距离角度响应
获取范围角轴上的响应图。
模块类型: RangeAngleResponse
|
库中的路径: |

港口
入口处
*X*是输入信号pass的数据立方体:q[<br>] 复数k乘N矩阵 | K乘N乘L的复数数组
输入数据指定为复数k乘N矩阵或复数K乘N乘l阵列。 输入数据的内容取决于各种参数设定的角度测量方法。
*K是范围样本或FFT滤波器的数量。 *N是独立空间通道的数量:传感器或轴承。 *L是与输入信号中探测周期或扫描次数相对应的慢时间维度。
可以改变用于输入矩阵的第一维的样本的数量以模拟信号持续时间的变化。 例如在具有可变脉冲重复率的脉冲波形的情况下可以发生大小的变化。
PRF-脉冲重复率通过:q[<br>] 正标量
脉冲重复率。
依赖关系
要启用此输入参数,请将*范围处理方法*参数设置为 FFT的 不要选中这个框。 Dechirp输入信号.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
*Xref*是用于随时间推移进行一致滤波的参考信号:q[<br>] 复数列向量K乘1
用于一致滤波的参考信号被设为复数列向量K乘1。 行数应等于端口*X*上的快速时间样本数(在一个探测周期内)。
依赖关系
要启用此输入参数,请将*范围处理方法*参数设置为 FFT的 并选中该框 Dechirp输入信号.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
支持复数:是
*—匹配通滤波器的系数:q[<br>] 复数列向量P乘1
匹配滤波器的系数,指定为复数列向量P乘1。 P必须小于或等于端口*X*上的快速时间样本数K。
依赖关系
要启用此输入参数,请将*范围处理方法*参数设置为 匹配滤波器.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
支持复数:是
El-通过的仰角:q[<br>] 标量,标量
来自某个轴承的响应的仰角被设置为从 −90°至90°。 计算此仰角的角度范围响应。 测量单位是度。
依赖关系
要启用此参数,请将*仰角源*参数设置为 输入端口.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
出口;出口
Resp-通过范围响应数据立方体:q[<br>] 复列向量为M乘1 | L上的复数矩阵M | M乘N乘L的复数数组
在其中一个视图中返回的范围响应数据:
*复数列向量M乘1。 *L上的复数矩阵M。 *M乘N乘L的复数数组。
M的值取决于处理的类型。
| 范围处理方法参数的值 | M的值 |
|---|---|
|
如果范围处理*参数中FFT长度的*源设置为 |
|
M=K端口*X*上单个感测周期内的范围采样数。 |
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
支持复数:是
范围-通过范围的值:q[<br>] 实向量是一列M乘1
作为实数向量列返回的范围值M乘1。 该向量定义了对应于输出立方体*RESP*的快速时间(在单个感测周期内)的测量的范围。 M是立方体*RESP*中的快速时间或范围样本的数量。 范围的值单调递增且均匀分布。 测量单位为米。
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
Ang-沿通道角度方向的角度值:q[<br>] 实向量是p乘1的列
感兴趣的轴承对应的角度值作为实向量列P返回1。 测量单位是度。
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
参数
主要
信号传播速度-信号传播速度,m/s通过:q[<br>] 3e8(默认) | 正标量
实正标量形式的信号的传播速度。 默认值是光速。: 3e8米/秒.
测量单位为米每秒。
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
工作频率(Hz)—通系统的载波频率:q[<br>] 3e8(默认) | 正标量
系统的载波频率,设置为正标量。 测量单位为赫兹。
范围处理方法-通过范围处理方法:q[<br>] 匹配过滤器(默认情况下) | FFT的
范围处理方法规定为 匹配滤波器 或 FFT的.
-
匹配滤波器-该装置对输入信号应用匹配滤波器。 这种方法通常用于脉冲信号,当匹配滤波器是发射信号的临时反馈特性时。 -
FFT的-单元将FFT应用于输入信号。 这种方法通常用于FMCW和线性FM脉冲信号。
继承采样率-通过采样率的继承:q[<br>] 启用(默认情况下) | 已关闭
选中该框以从更高级别的块继承采样率。 否则,请使用*Sample rate(Hz)*参数设置采样率。
采样率(Hz)-通过采样率:q[<br>] 1e6(默认) | 正标量
正标量形式的信号的采样频率。 测量单位为赫兹。
依赖关系
要使用此选项,请取消选中*继承采样率*复选框。
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
FM扫描斜率(Hz/s)-线性扫描斜率通过:q[<br>] 1e9(默认) | 标量,标量
线性FM扫描的斜率被设置为标量。 输入端口*X*的快速时间维度应与具有此斜率的扫描相对应。
例子: 1.5e9
依赖关系
若要使用此参数,请将*范围处理方法*参数设置为 FFT的.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
Dechirp输入信号-使能输入信号的时间滤波
启用(默认情况下) | 已关闭
选择此选项以使块对输入信号执行基于时间的滤波操作。 取消选中此框表示输入信号已被过滤,不需要任何操作。
依赖关系
要使用此参数,请将*范围处理方法*参数设置为 FFT的.
范围内FFT长度的来源-FFT通过大小:q[<br>] 自动(默认) | 物业
范围内用于处理解密信号的FFT的大小给出为 汽车 或 物业.
-
汽车-FFT的长度等于输入数据立方体的采样范围。 -
物业-使用范围处理*参数中的*FFT长度指定FFT的长度。
依赖关系
若要使用此参数,请将*范围处理方法*参数设置为 FFT的.
*范围处理中的FFT长度*是用于处理通过范围的FFT的长度:q[<br>] 1024(默认) | 一个正整数
用于处理范围的FFT的长度被设置为正整数。
依赖关系
若要使用此参数,请将*范围处理方法*参数设置为 FFT的 并且对于范围处理中的FFT长度的参数*源*值 物业.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
范围处理窗口-FFT通过后减少旁瓣的权重窗口类型:q[<br>] 无 | 汉明 | 切比雪夫 | 汉恩 | 凯撒 | 泰勒
使用以下值之一指定用于处理范围的窗口: 无, 汉明, 切比雪夫, 汉恩, 凯撒, 泰勒.
如果将此参数设置为 泰勒,生成的泰勒窗将具有与主瓣相邻的四个几乎永久的旁瓣。
依赖关系
若要使用此参数,请将*范围处理方法*参数设置为 FFT的.
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64</无翻译>
范围旁瓣衰减水平-通道旁瓣的衰减水平:q[<br>] 30(默认) | 标量,标量
正标量形式的旁瓣的衰减水平。
此衰减仅适用于windows。 切比雪夫, 凯撒 或 泰勒. 测量单位为dB。
依赖关系
要使用此参数,请将*范围处理方法*参数设置为 FFT的,而对于*范围处理窗口*参数,值 切比雪夫, 凯撒 或 泰勒.
在中心设置参考范围-通过范围传递设置离散网格的参考偏移量:q[<br>] 启用(默认情况下) | 已关闭
选择此选项可按范围设置离散网格的参考偏移。 否则,参考范围将对应于离散网格的开始。
依赖关系
若要使用此参数,请将*范围处理方法*参数设置为 FFT的.
<无转换>*数据类型*: 布尔</无翻译>
*参考范围(m)*为离散网格在通过范围内的初始坐标:q[<br>] 0(默认) | 非负标量
离散范围网格的初始坐标,指定为非负标量。
*如果*范围处理方法*参数设置为 匹配滤波器,将初始坐标设置为范围网格的开始。
*如果*范围处理方法*参数设置为 FFT的,初始坐标由参数*Set reference range at center*确定。
**选中复选框时 在中心设置参考范围 初始坐标设置为范围网格的中心。
**否则,初始坐标设置为范围网格的开始。
测量单位为米。
例子: 1000.0
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
仰角来源-仰角来源通行证:q[<br>] 属性(默认情况下) | 输入端口
仰角的来源,指定为 物业 或 输入端口.
-
物业-仰角由*仰角(deg)参数设置* -
输入端口-仰角通过输入端口提供。
*仰角(deg)*是用于计算坐标轴范围-角度传递中的地图的仰角:q[<br>] 0(默认) | 标量,标量
用于计算范围角响应的仰角作为标量给出。 角度应在 −90至90度。 将*仰角源*参数设置为 物业. 默认情况下,此属性的值为 0.
角度跨度(deg)-通过的角度范围:q[<br>] [-90,90](默认) | 实向量为1乘2
角扇区的大小,设为1乘2的实向量。 对象计算一系列角度上的角响应, [min_angle,max_angle].
例子: [-45, 45]
角度箱的数量-通过的角度扇区中的轴承的数量:q[<br>] 大于2的正整数
用于计算角度的角扇区中的轴承的数量被设置为大于二的正整数。
例子: [256]
<无转换>*数据类型*: 漂浮物16, 漂浮物32, 漂浮64, Int8, Int16, Int32, Int64, UInt8, UInt16, UInt32, UInt64, 布尔</无翻译>
元素
元素类型-天线阵列传递的元素类型:q[<br>] 各向同性天线(默认) | 心形天线 | 余弦天线 | 定制天线 | 高斯天线 | Sinc天线 | 全向麦克风 | 自定义麦克风
天线阵元的类型。
可用值:
-
各向同性天线 -
心形天线 -
余弦天线 -
定制天线 -
高斯天线 -
Sinc天线 -
全向麦克风 -
自定义麦克风
工作频率范围(Hz)—天线阵元的工作频率范围通:q[<br>] [0,1e20](默认) | 一个真正的向量是一个1乘2行
以[LowerBound,UpperBound]形式的矢量行1乘2形式的天线阵元的工作频率范围。 元件在该频率范围之外没有响应。 频率测量单位为Hz。
依赖关系
要使用此参数,请将*元素类型*参数设置为 各向同性天线, 余弦天线 或 全向麦克风.
挡板元件的背面-占辐射通过辐射图案的后束进入元件的后半球 各向同性天线元件 或 全向麦克风 通行证:q[<br>] 禁用(默认情况下) | 已启用
设置此标志以排除对后半球的辐射。 来自后半球在距宽侧±90°范围之外的所有方位角处的响应被设置为零。 广角方向定义为方位角为0°,仰角为0°。
依赖关系
要使用此参数,请将*元素类型*参数设置为 各向同性天线 或 全向麦克风.
零轴方向-轴沿零辐射的方向。 通行证:q[<br>] -x(默认) | +x | +y | -y | +z | -z
轴的方向是沿着零辐射。
依赖关系
要使用此参数,请将*元素类型*参数设置为 心形天线.
余弦模式的指数-定义余弦辐射模式的形状时的指数通过:q[<br>] [1.5,1.5](默认) | 非负标量 | 1乘2的非负值的实矩阵
非负标量或非负值的1乘2实数矩阵形式的余弦模型的指数的指数。 如果余弦模式*的*指数是1乘2矢量,那么第一个元素是方位角方向的指数,第二个元素是地点角度方向的指数。 使用此参数的标量值,方位角和高程方向的余弦将提高到一个幂。
依赖关系
要使用此参数,请将*元素类型*参数设置为 余弦天线.
工作频率矢量(Hz)-天线阵元的工作频率的阵列通过:q[<br>] [0,1e20](默认) | 一个真正的向量是一个字符串
行向量1形式的天线阵元的工作频率的阵列。 增加实际值。 元素没有超出由该向量的最小和最大元素指定的频率范围的响应。 频率测量单位为Hz。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线 或 自定义麦克风. 要在这些频率上设置响应,请使用*频率响应(dB)*参数。
频率响应(dB)—天线阵元的频率响应通过:q[<br>] [0,0](默认)| 一个真正的向量是一个字符串
天线阵列的用户元件的频率响应由参数*工作频率矢量(Hz)*确定。 *频率响应(dB)*矢量的尺寸必须与*工作频率矢量(Hz)*参数指定的矢量的尺寸相匹配。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线 或 自定义麦克风.
输入方向图坐标系—用户天线通的辐射方向图坐标系的选择:q[<br>] az-el(默认) | phi-theta
户天线的辐射方向图的坐标系的选择来指示 阿兹-埃尔 或 phi-theta. 选择时 阿兹-埃尔 *方位角(deg)*和*仰角(deg)*参数用于设置方向图案点的坐标。 指定参数时 phi-theta *Phi角(deg)*和*Theta角(deg)*参数用于设置零件点的坐标。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线.
方位角(deg)-天线的辐射方向图的方位角通过:q[<br>] [-180:180](默认) | 一个真正的向量是一个字符串
方位角的值,这些值将用于计算天线方向图中的矢量行1上 . 它必须超过2。 方位角应在 −包括180°至180°,并按严格的升序排列。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线,并且对于参数*输入图案坐标系* — 阿兹-埃尔.
仰角(deg)-天线辐射方向图通过位置的角度值:q[<br>] [-90:90](默认) | 一个真正的向量是一个字符串
有必要以矢量1的形式计算辐射图的位置角度的值 . 它必须超过2。 角度的测量单位是度。 仰角应在 −包括90°至90°,并按严格的升序排列。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线,并且对于参数*输入图案坐标系* — 阿兹-埃尔.
Phi角度(deg)-通天线的Phi辐射方向图的角度的值:q[<br>] [0:360](默认) | 实向量是P上的第1行
设置天线辐射方向图的两个点的角坐标。 它们被定义为一个真正的向量-行1上 . 它必须超过2。 角度的测量单位是度。 角度值 披 它们必须位于从0°到360°的范围内,并按严格的升序排列。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线,并且对于参数*输入图案坐标系* — phi-theta.
Theta角(deg)-通天线的Theta辐射方向图的角度的值:q[<br>] [0:180](默认) | 实向量是q上的第1行
置天线辐射方向图的Θ点的角坐标。 它们被定义为一个真正的向量-行1上 . 它必须超过2。 角度的测量单位是度。 角度值 西塔 它们应该在0°到180°的范围内,并严格按升序排列。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线,并且对于参数*输入图案坐标系* — phi-theta.
幅度方向图(dB)-天线辐射方向图的幅度通过:q[<br>] 零(181,361)(默认) | P上的实矩阵Q | Q by P by L的实数阵
天线方向图的值,设为矩阵 上 或数组 上 上 .
*如果*输入图案坐标系*参数设置为 阿兹-埃尔 然后 等于由*仰角(deg)*参数定义的矢量的长度,依次, -由*方位角(deg)*参数定义的矢量的长度。
*如果*输入图案坐标系*参数设置为 phi-theta 然后 等于参数*Theta Angles(deg)*定义的向量的长度,依次, -由*Phi Angles(deg)*参数定义的矢量长度。
价值 等于*工作频率矢量(Hz)*参数的值。
*如果此参数的值是矩阵 上 ,则对参数*工作频率矢量(Hz)*中指定的所有频率应用相同的方案。
*如果值是数组 上 上 ,每个元素 上 阵列为参数*工作频率向量(Hz)*中指定的相应频率定义模板。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线.
*相位方向图(deg)*是用户天线通的辐射方向图的相位:q[<br>] 零(181,361)(默认) | P上的实矩阵Q | Q by P by L的实数阵
组合天线的相位辐射方向图,定义为矩阵 上 或数组 上 上 .
*如果*输入图案坐标系*参数设置为 阿兹-埃尔 然后 等于由*仰角(deg)*参数定义的矢量的长度,依次, -由*方位角(deg)*参数定义的矢量的长度。
*如果*输入图案坐标系*参数设置为 phi-theta 然后 等于参数*Theta Angles(deg)*定义的向量的长度,依次, -由*Phi Angles(deg)*参数定义的矢量长度。
价值 等于*工作频率矢量(Hz)*参数的值。
*如果此参数的值是矩阵 上 ,则对参数*工作频率矢量(Hz)*中指定的所有频率应用相同的方案。
*如果值是数组 上 上 ,每个元素 上 阵列为参数*工作频率向量(Hz)*中指定的相应频率定义模板。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线.
将元素法线与阵列法线对齐-将天线阵列元素的法线相对于网格法线对齐
启用(默认情况下) | 已关闭
如果参数值为 已启用 然后天线元件的辐射方向图被旋转以与阵列的法线对齐。 如果 已关闭,则该元素的绘图不旋转。
如果天线用于天线阵列并且参数*输入方向图坐标系*设置为 阿兹-埃尔 如果选择此标志,则辐射图案旋转,使元素坐标系的x轴沿着阵列的法线指向。 如果没有选择,则在没有旋转的情况下使用元素模板。
如果天线用于天线阵列并且参数*输入方向图坐标系*设置为 phi-theta 如果选择此标志,则辐射图案旋转,使元素坐标系的z轴沿着阵列的法线指向。
将此参数与URA和UCA数组的*Array Normal*参数一起使用。
依赖关系
要使用此参数,请将*元素类型*参数设置为 定制天线.
辐射方向图波束宽度(deg)-天线方向图通过的波束宽度:q[<br>] [10,10](默认) | 真正的标量 | 一个真正的向量是一个1乘2行
度的天线方向图的波束宽度。
依赖关系
要使用此参数,请将*元素类型*参数设置为 高斯天线.
极坐标模式频率(Hz)-传声器极坐标辐射模式的频率值:q[<br>] 1e3(默认) | 真正的标量 | 实向量是L上的第1行
极性辐射模式的频率值被设置为一个真正的标量或一个真正的矢量-行1上 . 频率在参数*工作频率矢量(Hz)*指定的频率范围内。
依赖关系
要使用此参数,请将*元素类型*参数设置为 自定义麦克风.
极坐标模式角度(deg)-麦克风通道的极坐标辐射模式的角度值:q[<br>] [-180:180](默认) | 实向量是P上的第1行
麦克风的极辐射方向图的角度值被设置为矢量 . 角度是从麦克风的中心轴测量的,应该在 −包括180°至180°。
依赖关系
要使用此参数,请将*元素类型*参数设置为 自定义麦克风.
极性图案(dB)—麦克风通道的极性辐射图案:q[<br>] 零(1,361)(默认) | 实向量是L上的第1行
以实向量的形式设置用户麦克风元件的极辐射图案的值-行1上 ,在哪里 -参数*极坐标模式频率(Hz)*中指定的频率数。 字符串表示在*极谱频率(Hz)*中指定的相应频率下测量的极谱辐射图的值。 辐射方向图是在方位角平面上测量的。 在方位角平面中,仰角为0°,中心轴方位角为0°,仰角为0°。 极辐射图案围绕中心轴对称。 基于极坐标图,能够在三维空间中构造麦克风定向图案。
依赖关系
要使用此参数,请将*元素类型*参数设置为 自定义麦克风.
阵列
几何-通过网格的几何:q[<br>] ULA(默认) | 市建局 | UCA | 共形阵列
天线配置,指定为:
-
乌拉-均匀线性 -
市建局-均匀矩形 -
UCA-均匀圆形 -
共形阵列-元素的任意排列
元素数-通天线阵列中的元素数:q[<br>] 2个用于ULA阵列,5个用于UCA阵列(默认)
网格类型的元素数 乌拉 或 UCA,设为大于等于2的整数。
当设置参数*指定传感器阵列为*作为 复制子阵列 此参数应用于每个子阵列。
依赖关系
要使用此参数,请将**Geometry*参数设置为 乌拉 或 UCA.
元素间距(m)—通过网格的元素之间的距离:q[<br>] 0.5用于ULA阵列,[0.5,0.5]用于URA阵列(默认) | ula和URA的正标量 | URA阵列正值的2乘1向量
相邻阵元之间的距离:
-
乌拉-将两个相邻数组元素之间的距离指定为正标量。 -
市建局-距离设置为正标量或正值1乘2的向量。 如果*元素间距(m)*是标量,则行和列之间的距离相等。 如果*元素间距(m)*是一个向量,则该向量具有以下形式[SpacingBetweenArrayRows,SpacingBetweenArrayColumns].
依赖关系
要使用此参数,请将*Geometry*参数设置为 乌拉 或 市建局.
阵列轴-直线轴的方向ula
y(默认) | x | z
直线轴的方向 乌拉,设为 y, x 或 z. 数组的所有元素 乌拉 它们沿着该轴均匀分布在阵列的局部坐标系中。
依赖关系
*要使用此参数,请将*Geometry*参数设置为 乌拉.
*如果设备仅支持此选项也会启用 乌拉-数组。
*数组大小—-网格的尺寸 市建局 通行证:q[<br>] [2,2](默认) | 一个正整数 | 具有正整数元素的1乘2向量
数组大小 市建局,指定为正整数或1乘2正整数的向量。
*如果数组的大小是1乘2向量,则该向量具有以下形式 [NumberOfArrayRows,NumberOfArrayColumns].
*如果数组的大小是整数,则该数组具有相同数量的行和列。
*设置参数时*指定传感器阵列为*as 复制子阵列 此参数应用于每个子阵列。
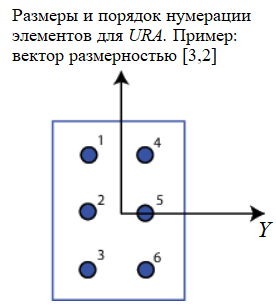
为 市建局 数组元素在数组的最左列中从上到下索引,然后在以下列中从左到右索引。
元素晶格-元素位置的网格 市建局 通行证:q[<br>] 矩形(默认情况下) | 三角形
元素位置网格 市建局,设置为矩形或三角形。
-
矩形-对齐行和列方向上的所有元素。 -
三角形-将矩形网格的偶数行的元素向行轴的正方向移动。 根据行的大小,偏移量是元素之间距离的一半。
依赖关系
要使用此参数,请将*Geometry*参数设置为 市建局.
数组法线-法线到传递网格的方向:q[<br>] X表示URA阵列,z表示UCA阵列(默认)
法线到晶格的方向,给定为 x, y 或 z.
平面晶格的元素位于与阵列法线的选定方向正交的平面内。 元的侧视方向沿法线方向定向。
| 法线到网格的值 | 元的位置和侧视图的方向 |
|---|---|
|
晶格的元素在于 -飞机。 元素法线的所有矢量都沿着X轴定向 |
|
晶格的元素在于 -飞机。 元素法线的所有矢量都沿着X轴定向。 |
|
晶格的元素在于 -飞机。 元素法线的所有矢量都沿着轴定向 . |
依赖关系
要使用此参数,请将*Geometry*参数设置为 市建局 或 UCA.
*Uca的半径(m)*是UCA通过网格的半径:q[<br>] 0.5(默认) | 正标量
阵列的半径 UCA,作为正标量给出。
依赖关系
要使用此参数,请将*Geometry*参数设置为’UCA'。
元素位置(m)—共形晶格通道元素的位置:q[<br>] [0;0;0](默认) | 正值的矩阵是3乘N
共形元素的位置,定义为维度3乘N的实值矩阵,其中N是共形数组中的元素数。 该矩阵的每一列表示数组局部坐标系中的一个位置['x';'y';'z']数组元素。 局部坐标系的原点为(0,0,0)。 测量单位为米。
依赖关系
要使用此参数,请将*Geometry*参数设置为 共形阵列.
元素法线(deg)—共形晶格的元素的法向量的方向:q[<br>] [0;0] | 列向量2乘1 | 2乘N矩阵
共形晶格中元素法向量的方向,定义为2乘1列向量或2乘N矩阵。 N表示数组中的元素数。 如果参数是矩阵,则每列指定窗体中相应元素法线的方向 [方位角;仰角] 相对于局部坐标系。 局部坐标系将正X轴与法线方向对准共形晶格。 如果参数值是2乘1列向量,则对所有数组元素使用相同的指向方向。
*元素位置(m)*和*元素法线(deg)*的参数可用于表示元素对因某些变换而不同的任何排列。 变换可以组合平移、方位角旋转和仰角旋转。 但是,不能使用需要相对于法线方向旋转的变换。
要使用此参数,请将*Geometry*参数设置为 共形阵列.
锥度-改变天线阵列元件的辐射方向图通过:q[<br>] 1(默认) | 复杂的标量 | 复向量
天线阵元的辐射方向图的变化被设置为复数标量或复数向量1由 ,在哪里 -天线阵元的数量。
改变辐射方向图的系数(也称为单元权重)乘以天线阵列单元的响应。 这些系数改变响应的幅度和相位,以减少旁瓣或响应的主轴方向。
如果*Taper*参数的值是标量,则对每个元素应用相同的权重。 如果*锥度*是矢量,那么来自该矢量的权重被应用于天线阵列的相应元件。 尺度的数量必须与天线阵元的数量相对应。
子阵列定义矩阵-属于pass的子阵列的元素的定义:q[<br>] 逻辑矩阵
将子阵列的选择设为矩阵M乘N。M是子阵列的个数,N是阵列中元素的总数。 矩阵的每行表示一个子阵列,行中的每个条目指示元素何时属于子阵列。 如果记录为零,则该元素不属于子数组。 非零条目是应用于相应元素的复值权重。 每行必须至少包含一个非零条目。
每个子阵列的相位中心位于子阵列的几何中心。 子阵列的几何中心取决于*子阵列定义矩阵*和*几何*参数。
依赖关系
要使用此参数,请将*Specify sensor array as*参数设置为*Partitioned array*。
子阵列转向方法-指定控制传递子阵列的方法:q[<br>] 无(默认) | 阶段 | 时间
用于管理子阵列的方法,指定为
-
无 -
阶段 -
时间 -
海关规定
依赖关系
要使用此参数,请将*Specify sensor array as*参数设置为 分区数组 或 复制子阵列.
*移相器频率(Hz)*是通子阵列相移的频率:q[<br>] 3.0e8(默认) | 一个真正的正标量
子阵列的旋转控制移相器的工作频率,设置为正实标量。 测量单位为赫兹。
依赖关系
要使用此参数,请为*Sensor array设置值* 分区数组 或 复制子阵列 并将*子阵列转向方法*设置为 阶段.
移相器中的位数-子阵列通的控制的相移的量化位:q[<br>] 0(默认) | 一个非负整数
子阵列的转向相移的量化位,指定为非负整数。 值为零表示不执行量化。
依赖关系
要使用此参数,请为*Sensor array设置值* 分区数组 或 复制子阵列 并将*子阵列转向方法*设置为 阶段.
子阵列布局—通道位置的规范:q子阵列[<br>] 矩形(默认) | 海关规定
将相同子阵列的位置指定为 矩形 或 海关规定.
当将此参数设置为 矩形 要放置子阵列,请使用*网格大小*和*网格间距*参数。
当将此参数设置为 海关规定 要放置子阵列,请使用*子阵列位置(m)参数*和*子阵列法线*。
依赖关系
要使用此参数,请将*Sensor array*参数设置为 复制子阵列
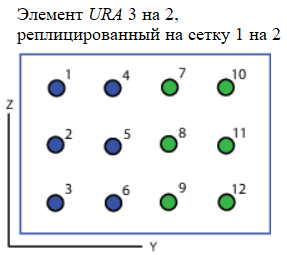
网格大小-通过子阵列的矩形网格的尺寸:q[<br>] [1,2](默认)
矩形子阵列的网格大小设置为单个正整数或正整数的1乘2向量串。
如果*网格大小*是一个整数标量,那么数组在每行和每列中具有相等数量的子阵列。 如果*网格大小*是表单的1乘2向量 [数字,数字],那么第一个条目是每列中的子阵列的数量。 第二个条目是每行中的子阵列数。 线沿局部轴定位 y,且所述柱沿所述局部轴 z. 该图显示了如何再现子阵列。 市建局 大小为3乘2,使用网格大小[1,2]。
依赖关系
要使用此参数,请将*Sensor array*参数设置为 复制子阵列 而对于*Subarrays layout*参数,值 矩形.
网格间距(m)-矩形网格通道上的子阵列之间的距离:q[<br>] 自动(默认) | 一个真正的正标量| 具有实数正数的1乘2向量
矩形网格中的子阵列之间的距离,定义为正实标量,正实值的1乘2向量,或 汽车. 测量单位为米。
*如果*网格间距*是标量,那么行与列之间的距离是相同的。
*如果*网格间距*是1乘2矢量,则该矢量具有以下形式 [SpacingBetweenRows,Spacingbetweenolumn]. 第一个条目指定沿列的行之间的距离。 第二个元素设置行中列之间的距离。
*如果*网格间距*参数设置为 汽车 重复时,在构造完整数组时,为行和列保留子数组元素之间的距离。 此参数仅在设置*Geometry参数时可用。*如何 乌拉 或 市建局.
依赖关系
要使用此参数,请将*Sensor array*参数设置为 复制子阵列,并为*Subarrays布局参数* — 矩形.
子阵列位置(m)-通道子阵列的位置:q[<br>] [0,0;0.5,0.5;0,0] ( 默认情况下) | 实矩阵是3乘N
子阵列在自定义网格中的位置,定义为3乘N实矩阵,其中N是数组中子阵列的数量。 矩阵的每一列表示一个子阵列在阵列的局部坐标系中的位置。 坐标表示为[x; y; z]. 测量单位为米。
依赖关系
要使用此参数,请将*Sensor array*参数设置为 复制子阵列 而对于*Subarrays layout*参数,值 海关规定.
子阵列法线-子阵列法线向量的方向传递:q[<br>] [0,0;0,0](默认)| 实矩阵是2乘N
指定数组中子阵列法线的方向。 该参数的值是一个2乘N矩阵,其中N是数组中的子阵列数。 矩阵的每列以形式定义相应子阵列的法线的方向 [方位角;仰角]. 角度的测量单位是度。 角度相对于本地坐标系进行设置。
*子阵列位置*和*子阵列法线*参数可用于表示子阵列对因某些变换而不同的任何位置。 变换可以组合平移、方位角旋转和仰角旋转。 但是,不能使用需要相对于法线旋转的变换。
依赖关系
要使用此参数,请将*Sensor array*参数设置为 复制子阵列,而对于*Subarrays布局参数* — 海关规定.