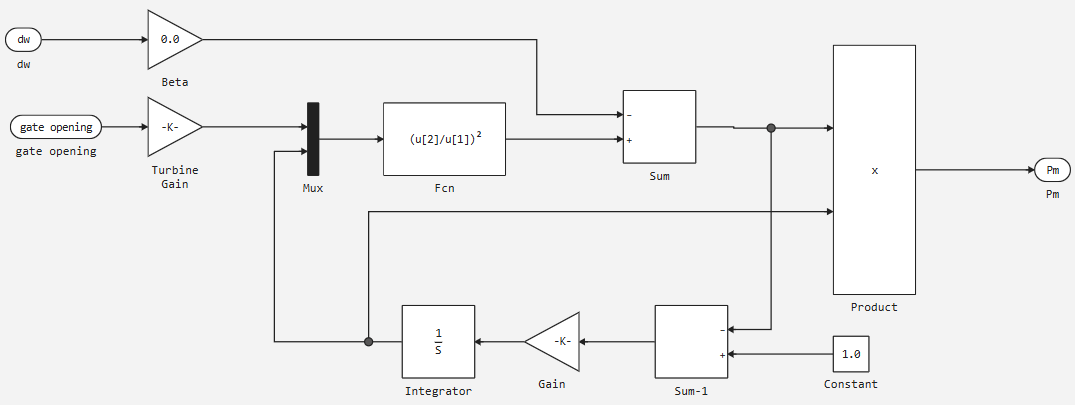
Гидравлическая турбина моделируется следующей нелинейной системой:
Сервопривод затвора моделируется системой второго порядка:

Порты
Вход
#
ωe
—
фактическая скорость машины
скаляр
Details
Фактическая скорость машины в относительных единицах.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Δω
—
отклонение скорости
скаляр
Details
Отклонение скорости в относительных единицах.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
ωref
—
эталонная скорость
скаляр
Details
Эталонная скорость в относительных единицах.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
gate
—
открытие затвора
скаляр
Details
Открытие затвора в относительных единицах.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Pref
—
эталонная механическая мощность
скаляр
Details
Эталонная механическая мощность в относительных единицах. Этот вход можно не подключать, если хотите использовать положение затвора в качестве входа в цепь обратной связи вместо отклонения мощности.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Выход
#
Pm
—
механическая мощность
скаляр
Details
Механическая мощность для блока Synchronous Machine в относительных единицах.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Pe0
—
фактическая электрическая мощность машины
скаляр
Details
Фактическая электрическая мощность машины в относительных единицах. Этот вход можно не подключать, если хотите использовать положение затвора в качестве входа в цепь обратной связи вместо отклонения мощности.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Основные
# Коэффициент усиления и постоянная времени системы первого порядка Servo-motor [Ka Ta(s)] — коэффициент усиления и постоянная времени системы первого порядка
Details
Коэффициент усиления и постоянная времени , в секундах (с), системы первого порядка, представляющей сервопривод.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Пределы открытия затвора [gmin(о.е.) gmax(о.е.) vgmin(о.е./с) vgmax(о.е./с)] — пределы открытия затвора
Details
Ограничения и (pu), накладываемые на открытие затвора, и и ( ), накладываемые на скорость затвора.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Статизм и регулятор [Rp Kp Ki Kd Td(с)] — постоянный дроссель и регулятор
Details
Статический коэффициент усиления регулятора равен обратной величине постоянного спада в цепи обратной связи. ПИД-регулятор имеет пропорциональный коэффициент усиления , интегральный коэффициент усиления и коэффициент усиления производной . Высокочастотный коэффициент усиления ПИД-регулятора ограничивается фильтром нижних частот первого порядка с постоянной времени (с).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент демпфирования отклонения скорости и время запуска воды [beta Tw(с)] — коэффициент демпфирования отклонения скорости и время запуска воды
Details
Коэффициент демпфирования отклонения скорости и время пуска воды (с).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Вход контура обратной связи — вход контура обратной связи
Details
Вход контура обратной связи: положение затвора (1) или отклонение электрической мощности (0).
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Начальные значения
# Начальная механическая мощность, о.е. — начальная механическая мощность
Details
Начальная механическая мощность в относительных единицах.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |