Жесткий поступательный ограничитель
Двусторонний поступательный жесткий ограничитель.

Описание
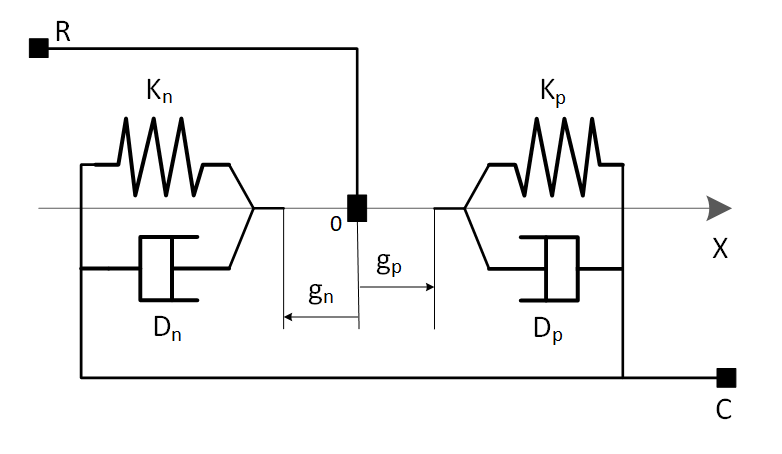
Блок Жесткий поступательный ограничитель представляет двухсторонний механический поступательный жесткий ограничитель, ограничивающий движение тела между верхней и нижней границами. Предполагается, что ударное взаимодействие штока и ограничителей является упругим. Ограничитель представлен в виде пружины, которая входит в контакт со штоком при устранении зазора. Пружина противодействует движению штока внутрь ограничителя с силой, линейно пропорциональной величине этого движения. Для учета рассеивания энергии и неупругих эффектов в качестве параметра блока вводится демпфирование, что позволяет учитывать потери энергии. На схеме показана идеализация механического ограничителя поступательного движения, принятая в блоке.
Базовая модель жесткой остановки Full stiffness and damping applied at bounds, damped rebound описывается следующими уравнениями:
,
где:
-
— сила взаимодействия между штоком и корпусом.
-
— начальный зазор между штоком и верхней границей.
-
— начальный зазор между штоком и нижней границей.
-
— положение штока.
-
— жесткость контакта на верхней границе.
-
— жесткость контакта на нижней границе.
-
— коэффициент демпфирования на верхней границе.
-
— коэффициент демпфирования на нижней границе.
-
— скорость штока.
-
— время.
В модели жесткой остановки Full stiffness and damping applied at bounds, undamped rebound уравнения содержат дополнительные члены и . Эти условия гарантируют, что при отскоке не применяется демпфирование.
Модель жесткой остановки по умолчанию Stiffness and damping applied smoothly through transition region, damped rebound добавляет к уравнениям две переходные области, по одной на каждой границе. Пока шток проходит через переходную область, блок плавно увеличивает усилие от нуля до полного значения. В конце переходной области применяются полная жесткость и демпфирование. При отскоке как жесткость, так и демпфирующие силы плавно уменьшаются до нуля. В этих уравнениях также используются функции сравнения ge и le.
Блок ориентирован от R к C. Это означает, что блок передает усилие от порта R к порту C, когда зазор закрыт в положительном направлении.
Порты
R — шток
поступательная механика
Механический поступательный порт, соответствующий штоку, который перемещается между ограничителями, установленными на корпусе.
C — корпус
поступательная механика
Механический поступательный порт, соответствующий корпусу.
Параметры
Upper bound, m — зазор между штоком и верхней границей
0.1 м (по умолчанию)
Зазор между штоком и верхней границей. Направление задается в локальной системы координат, при этом шток находится в начале координат. Положительное значение параметра определяет зазор между штоком и верхней границей. Отрицательное значение устанавливает шток как проникающий в верхнюю границу.
Lower bound, m — зазор между штоком и нижней границей
−0.1 м (по умолчанию)
Зазор между штоком и нижней границей. Направление задается в локальной системы координат, при этом шток находится в начале координат. Отрицательное значение параметра определяет зазор между штоком и нижней границей. Положительное значение устанавливает шток как проникающий в нижнюю границу.
Contact stiffness at upper bound, N/m — коэффициент упругости столкновения на верхней границе
1e6 Н/м (по умолчанию)
Этот параметр определяет свойство упругости столкновения, когда шток достигает верхней границы. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем жестче становится ограничитель. Меньшее значение параметра делает контакт мягче, но в целом улучшает сходимость и вычислительную эффективность.
Contact stiffness at lower bound, N/m — коэффициент упругости на нижней границе
1e6 Н/м (по умолчанию)
Этот параметр определяет свойство упругости при столкновении, когда шток достигает нижней границы. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем жестче становится ограничитель. Меньшее значение параметра делает контакт мягче, но в целом улучшает сходимость и вычислительную эффективность.
Contact damping at upper bound, N/(m/s) — коэффициент демпфирования на верхней границе
150.0 Н/(м/с) (по умолчанию)
Этот параметр определяет демпфирование при столкновении, когда шток достигает верхней границы. Чем больше значение параметра, тем больше энергии рассеивается при взаимодействии.
Contact damping at lower bound, N/(m/s) — коэффициент демпфирования на нижней границе
150.0 Н/(м/с) (по умолчанию)
Этот параметр определяет демпфирование при столкновении, когда шток достигает нижней границы. Чем больше значение параметра, тем больше энергии рассеивается при взаимодействии.
Hard stop model — выбор модели жесткой остановки
Stiffness and damping applied smoothly through transition region, damped rebound (по умолчанию) | Full stiffness and damping applied at bounds, undamped rebound | Full stiffness and damping applied at bounds, damped rebound
Выберите набор допущений при работе блока:
-
Stiffness and damping applied smoothly through transition region, damped rebound— задается переходная область, в которой сила сопротивления нарастает с нуля. В конце переходной области применяются полная жесткость и демпфирование. В этой модели применяется демпфирование при отскоке, но оно ограничено значением момента жесткости. В этом смысле демпфирование может уменьшить или устранить крутящий момент, обеспечиваемый жесткостью, но никогда не превышать его. Все уравнения являются гладкими. -
Full stiffness and damping applied at bounds, undamped rebound— эта модель обладает полной жесткостью и демпфированием, применяемыми при ударе на верхней и нижней границах, без демпфирования при отскоке. Уравнения не приводят к пересечению нуля, когда скорость меняет знак, но на границах есть пересечение нуля, основанное на положении. Отсутствие демпфирования при отскоке помогает быстро вывести шток из этого положения. Эта модель имеет нелинейные уравнения. -
Full stiffness and damping applied at bounds, damped rebound— эта модель имеет полную жесткость и демпфирование, применяемые при ударе на верхней и нижней границах, с демпфированием, применяемым и на отскоке тоже. Уравнения переключаются линейно, но приводят к пересечению нуля на основе положения.
Transition region, m — область, в которой сила увеличивается
0.1 мм (по умолчанию)
Область, в которой сила увеличивается от нуля до полного значения. В конце переходной области применяются полная жесткость и демпфирование.
Зависимости
Чтобы использовать этот параметр, установите для параметра Hard stop model значение Stiffness and damping applied smoothly through transition region, damped rebound.
Initial Targets
Initial value of velocity, m/s — начальное значение скорости
0.0 (по умолчанию)
Начальное значение скорости.
Initial value of force, N — начальное значение силы
0.0 (по умолчанию)
Начальное значение силы.
Initial value of position, m — начальное значение положения
0.0 (по умолчанию)
Начальное значение положения.