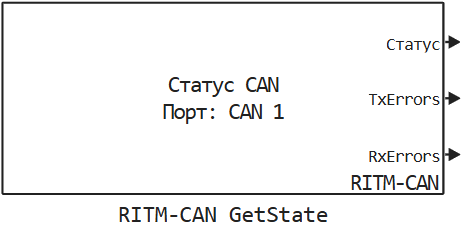
RITM-CAN GetState
Получение информации о состоянии CAN интерфейса и числе ошибок ввода-вывода.
Тип: SubSystem
|
Путь в библиотеке: |
Описание
| Для работы с блоком установите/обновите пакет поддержки блоков РИТМ. |
Блок RITM-CAN GetState используется для получения информации о состоянии CAN интерфейса и числе ошибок ввода-вывода.
Порты
Выход
#
Статус
—
текущее состояние порта (шина из нескольких сигналов)
шина
Details
Значение сигнала 1 в шине означает, что соответствующее состояние активно.
-
ACTIVE — приемопередатчик исправен, число ошибок меньше
96. -
WARNING — число ошибок меньше
128. -
PASSIVE — приемопередатчик прекращает активное исправление ошибочного трафика на линии, число ошибок меньше
256. -
BUS_OFF — приемопередатчик прекращает участие в обмене, число ошибок больше
256. -
STOPPED — приемопередатчик остановлен.
-
SLEEPING — приемопередатчик в спящем режиме.
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
TxErrors
—
число ошибок при передаче
скаляр
Details
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
#
RxErrors
—
число ошибок при приеме
скаляр
Details
| Типы данных |
|
| Поддержка комплексных чисел |
Нет |
Параметры
Main group
#
Интерфейс CAN: —
порт CAN
CAN 1 | CAN 2 | CAN 3 | CAN 4 | CAN 5 | CAN 6 | CAN 7 | CAN 8
Details
Порт CAN, информацию о состоянии которого нужно получить.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Настраиваемый |
Нет |
| Вычисляемый |
Да |
# Шаг расчёта, с: — шаг расчета в секундах для опроса состояния из приложения реального времени
Details
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Настраиваемый |
Нет |
| Вычисляемый |
Да |