Governor Type 1
具有IEEE1型速度控制器的液压涡轮机的线性化模型。
模块类型: SubSystem
|
库中的路径: |

资料描述
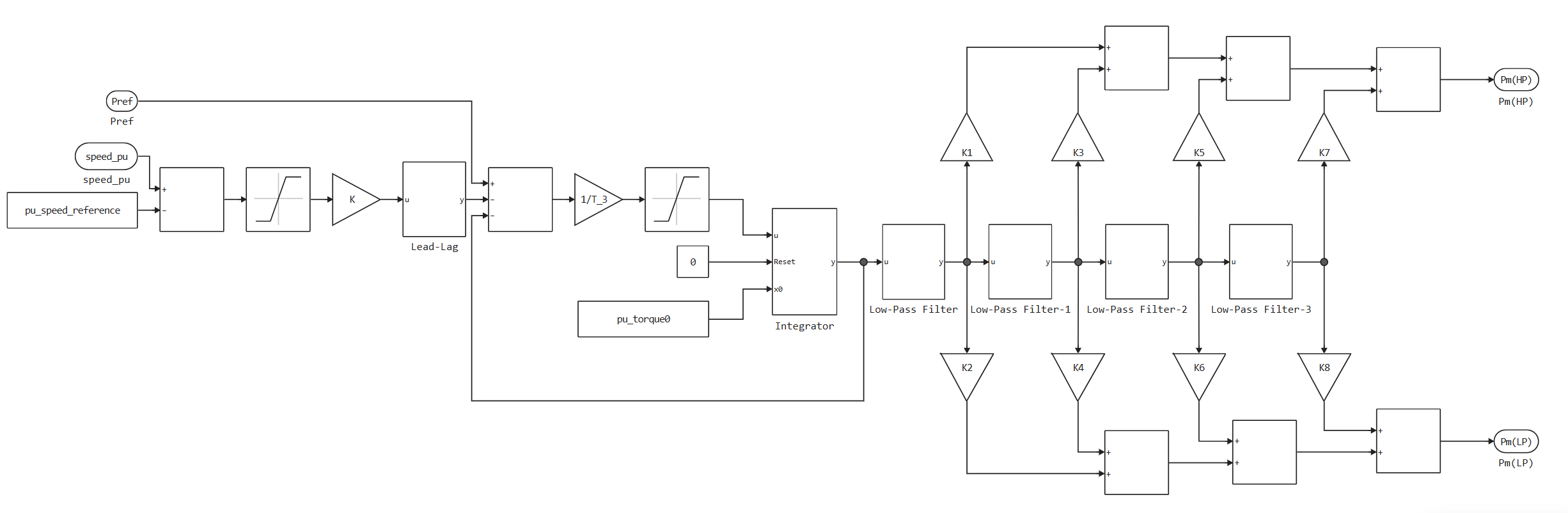
座 Governor Type 1 它是带有IEEEG1速度控制器的汽轮机的模型。
该装置允许您模拟双轴涡轮机,并具有两组分数。:
LP级分,K_2*,LP级分,K_4,LP级分,K_6,LP级分,k_8*用于低压(LP)。 HP分数,K_1,HP分数,K_3,HP分数,K_5,*HP分数,k_7*用于高压(HP)。
该图说明了块的一般结构。:
港口
输入
#
ω
—
涡轮转速
标量,标量
Details
相对单位的涡轮转速,设置为标量。
| 数据类型 |
|
| 复数支持 |
非也。 |
#
Pref
—
基准速度的位移
标量,标量
Details
施加于设定涡轮调节器的负载速度的偏移作为标量返回。 将此端口连接到涡轮负载调节器单元的输出端口*Pref*,例如, Controller LCFB1
| 数据类型 |
|
| 复数支持 |
非也。 |
参数
主组
# Speed reference, pu — 设定速度
Details
相对单位的速度标准。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Initial torque, pu — 初始扭矩
Details
模拟开始时的每单位初始扭矩。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
主要的
# Governor gain K, pu — 调节器增益因子
Details
调节器的增益。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Lag time constant T_1, s — 调节器的延迟时间常数
Details
的等效延迟时间常数。 此参数与图中标示为*Lead-Lag*的块相关联。 将此参数设置为 0 如果附加滞后动态可以忽略不计。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Lead time constant T_2, s — 调节器的时间常数提前
Details
的等效提前时间常数。 此参数与图中标示为*Lead-Lag*的块相关联。 将此参数设置为 0 如果额外的提前动态可以忽略不计。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Valve position time constant T_3, s — 阀门位置时间常数
Details
阀位置的时间常数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Maximum valve opening rate U_o, pu/s — 最大阀门开启速度
Details
阀的最大开启速度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Maximum valve closing rate U_c, pu/s — 阀门的最大关闭速度
Details
阀的最大关闭速度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Maximum valve opening, on MW capability P_max, pu — 最大阀门开度O.E.,功率P-max
Details
最大阀门开度O.E.,在功率P-max。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Minimum valve opening, on MW capability P_min, pu — 最小阀门开度O.E.,在功率P-min
Details
最小阀门开度O.E.,在功率P-min。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Time constant for steam inlet T_4, s — 入蒸汽的时间常数
Details
的蒸汽进气时间常数。 该参数与图中标示为*低通滤波器*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# HP fraction K_1 — 高压轴的功率等级,K_1
Details
锅炉第一次通过后高压轴的动力程度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# LP fraction K_2 — 低压轴的功率等级,K_2
Details
锅炉第一次通过后低压轴的动力程度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Time constant for second boiler pass T_5, s — 第二锅炉通过的时间常数
Details
第二锅炉通过的时间常数。 此参数与图中标示为*Low-Pass Filter1*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# HP fraction, K_3 — 高压轴的功率等级,K_3
Details
锅炉二次通过后高压轴的动力程度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# LP fraction, K_4 — 低压轴的功率等级,K_4
Details
锅炉第二通路后的低压轴的功率水平。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Time constant for third boiler pass T_6, s — 第三次锅炉通过的时间常数
Details
第三锅炉通过的时间常数。 该参数与图中标示为*Low-Pass Filter2*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# HP fraction, K_5 — 高压轴的功率等级,K_5
Details
锅炉第三通路后高压轴的动力程度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# LP fraction, K_6 — 低压轴的功率等级,K_6
Details
锅炉第三通路后的低压轴的功率水平。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Time constant for fourth boiler pass T_7, s — 第四锅炉通过的时间常数
Details
第四锅炉通过的时间常数。 该参数与图中标示为*Low-Pass Filter3*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# HP fraction, K_7 — 高压轴的功率等级,K_7
Details
锅炉第四通路后高压轴的动力程度。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# LP fraction, K_8 — 低压轴的功率等级,K_8
Details
锅炉第四通路后的低压轴的功率水平。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Deadband — 死区的宽度
Details
死区的指定宽度是从*+死区*到*-死区*。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
文学作品
-
"电力系统研究中的蒸汽和水轮机动力学模型,IEEE电力设备和系统交易。"卷。 PAS-92,编号6,1973,第1904-1915页。
-
"Task Force on Turbine-Governor Modeling,Dynamic models for turbine-governor in power system studies",IEEE Power Energy Society,January2013.
-
"ieee Guide for The Application Of Turbine Governor Systems for Hydrolelectric Generating Units",IEEE Std1207-2011.