Гидротурбина с регулятором скорости IEEEG3
Линеаризованная модель гидротурбины с регулятором скорости IEEE тип 3.
Тип: SubSystem
|
Путь в библиотеке: |

Описание
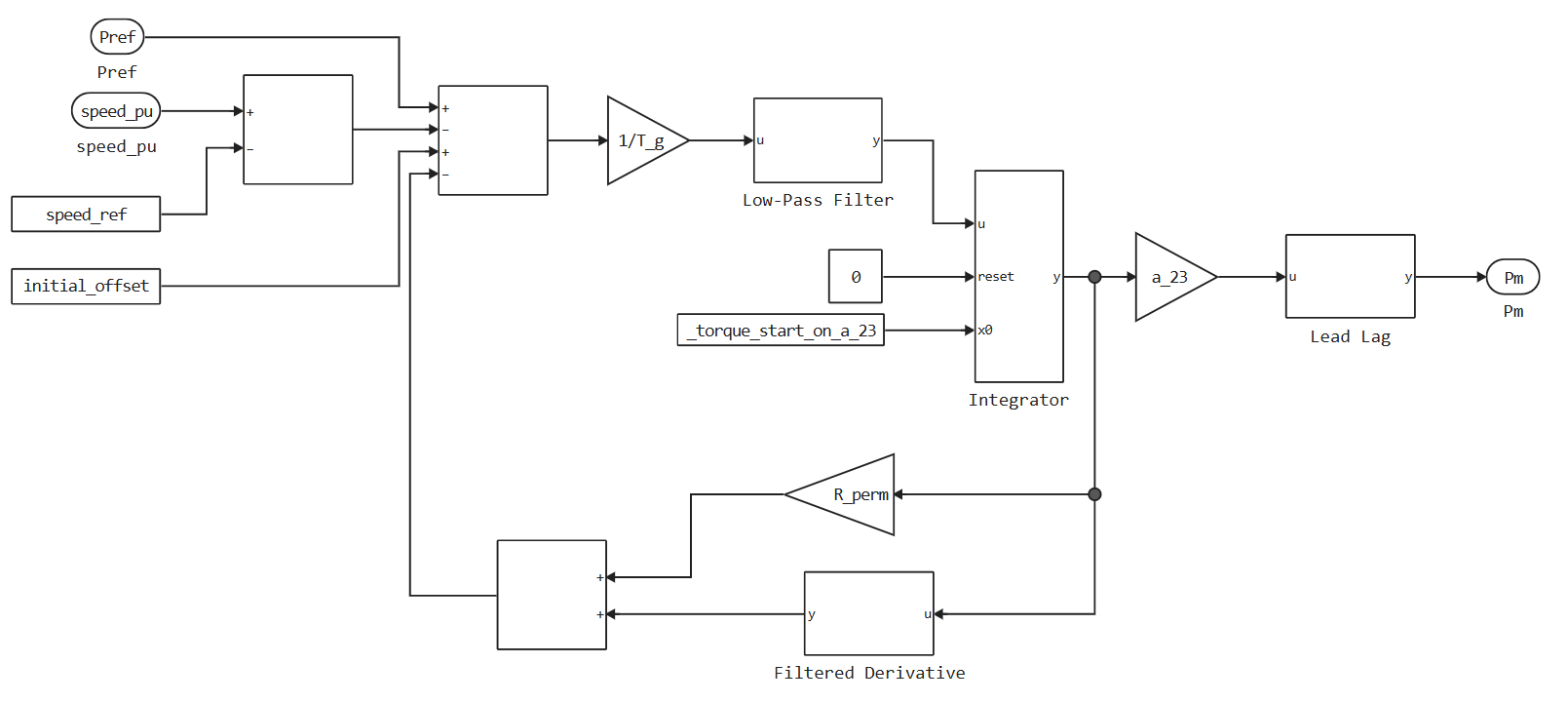
Блок Гидротурбина с регулятором скорости IEEEG3 представляет собой модель гидротурбины-регулятора IEEEG3 с динамикой напорного водовода.
Этот блок имеет более подробную модель регулятора, чем блок Governor Type 1, и использует линеаризованную модель турбины, или модель водяного столба, и динамику напорного водовода.
Эта схема иллюстрирует общую структуру блока:
Порты
Вход
#
ω
—
скорость вращения турбины
скаляр
Details
Скорость турбины в относительных единицах, заданная в виде скаляра.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
Pref
—
смещение опорной скорости
скаляр
Details
Смещение, применяемое к заданию скорости нагрузки турбины-регулятора, возвращается в виде скаляра.
Подключите этот порт к выходному порту Pref блока регулятора нагрузки турбины, например, блока Регулятор LCFB1.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Выход
#
Pm
—
механическая мощность
скаляр
Details
Механическая мощность, возвращается в виде скаляра.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Основные
# Номинальная частота, о.е. — уставка по скорости
Details
Эталон скорости в относительных единицах.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Начальный крутящий момент, о.е. — начальный крутящий момент
Details
Начальный крутящий момент в относительных единицах в начале моделирования.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Период дискретизации — период дискретизации
Details
Время между последовательными выполнениями блока. Во время выполнения блок производит выходные данные и, если необходимо, обновляет свое внутреннее состояние.
-
Для унаследованной дискретно-временной работы установите для этого параметра значение
-1. -
Для работы в режиме дискретного времени установите для этого параметра целое положительное число.
-
Для работы в режиме непрерывного времени установите для этого параметра значение
0.
Если этот блок находится в маскированной подсистеме или вариантной подсистеме, поддерживающей переключение между непрерывным и дискретным режимом работы, увеличьте значение этого параметра, чтобы обеспечить корректное переключение между непрерывной и дискретной реализациями блока.
Для получения дополнительной информации см. Маски в Engee
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Основные
# Постоянная времени для сервомотора направляющего аппарата гидротурбины T_g, с — постоянная времени для сервомотора направляющего аппарата гидротурбины
Details
Постоянная времени для сервомотора направляющего аппарата гидротурбины.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Постоянная времени управляющего сигнала T_p, с — постоянная времени управляющего сигнала
Details
Постоянная времени управляющего сигнала. Этот параметр связан с блоком, обозначенным на схеме как Low-Pass Filter.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Предел скорости открытия затвора U_o, о.е./с — предел скорости открытия затвора
Details
Предел скорости открытия затвора на единицу. Этот параметр связан с блоком, обозначенным на схеме как Low-Pass Filter.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Предел скорости закрытия затвора U_c, о.е./с — предел скорости закрытия затвора
Details
Предел скорости закрытия затвора на единицу. Этот параметр связан с блоком, обозначенным на схеме как Low-Pass Filter.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Максимальное открытие клапана о.е., при мощности P-max — максимальное открытие клапана о. е., при мощности P-max
Details
Максимальное открытие клапана о. е., при мощности P-max.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Минимальное открытие клапана о.е., при мощности P-min — минимальное открытие клапана о. е., при мощности P-min
Details
Минимальное открытие клапана о. е., при мощности P-min.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент статизма по скорости R_perm, о.е. — коэффициент статизма по скорости в относительных единицах
Details
Коэффициент статизма по скорости в относительных единицах.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент снижения скорости в переходный период R_temp, о.е. — коэффициент снижения скорости в переходный период
Details
Коэффициент снижения переходной скорости в относительных единицах. Этот параметр связан с блоком, обозначенным на схеме как Filtered Derivative.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Постоянная времени регулятора T_r, с — постоянная времени регулятора
Details
Постоянная времени регулятора. Этот параметр связан с блоком, обозначенным на схеме как Filtered Derivative.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Постоянная времени запуска воды T_w, с — постоянная времени запуска воды
Details
Постоянная времени инерции воды. Этот параметр связан с блоком, обозначенным на схеме как Lead-Lag.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент динамики затвора а_11 — коэффициент а_11 динамики затвора
Details
Коэффициент а_11 динамики затвора. Этот параметр связан с блоком, обозначенным на схеме как Lead-Lag.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент динамики затвора а_13 — коэффициент а_13 динамики затвора
Details
Коэффициент а_13 динамики затвора. Этот параметр связан с блоком, обозначенным на схеме как Lead-Lag.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент динамики затвора а_21 — коэффициент а_21 динамики затвора
Details
Коэффициент а_21 динамики затвора. Этот параметр связан с блоком, обозначенным на схеме как Lead-Lag.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# Коэффициент динамики затвора а_23 — коэффициент а_23 динамики затвора
Details
Коэффициент а_23 динамики затвора. Этот параметр связан с блоком, обозначенным на схеме как Lead-Lag.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |