Governor Type 3
具有IEEE3型速度控制器的液压涡轮机的线性化模型。
模块类型: SubSystem
|
库中的路径: |

资料描述
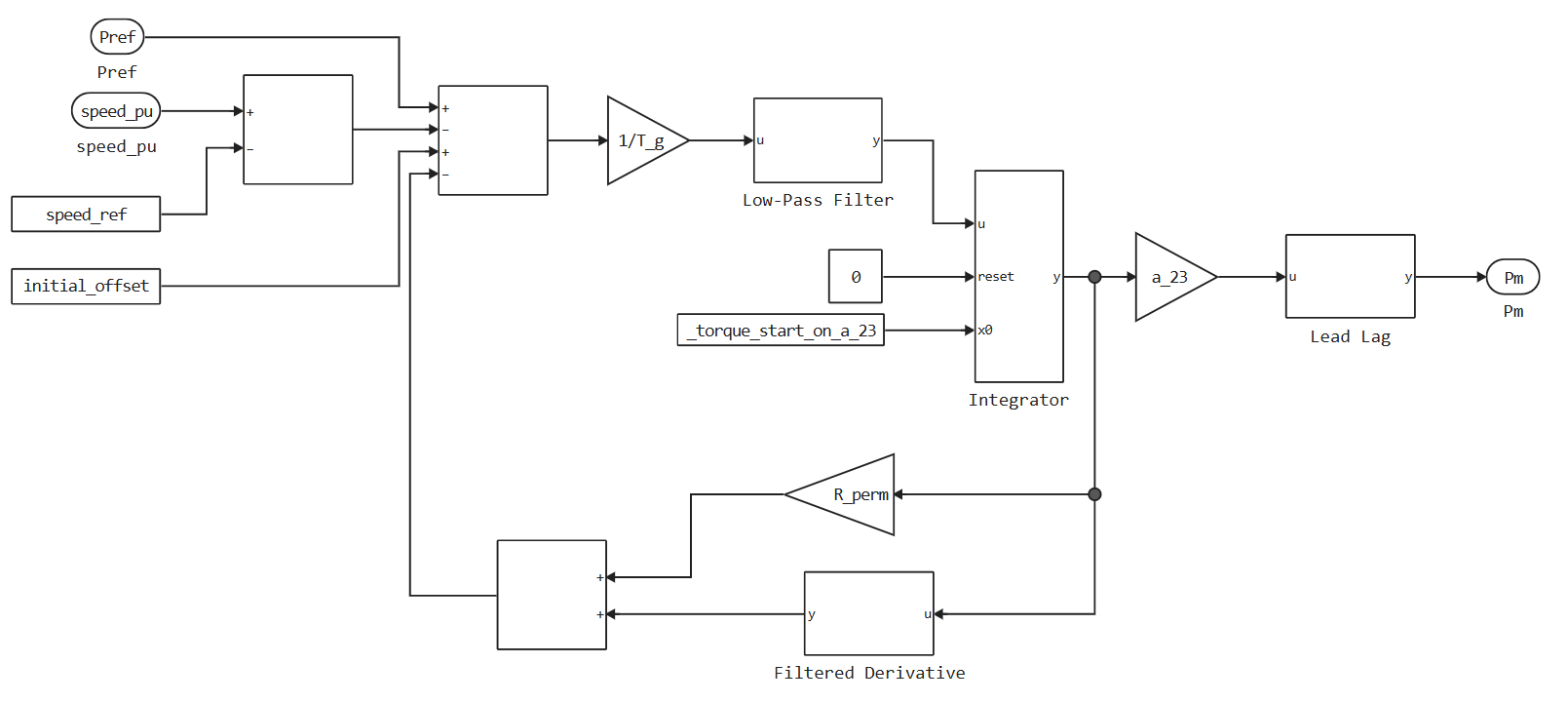
座 Governor Type 3 它是与压力管道动力学的IEEEG3水力涡轮调整器的模型。
该单元具有比*调速器类型1*单元更详细的调节器模型,并使用线性化涡轮机模型或水柱模型和压力管道动力学。
该图说明了块的一般结构。:
港口
输入
#
ω
—
涡轮转速
标量,标量
Details
相对单位的涡轮转速,设置为标量。
| 数据类型 |
|
| 复数支持 |
非也。 |
#
Pref
—
基准速度的位移
标量,标量
Details
施加于设定涡轮调节器的负载速度的偏移作为标量返回。
将此端口连接到涡轮负载调节器单元的输出端口*Pref*,例如, Controller LCFB1.
| 数据类型 |
|
| 复数支持 |
非也。 |
输出
#
Pm
—
机械动力
标量,标量
Details
机械动力作为标量返回。
| 数据类型 |
|
| 复数支持 |
非也。 |
参数
主要的
# Speed reference, pu — 速度设定
Details
相对单位的速度标准。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Initial torque, pu — 初始扭矩
Details
模拟开始时以相对单位为单位的初始扭矩。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
主要的
# Gate servomotor time constant T_g, s — 液压涡轮导向装置的伺服电机的时间常数
Details
液压涡轮导向单元的伺服电机的时间常数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Pilot value time constant T_p, s — 控制信号的时间常数
Details
控制信号的时间常数。 该参数与图中标示为*低通滤波器*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Opening gate rate limit U_o, pu/s — 快门速度限制
Details
快门打开速度的极限为一。 该参数与图中标示为*低通滤波器*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Closing gate rate limit U_c, pu/s — 快门速度限制
Details
快门关闭速度的极限为一。 该参数与图中标示为*低通滤波器*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Maximum gate position, on MVA capability P_max, pu — 最大阀门开度O.E.,功率P-max
Details
最大阀门开度O.E.,在功率P-max。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Minimum gate position, on MVA capability P_min, pu — 最小阀门开度O.E.,在功率P-min
Details
最小阀门开度O.E.,在功率P-min。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Permanent speed droop coefficient R_perm, pu — 相对单位的静态速度系数
Details
相对单位的静态速度系数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Transient speed droop coefficient R_temp, pu — 过渡期间的速度降低系数
Details
相对单位的过渡速度的降低系数。 该参数与图中标示为*滤波导数*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Governor time constant T_r, s — 调节器的时间常数
Details
调节器的时间常数。 该参数与图中标示为*滤波导数*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Water starting time constant T_w, s — 水启动时间常数
Details
水的惯性的时间常数。 此参数与图中标示为*Lead-Lag*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Penstock coefficient a_11 — 快门动力学系数a_11
Details
快门动力学系数_11_。 此参数与图中标示为*Lead-Lag*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Penstock coefficient a_13 — 快门动力学系数a_13
Details
的快门动力学系数_a_13_。 此参数与图中标示为*Lead-Lag*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Penstock coefficient a_21 — 快门动力学系数a_21
Details
快门动力学系数_a_21_。 此参数与图中标示为*Lead-Lag*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Penstock coefficient a_23 — 快门动力学系数a_23
Details
的快门动力学系数_a_23_。 此参数与图中标示为*Lead-Lag*的块相关联。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |