Absolute Rotational Motion Sensor
机械旋转系统中的运动传感器。
模块类型: AcausalFoundation.Mechanical.Rotational.Sensors.Motion
|
Absolute Rotational Motion Sensor 库中的路径: |
|
Relative Rotational Motion Sensor 库中的路径: |


资料描述
座 Absolute Rotational Motion Sensor 它是机械旋转运动的传感器,即当在两个旋转机械节点之间打开时,产生与加速度,角速度或位置(角度)成比例的信号的设备。 初始角位置(偏移量)可以设置为块参数。
R*和*C*连接是旋转机械端口,将设备连接到执行测量的节点。 块的正方向是从端口*R*到端口*C。 这意味着速度被测量为 ,在哪里 , -分别在端口*R*和*C*处的绝对角速度。 参数 Measurement type 允许您断开*C*端口并进行相对于地面的测量。
连接*α*、*W*和*A*分别是角加速度、速度和位移的输出端口。 这些端口的可见性由块参数控制。 如果打开*α*端口,则单元会执行额外的计算以根据速度测量加速度。 为避免使模型复杂化,建议仅包含实际用于测量的那些端口。
参数 Wrap angle to [0, 2*pi] 允许您控制角位移的输出范围。 启用此参数时,角度偏移量存储在以下范围内 0 以前 2π 弧度(360 度),而与对象执行的转数和旋转方向无关。 当参数被禁用时,输出范围是无限的。
图为这两个选项的区别。
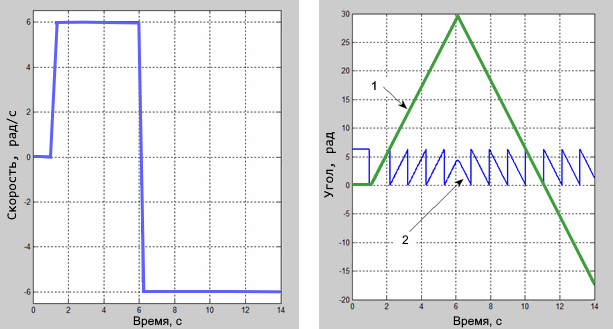
在此示例中,对象以以下速度移动 6 rad/s在一个积极的方向在第一 5 秒,然后以相同的速度在负方向切换。 默认的角度偏移输出(第1行)表示对象已通过 30 我很高兴,然后转回负方向,继续移动,直到 −20 很高兴。 如果你选中了这个框 Wrap angle to [0, 2*pi] ,输出数据(第2行)将保持在范围内 0 以前 2π 很高兴。
选中此框 Wrap angle to [0, 2*pi] 简化了模型参数和旋转角度之间具有复杂依赖关系的模型的开发,例如泵和电机。
港口
参数
参数
#
Measurement type —
在绝对测量和相对测量之间进行选择
Relative | Absolute
Details
在绝对测量和相对测量之间进行选择:
-
Relative-测量端口*R*相对于端口*C*的加速度,速度和位置。 -
Absolute-断开端口*C*并测量端口*R*相对于地面的加速度,速度和位置(内部参考节点)。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# Acceleration — 使能用于测量角加速度的输出端口
Details
当选择此选项时,输出端口*α*打开,这允许您测量角加速度。 使用*α*端口还需要额外的计算来根据速度测量加速度,因此默认情况下禁用此端口。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# Velocity — 使能用于测量角速度的输出端口
Details
选择此选项后,将启用输出端口*W*,这允许您测量角速度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# Position — 启用用于测量角位移的输出端口
Details
选择此选项时,将启用输出端口*A*,这允许您测量位置(角位移)。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# Wrap angle to [0, 2*pi] — 限制角位移输出信号的范围
Details
如果选择此选项,传感器输出的角位移保持在 0 以前 2π 弧度(360 度),而与对象执行的转数和旋转方向无关。
如果未选择此选项,则输出范围是无限的。
选择此选项可以简化模型参数和旋转角度之间关系复杂的模型的开发,例如泵和电机。
依赖关系
若要使用此选项,请选中该选项的复选框 Position .
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
#
Initial angle —
初始传感器偏移
rad | deg | rev | mrad | arcsec | arcmin | gon
Details
传感器的初始角位置(偏移量)。
依赖关系
若要使用此选项,请选中该选项的复选框 Position .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |