Дескриптор BRIEF
BRIEF (Binary Robust Independent Elementary Features, двоичные устойчивые независимые элементарные признаки) — это эффективный дескриптор точек признаков. Он обладает высокой дискриминационной способностью даже при использовании относительно небольшого количества бит и вычисляется с помощью простых тестов на разницу интенсивности. BRIEF не имеет шаблона выборки, поэтому пары можно выбирать в любой точке участка SxS.
Для построения дескриптора BRIEF длиной n необходимо определить n пар (Xi,Yi). Обозначим векторы точек Xi и Yi соответственно X и Y.
В ImageFeatures.jl есть пять методов для определения векторов X и Y:
-
random_uniform:XиYвыбираются равномерно случайным образом. -
gaussian:XиYвыбираются случайным образом с использованием гауссова распределения; это означает, что предпочтение отдается местоположениям ближе к центру участка. -
gaussian_local:XиYвыбираются случайным образом с использованием гауссова распределения, причем сначала выбираетсяXсо среднеквадратичным отклонением0.04*S^2, а затем выбираютсяYi’sс использованием гауссова распределения — каждая точкаYiвыбирается со средним значениемXiи среднеквадратичным отклонением0.01 * S^2. -
random_coarse:XиYвыбираются случайным образом из дискретного местоположения на грубой полярной сетке. -
center_sample: для каждогоiXiравно(0, 0), аYiпринимает все возможные значения на грубой полярной сетке.
Как и в случае с другими двоичными дескрипторами, мерой расстояния BRIEF является количество разных бит между двумя двоичными строками. Его также можно вычислить как сумму операции XOR между строками.
BRIEF — очень простой дескриптор признаков, не обеспечивающий инвариантности к масштабу или повороту (только инвариантность к сдвигу). Если вам нужны эти свойства, см. примеры дескрипторов ORB, BRISK и FREAK.
Пример
Давайте рассмотрим простой пример, в котором дескриптор BRIEF используется для сопоставления двух изображений, одно из которых было смещено на (100, 200) пикселей. В этом примере используется изображение lighthouse из пакета TestImages.
Теперь создадим два изображения, которые будут сопоставляться с помощью BRIEF.
using ImageFeatures, TestImages, Images, ImageDraw, CoordinateTransformations
img = testimage("sudoku")
img1 = Gray.(img)
trans = Translation(-50, -50)
img2 = warp(img1, trans, axes(img1))
Для вычисления дескрипторов сначала нужно получить ключевые точки. В этом руководстве мы будем использовать углы FAST для генерирования ключевых точек (см. описание функции fastcorners).
keypoints_1 = Keypoints(fastcorners(img1, 12, 0.4))
keypoints_2 = Keypoints(fastcorners(img2, 12, 0.4))123-element Vector{CartesianIndex{2}}:
CartesianIndex(254, 214)
CartesianIndex(203, 254)
CartesianIndex(439, 267)
CartesianIndex(444, 267)
CartesianIndex(437, 268)
CartesianIndex(445, 268)
CartesianIndex(436, 269)
CartesianIndex(434, 271)
CartesianIndex(448, 271)
CartesianIndex(436, 277)
⋮
CartesianIndex(295, 489)
CartesianIndex(279, 490)
CartesianIndex(294, 490)
CartesianIndex(287, 491)
CartesianIndex(293, 491)
CartesianIndex(429, 498)
CartesianIndex(430, 499)
CartesianIndex(431, 500)
CartesianIndex(408, 505)Чтобы создать дескриптор BRIEF, сначала нужно определить параметры, вызвав конструктор BRIEF.
brief_params = BRIEF(size = 256, window = 10, seed = 123)BRIEF{typeof(gaussian)}(256, 10, 1.4142135623730951, ImageFeatures.gaussian, 123)Теперь передайте изображение с ключевыми точками и параметрами в функцию create_descriptor.
desc_1, ret_keypoints_1 = create_descriptor(img1, keypoints_1, brief_params)
desc_2, ret_keypoints_2 = create_descriptor(img2, keypoints_2, brief_params)(BitVector[[1, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 0, 1, 1, 0, 0, 1, 1, 0, 1, 1], [1, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 0, 0, 1, 1, 1, 1, 1, 0, 1, 0], [1, 1, 0, 1, 1, 1, 1, 1, 1, 0 … 0, 1, 1, 0, 1, 1, 1, 0, 1, 1], [0, 0, 1, 0, 1, 1, 1, 1, 1, 0 … 0, 1, 1, 0, 1, 1, 0, 0, 1, 0], [0, 0, 0, 1, 1, 1, 1, 1, 1, 0 … 0, 1, 1, 0, 1, 1, 1, 0, 1, 1], [0, 0, 1, 0, 1, 0, 1, 1, 0, 0 … 0, 1, 1, 0, 0, 1, 0, 0, 1, 0], [0, 0, 0, 1, 1, 1, 1, 1, 1, 0 … 0, 1, 1, 0, 1, 1, 1, 0, 1, 1], [0, 0, 0, 1, 0, 1, 1, 1, 1, 1 … 0, 0, 1, 0, 1, 1, 1, 0, 1, 0], [0, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 1, 0, 1, 0, 0, 1, 0, 1, 1, 0], [0, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 0, 1, 1, 0, 1, 1, 0, 0, 1, 0] … [0, 0, 0, 1, 0, 1, 1, 0, 1, 1 … 1, 1, 1, 0, 1, 1, 1, 0, 1, 0], [0, 1, 0, 0, 1, 1, 0, 1, 1, 1 … 1, 1, 1, 0, 1, 1, 1, 0, 1, 0], [0, 0, 1, 0, 1, 0, 1, 1, 0, 0 … 1, 1, 1, 1, 0, 1, 0, 0, 0, 1], [0, 1, 0, 0, 1, 1, 1, 1, 1, 1 … 0, 1, 0, 1, 1, 1, 1, 0, 1, 1], [1, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 0, 1, 1, 0, 0, 1, 0, 0, 1, 1], [0, 0, 0, 0, 1, 1, 1, 1, 0, 1 … 0, 1, 0, 1, 1, 1, 1, 0, 0, 1], [0, 0, 1, 0, 1, 0, 1, 1, 0, 0 … 0, 1, 1, 0, 0, 1, 0, 0, 1, 0], [0, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 0, 0, 1, 0, 0, 1, 0, 1, 1, 0], [0, 0, 0, 1, 0, 0, 1, 1, 1, 0 … 1, 0, 1, 0, 0, 1, 0, 1, 1, 0], [0, 0, 0, 1, 0, 0, 0, 1, 1, 1 … 1, 1, 1, 1, 1, 1, 1, 0, 0, 0]], CartesianIndex{2}[CartesianIndex(254, 214), CartesianIndex(203, 254), CartesianIndex(439, 267), CartesianIndex(444, 267), CartesianIndex(437, 268), CartesianIndex(445, 268), CartesianIndex(436, 269), CartesianIndex(434, 271), CartesianIndex(448, 271), CartesianIndex(436, 277) … CartesianIndex(296, 487), CartesianIndex(295, 489), CartesianIndex(279, 490), CartesianIndex(294, 490), CartesianIndex(287, 491), CartesianIndex(293, 491), CartesianIndex(429, 498), CartesianIndex(430, 499), CartesianIndex(431, 500), CartesianIndex(408, 505)])Полученные дескрипторы можно использовать для поиска соответствий между двумя изображениями с помощью функции match_keypoints.
matches = match_keypoints(ret_keypoints_1, ret_keypoints_2, desc_1, desc_2, 0.1)123-element Vector{Vector{CartesianIndex{2}}}:
[CartesianIndex(204, 164), CartesianIndex(254, 214)]
[CartesianIndex(153, 204), CartesianIndex(203, 254)]
[CartesianIndex(389, 217), CartesianIndex(439, 267)]
[CartesianIndex(394, 217), CartesianIndex(444, 267)]
[CartesianIndex(387, 218), CartesianIndex(437, 268)]
[CartesianIndex(395, 218), CartesianIndex(445, 268)]
[CartesianIndex(386, 219), CartesianIndex(436, 269)]
[CartesianIndex(384, 221), CartesianIndex(434, 271)]
[CartesianIndex(398, 221), CartesianIndex(448, 271)]
[CartesianIndex(386, 227), CartesianIndex(436, 277)]
⋮
[CartesianIndex(245, 439), CartesianIndex(295, 489)]
[CartesianIndex(229, 440), CartesianIndex(279, 490)]
[CartesianIndex(244, 440), CartesianIndex(294, 490)]
[CartesianIndex(237, 441), CartesianIndex(287, 491)]
[CartesianIndex(243, 441), CartesianIndex(293, 491)]
[CartesianIndex(379, 448), CartesianIndex(429, 498)]
[CartesianIndex(380, 449), CartesianIndex(430, 499)]
[CartesianIndex(381, 450), CartesianIndex(431, 500)]
[CartesianIndex(358, 455), CartesianIndex(408, 505)]Просмотреть результаты можно с помощью пакета ImageDraw.jl.
grid = hcat(img1, img2)
offset = CartesianIndex(0, size(img1, 2))
map(m -> draw!(grid, LineSegment(m[2] + offset,m[1] )), matches)
grid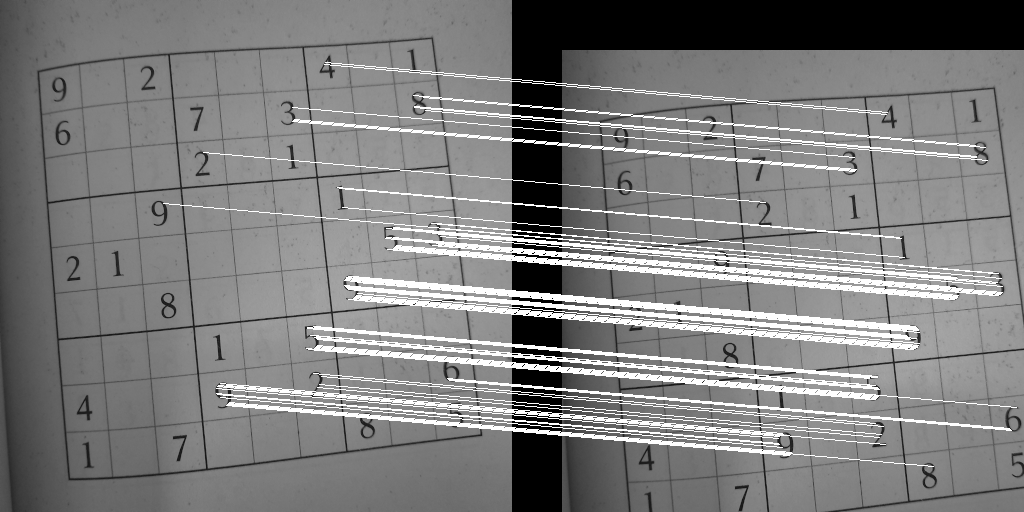
grid выводит результаты
Эта страница была создана с помощью DemoCards.jl и Literate.jl.