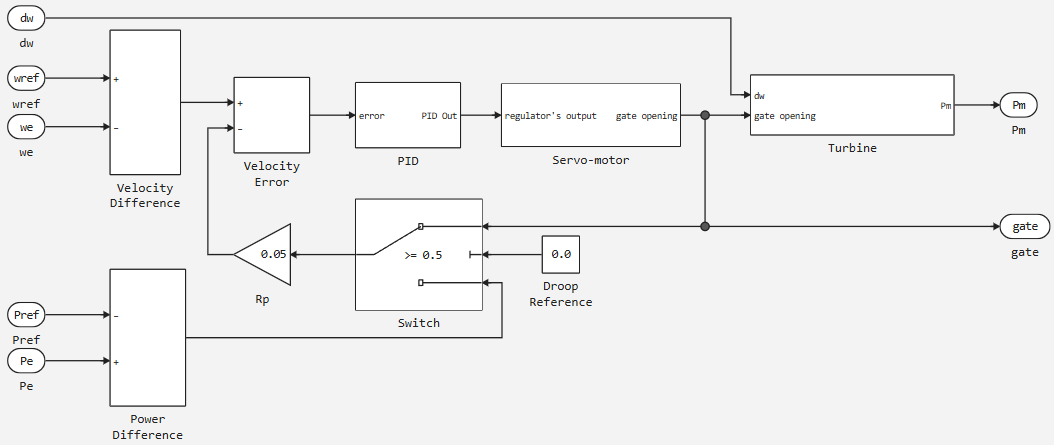
Hydraulic Turbine and Governor
水轮机模型和比例-积分-派生 (PID) 控制系统。
模块类型: SubSystem
|
库中的路径: |


端口
输入
#
ωe
—
实际机器速度
尺度
Details
机器的实际速度,以相对单位表示。
| 数据类型 |
|
| 复数支持 |
无 |
#
Δω
—
速度偏差
尺度
Details
以相对单位表示的速度偏差。
| 数据类型 |
|
| 复数支持 |
无 |
#
ωref
—
参考转速
标量
Details
以相对单位表示的参考速度。
| 数据类型 |
|
| 复数支持 |
无 |
#
闸门
—
闸门
尺度
Details
以相对单位表示的快门开度。
| 数据类型 |
|
| 复数支持 |
无 |
#
Pref
—
参考机械功率
标量
Details
以相对单位表示的参考机械功率。如果希望将栅极位置作为反馈电路的输入,而不是功率抑制,则可以省略此输入。
| 数据类型 |
|
| 复数支持 |
无 |
参数
主要的
# Servo-motor [Ka Ta(s)] — 一阶系统的增益和时间常数
Details
代表伺服驱动器的一阶系统的增益 和时间常数 ,单位为秒 (s)。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Gate opening limits [gmin(pu) gmax(pu) vgmin(pu/s) vgmax(pu/s)] — 快门开启限制
Details
和 (pu) 对闸门开度的限制,以及 和 ( ) 对闸门速度的限制。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Permanent droop and regulator [Rp Kp Ki Kd Td(s)] — 恒定节流阀和调节器
Details
调节器的静态增益等于反馈电路中恒定衰减 的倒数。PID 控制器具有比例增益 、积分增益 和导数增益 。PID 控制器的高频增益受时间常数为 (s) 的一阶低通滤波器限制。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
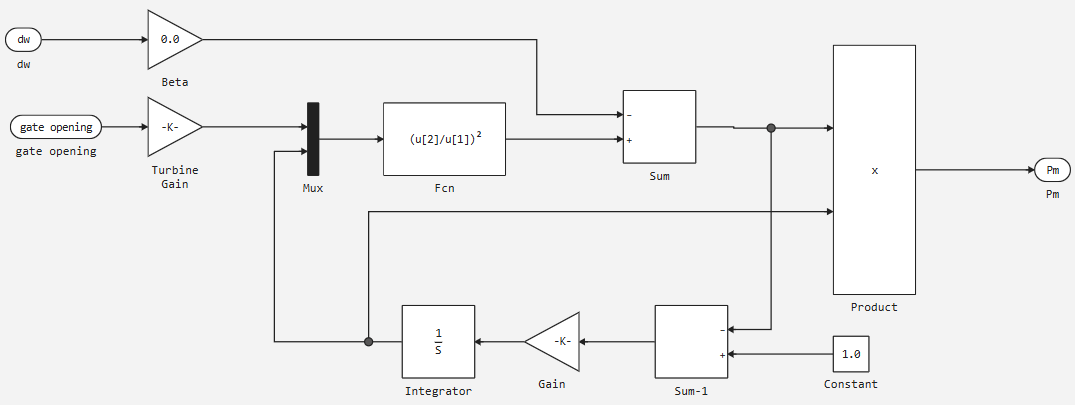
# Hydraulic turbine [beta Tw(s)] — 速度偏差阻尼系数和水启动时间
Details
速度偏差阻尼系数 和水启动时间 (秒)。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Droop reference (0=power error, 1=gate opening) — 反馈回路输入
Details
反馈回路输入:闸门位置 (1) 或电力偏差 (0)。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
初始值
# Initial mechanical power, pu — 初始机械动力
Details
以相对单位表示的初始机械功率。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |