Inductive Rotor Position Sensor
电感式转子位置传感器,带有四个电感器。
模块类型: AcausalElectricPowerSystems.Sensors.InductiveRotorPosition
|
库中的路径: |

资料描述
座 Inductive Rotor Position Sensor 利用涡流损耗理论获得转子位置的数据。 传感器由四个扁平线圈和一个确定转子位置的导电盘组成。 传感器盘具有正弦形状并且由导电材料制成。 四个扁平线圈之间的距离相当于 90 度的一个周期。

方程
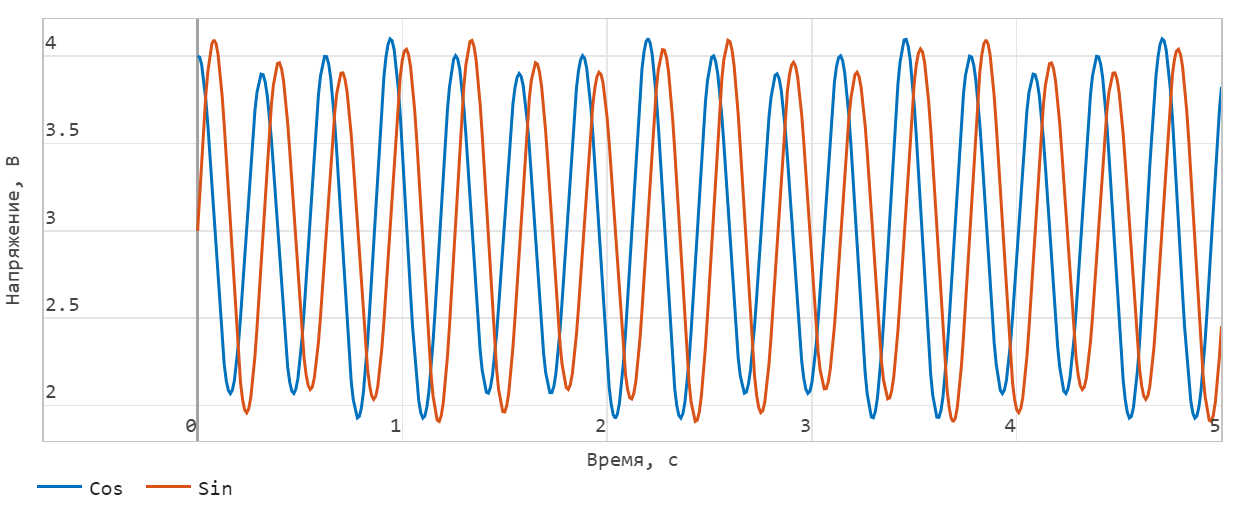
传感器元件之间的电压由方程描述:
哪里
-
-余弦电压;
-
-正弦电压;
-
和 -轴的电压幅度 和 反映灵敏度失配;
-
和 -轴的电压偏移 和 ,
-
-对极数;
-
-转子的角度;
-
-平方误差;
-
-不稳定系数。
角度的解码使用公式计算:
该图显示了不稳定系数的影响。:
变量
使用参数组 Initial Targets 在建模之前为块参数变量设置优先级和初始目标值。 有关详细信息,请参阅 使用目标值配置物理块.
港口
非定向
#
R
—
传感器轴
旋转力学
Details
感器正连接对应的机械转动口。
| 程序使用名称 |
|
#
C
—
传感器外壳
旋转力学
Details
感器的负(参考)连接对应的机械旋转端口。
| 程序使用名称 |
|
#
yp
—
正轴端子
电力
Details
轴的正极端子连接的电端口 .
依赖关系
要使用此端口,请设置参数 Output interface 价值 Electrical connections.
| 程序使用名称 |
|
#
鹿yn
—
轴的负端子
电力
Details
电端口连接到轴的负端子 .
依赖关系
要使用此端口,请设置参数 Output interface 价值 Electrical connections.
| 程序使用名称 |
|
#
xp碌鲁
—
正轴端子
电力
Details
轴的正极端子连接的电端口 .
依赖关系
要使用此端口,请设置参数 Output interface 价值 Electrical connections.
| 程序使用名称 |
|
#
xn
—
轴的负端子
电力
Details
电端口连接到轴的负端子 .
依赖关系
要使用此端口,请设置参数 Output interface 价值 Electrical connections.
| 程序使用名称 |
|
输出
#
角度
—
旋转角度,rad
标量,标量
Details
平面内磁场的旋转角度 - ,作为标量返回。
依赖关系
要使用此端口,请设置参数 Output interface 价值 Decoded angular position
| 数据类型 |
|
| 复数支持 |
非也。 |
参数
参数
# Number of pole pairs — 对极数
Details
极对的数量。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
X-axis voltage amplitude —
沿轴的张力
V | uV | mV | kV | MV
Details
沿轴的电压幅度 .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Y-axis voltage amplitude —
沿轴的张力
V | uV | mV | kV | MV
Details
沿轴的电压幅度 .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
X-axis voltage offset —
沿轴的电压偏移
V | uV | mV | kV | MV
Details
在没有外部磁场的情况下,电流沿轴流过导体时的电位差 .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Y-axis voltage offset —
沿轴的电压偏移
V | uV | mV | kV | MV
Details
在没有外部磁场的情况下,电流沿轴流过导体时的电位差 .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Quadrature error —
正交误差
rad | deg | rev | mrad | arcsec | arcmin | gon
Details
正交误差的量值。 正交切换可以减少偏置误差。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Tumbling coefficient — 不稳定系数
Details
的不稳定系数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Output interface —
解码信息的接口
Electrical connections | Decoded angular position
Details
解码信息的接口,可用值:
-
Electrical connections. -
Decoded angular position.
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |