Колесо и ось
Колесо и ось.
Тип: AcausalFoundation.Mechanical.Mechanisms.WheelAndAxle
|
Путь в библиотеке: |
Описание
Блок Колесо и ось представляет механизм колеса и оси, показанный на следующей схеме.
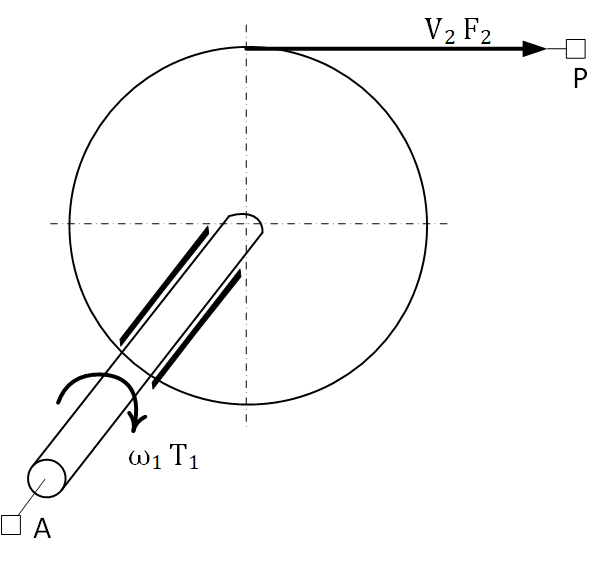
Колесо и ось соосны, причем предполагается, что ось жестко связана с рамой, что делает этот механизм идеальным преобразователем механического вращательного движения в механическое поступательное. Механизм имеет два соединения: механический вращательный порт А, соответствующий оси, и механический поступательный порт Р, соответствующий точке на ободе колеса. Механизм описывается следующими уравнениями:
где:
-
— крутящий момент на оси.
-
— сила на ободе колеса.
-
— угловая скорость колеса.
-
— линейная скорость на ободе колеса.
-
— радиус колеса.
-
— ориентация механизма. Значение равно
+1, если вращение оси в глобально заданном положительном направлении преобразуется в поступательное движение в положительном направлении, и−1, если положительное вращение приводит к поступательному движению в отрицательном направлении.
Используйте блок при моделировании реечных шестерен, рулевых колес, подъемных устройств, лебедок и т.д.
Положительные направления блока — от А к опорной точке и от опорной точки к Р.
Порты
A — ось
вращательная механика
Механический вращательный порт, соответствует оси.
P — периферия колеса
поступательная механика
Механический поступательный порт, соответствует точке на ободе колеса.
Параметры
Wheel radius — радиус колеса
0.05 м (по умолчанию)
Радиус колеса.
Mechanism orientation — связь между вращением оси и направлением поступательного движения
Drives in positive direction (по умолчанию)| Drives in negative direction
Значение Drives in positive direction означает, что вращение оси в глобально назначенном положительном направлении преобразуется в поступательное движение в положительном направлении. Значение Drives in negative direction означает, что вращение оси в глобально назначенном положительном направлении преобразуется в поступательное движение в отрицательном направлении.