Machine Mechanical Power
Mechanical load defined in the SI system or in relative units.
blockType: AcausalElectricPowerSystems.Electromechanical.Mechanical.Power
|
Path in the library: |

Description
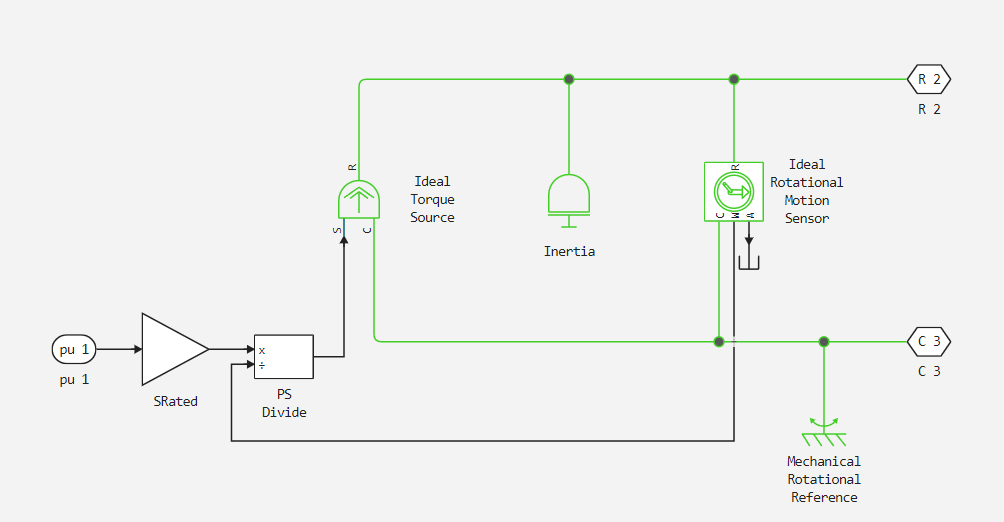
The Machine Mechanical Power unit consumes or generates a specified mechanical power for the electrical machine to which it is connected. The unit contains an in-built connection to a mechanical rotary network reference point and also simulates the inertia of the machine.
In generator mode, the input physical signal determines the mechanical power that is applied to the machine. In motor mode, it determines the mechanical power at the output of the machine.
The figure shows an equivalent model of the Machine Mechanical Power block using mechanical rotational components.
Electrical equations
The SI model converts values in SI units that you enter in the dialogue box into values in relative units for simulation.
To calculate the torque applied to the inertial mass, the unit divides the required power by the current speed. To set a peak torque limit, specify a value for Peak torque to rated torque ratio.
Use the Specify inertia parameterization by parameter to specify the inertia directly or using the machine’s constant inertia .
If you specify the inertia constant for the machine, the unit calculates the inertia as
,
where:
-
- moment of inertia, kg*m2.
-
- inertia constant, cV/Va.
-
- nominal total power of the connected machine, VA.
-
- nominal electrical frequency of the connected machine, Hz.
-
- number of pole pairs of the machine.
Damping is the viscous friction between the machine rotor and the reference point of the mechanical rotating network. Depending on the value selected for Specify damper parameterization by, you specify the damping factor in relative units or in SI units. If you specify a damping factor in relative units, the unit calculates the damping factor in SI units using these equations:
,
,
,
and
,
Where:
-
- basic mechanical speed, rad/s.
-
- basic damping torque, Nm.
-
- basic damping coefficient, Nm/(rad/s).
-
- damping coefficient, o.e.
-
- damping coefficient, Nm/(rad/s).
Ports
Parameters
Main
Input power sign convention - unit type
Generator (by default) | Motor
Unit type:
-
Generator- a positive value on input Pm_si or Pm_pu corresponds to the output of mechanical power. -
Motor- positive value on input Pm_si or Pm_pu corresponds to mechanical power consumption.
Rated apparent power, VA - rated apparent power
55e6 V*A (by default).
Rated power.
Rated electrical frequency, Hz - rated electrical frequency, Hz
50 Hz (by default).
The rated electrical frequency for which the rated total power is specified.
Number of pole pairs - number of pole pairs
1 (By default).
Number of pole pairs of the machine.
Input unit - system of units for measuring physical signals
SI (By default) | Per unit.
The unit system for measuring physical signals. Select one of the options:
-
SI- International System of Units. Selecting this value allows the Pm_si input port to be used. -
Per unit- relative unit system. Selecting this value allows the Pm_pu input port to be used.
Peak torque to rated torque ratio - peak torque to rated torque ratio
2 (By default).
A factor that the unit multiplies by the base torque to provide an upper limit on inertia accelerating torque.
Inertia
Specify inertia parameterization by - inertia parameterization
Inertia constant, H (by default) | Actual Inertia, J
Inertia type.
-
Inertia constant, His the inertia constant. -
Actual Inertia, J- actual rotational mechanical inertia of the machine rotor.
*Inertia constant, H is the constant of inertia
`3.525 s*W/VA (by default).
Inertia constant.
Dependencies
Used when Specify inertia parameterization by is set to Inertia constant, H.
Actual inertia, J - actual inertia
27548 kg*m^2 (by default).
Actual rotational mechanical inertia of the machine rotor. This parameter is only visible if the inertia parameterization by Specify inertia is set to Actual inertia, J.
Dependencies
Used when Specify inertia parameterization by is set to Actual Inertia, J.
Specify damper parameterization by - damping parameterization
Per-unit damping coefficient, pu_D (by default) | SI damping coefficient, D.
Unit type for the damping coefficient.
-
Per-unit damping coefficient, pu_D (by default)is the damping coefficient in relative units. -
SI damping coefficient, D- damping coefficient in SI units.
Per-unit damping coefficient, D_pu - damping coefficient, o.u.
0.01 (by default).
Damping coefficient in relative units.
Dependencies
Used when Specify damper parameterization by is set to Per-unit damping coefficient, pu_D.
SI damping coefficient, D - damping coefficient
39.0509 Nm/(rad/s) (by default).
Damping coefficient in SI units.
Dependencies
Used when Specify damper parameterization by is set to SI damping coefficient, D.
Initial Conditions
Specify initialisation by - frequency initialisation
Initial electrical frequency (by default) | Initial mechanical frequency
Frequency type.
-
Initial electrical frequency- electrical frequency. -
Initial mechanical frequency- mechanical frequency.
*Initial electrical frequency - initial value of electrical frequency
50 Hz (By default).
Initial electrical frequency value.
Dependencies
Used when Specify initialisation by is set to Initial electrical frequency.
Initial mechanical frequency - initial value of mechanical frequency
50 Hz (By default).
Initial value of mechanical frequency.
Dependencies
Used when Specify initialisation by is set to Initial mechanical frequency.