Arduino支持包
|
在开始之前,从文章中做一般的准备和设置 在目标硬件上运行模型. 它描述了在目标硬件上运行模型的一般步骤:环境准备、连接、生成/装配和基本启动验证。 |
要在此模式下与Arduino兼容的板一起工作,使用该块 EDM-目标-Arduino,其设置与设备的交互。
在开始工作之前,您必须安装 arduino-cli是Arduino硬件编译和固件的工具链。 安装后,将完整路径复制到可执行文件 arduino-cli[。exe] 并在*EDM-Target-Arduino*块的相应参数中指定它。
|
要在参数的*EDM-Target-Arduino*块中自动搜索arduino-cli *ArduinoCLI 路径:*指定值 在系统环境变量的目录中 如果未自动找到arduino-cli,请手动指定完整路径,例如: *窗户: |
| 要使用Arduino兼容克隆,您可能需要安装额外的驱动程序。 例如,用于Windows的Arduino Mega2560克隆板需要CH340驱动程序。 |
准备工作
确保已安装和配置硬件支持包。 它的安装在一节中详细描述 硬件连接。
检查arduino-cli安装
安装arduino-cli后,建议在开始使用Arduino支持包之前检查其性能。
第1步。 检查arduino-cli版本
打开终端(命令提示符)并运行:
arduino-cli version*预期结果:*应该显示arduino-cli版本,例如:
arduino-cli Version: 0.35.3 Commit: 7a72ce6 Date: 2023-11-15T12:30:00Z
如果未找到命令:
*Windows:确保将arduino-cli添加到环境变量中 路径(推荐)或指定完整路径:
+
"C:\Program Files\arduino-cli\arduino-cli.exe" version*Linux:通过包管理器检查安装或手动安装。
第二步。 初始化配置
创建arduino-cli配置文件:
arduino-cli config init*预期结果:*将创建一个配置文件:
*窗户: %USERPROFILE%\。arduino15\arduino-cli。亚姆尔
*Linux: ~/.arduino15/arduino-cli。亚姆尔
第四步。 为您的电路板安装平台
确定你的董事会的FQBN(完全合格的董事会名称):
arduino-cli board listall在列表中找到您的电路板并安装相应的平台。:
*对于Arduino Uno/Nano/Mega(AVR):
+
arduino-cli core install arduino:avr*适用于ESP8266:
+
arduino-cli core install esp8266:esp8266 --additional-urls http://arduino.esp8266.com/stable/package_esp8266com_index.json*适用于ESP32:
+
arduino-cli core install esp32:esp32 --additional-urls https://espressif.github.io/arduino-esp32/package_esp32_index.json*适用于STM32:
+
arduino-cli core install STMicroelectronics:stm32 --additional-urls https://github.com/stm32duino/BoardManagerFiles/raw/main/package_stmicroelectronics_index.json*预期结果:*有关平台成功安装的消息。
第五步。 安装驱动程序(如有必要)
窗户
一些克隆板(如Arduino Mega2560)可能需要CH340驱动程序。:
-
从制造商的官方网站下载驱动程序。
-
安装驱动程序。
-
重新连接板。
-
检查新的COM端口是否出现在设备管理器中。
WINDOWS上的STM32ST-LINK/V2需要安装 司机。
Linux
通常,串行控制器驱动程序内置在内核中。 如果费用没有确定:
lsusb检查列表中您的卡的可用性。 必要时添加udev规则。:
#Arduino的一个例子
echo 'SUBSYSTEM=="tty", ATTRS{idVendor}=="2341", MODE="0666"' | sudo tee /etc/udev/rules.d/50-arduino.rules
sudo udevadm control --reload-rules
sudo udevadm trigger要安装程序员驱动程序,请使用包管理器,例如:
sudo apt install stlink-tools第六步。 检查板的连接
通过USB将板连接到计算机并运行:
arduino-cli board list*预期结果:*应显示与端口连接的卡的列表。:
Port Protocol Type Board Name FQBN Core /dev/ttyUSB0 serial Serial Port (USB) Arduino Uno arduino:avr:uno arduino:avr
记住端口地址(例如, /开发/ttyUSB0 对于Linux或 COM3 对于Windows)。
第七步。 创建并编译测试草图
创建测试项目或创建文件 test_blink/test_blink。井野 与内容:
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}*Arduino UNO
+ 执行编译:
+
arduino-cli compile --fqbn "arduino:avr:uno" test_blink+ 完成下载:
+
arduino-cli upload --fqbn "arduino:avr:uno" test_blink*STM32
+ 例如,以STM32F411CEU6"黑丸"调试板为例。
+ 要获取所有可用的电路板部件号(pnum)和有关电路板的其他信息,请使用以下命令:
+
arduino-cli board details -b STMicroelectronics:stm32:GenF4+
在行中指定电路板部件号 fqbn.
执行编译:
+
arduino-cli compile --fqbn "STMicroelectronics:stm32:GenF4:pnum=BLACKPILL_F411CE" test_blink+
完成下载,指定 上传_method 取决于您使用的:
+
arduino-cli upload --fqbn "STMicroelectronics:stm32:GenF4:pnum=BLACKPILL_F411CE,upload_method=OpenOCDSTLink" test_blink*预期结果:*成功编译和下载没有错误。 电路板上的LED正在闪烁。
故障排除问题
| 问题 | 决定 |
|---|---|
|
将arduino-cli添加到 |
|
检查USB电缆并安装驱动程序。 |
|
将用户添加到拨号组: |
|
执行 |
|
检查FQBN的正确性和已安装库的可用性。 |
设置和启动模型
-
打开模型 AnyMath.
-
单击目标平台选择按钮并选择*目标硬件*:
-
添加*EDM-Target-Arduino*块从 块库在画布上 *AnyMath*并组装模型或运行命令
恩吉。包裹。盖德莫斯("Engee-Device-Manager")并打开演示模型example_arduino-monitor-and-tune.工程师.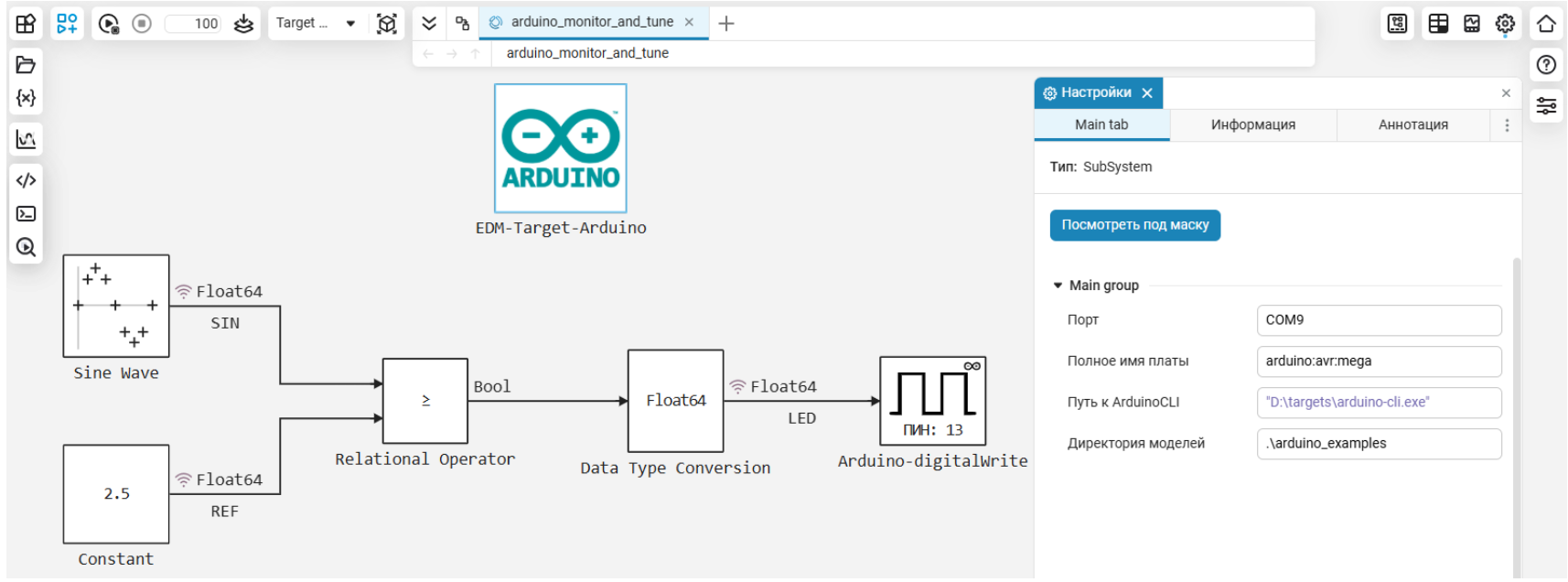
-
选择并运行模型的执行模式之一:
-
在硬件上运行模型
 -在目标平台上的互动执行,并由 AnyMath.
-在目标平台上的互动执行,并由 AnyMath. -
以独立模式运行
 -在目标平台上离线执行,没有来自 AnyMath.
-在目标平台上离线执行,没有来自 AnyMath.
-
执行模式
有关目标硬件的操作模式的详细信息,请参阅文章 在目标硬件上运行模型。
|
当以可配置参数交互方式运行模型时,必须在选项卡上的模型设置面板中"代码生成"为参数设置 *默认参数行为*价值 |
|
在交互模式下运行模型时,必须有 记录至少一个模型信号。 |