Compound Planetary Gear
A planetary gearbox with a stepped planetary gear.
blockType: Engee1DMechanical.Transmission.Gears.Planetary.Compound
|
Path in the library: |

Description
Block Compound Planetary Gear simulates a planetary gear train with composite planetary gears. Each composite planetary gear consists of a pair of rigidly connected and coaxially arranged gears of different radii. One of the two gears engages with the sun gear located in the center, and the other with the outer ring gear.
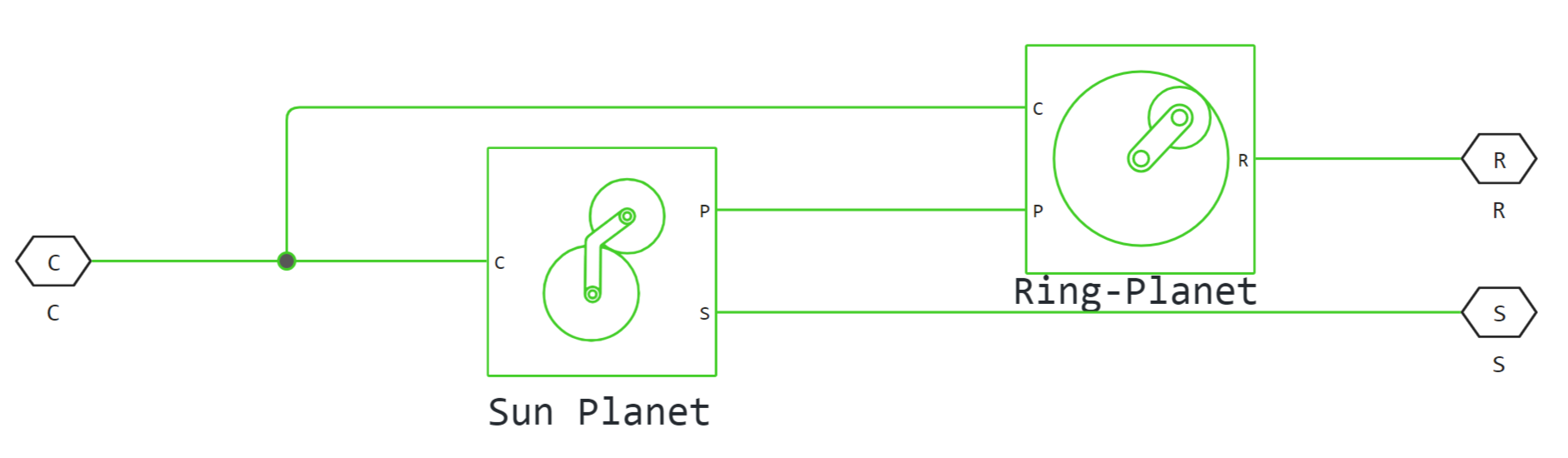
Two-stage planetary gear

This block models a two-stage planetary transmission as a block-based structural component. Sun-Planet and Ring-Planet. The figure shows an equivalent block diagram of a two-stage planetary transmission unit.
To improve the accuracy of the gear model, you can set properties such as gear inertia, engagement losses, and viscous friction losses. By default, inertia and viscous losses of the gear are assumed to be negligible. This unit allows you to set the inertia of the internal planetary gears. To simulate the inertia of the driver, solar and ring gears, connect the unit Inertia to ports C, S, and R.
The thermal model
You can simulate the effects of heat flow and temperature changes by turning on an additional heat port H. To use the H thermal port, set the Friction model parameter to Temperature-dependent efficiency.
The equations
Ideal gears and transmission ratios
Block Compound Planetary Gear It imposes two kinematic and two geometric constraints.:
where
-
— radius of the bearing gear;
-
— angular velocity of the bearing gear;
-
— radius of the solar gear;
-
— angular velocity of the solar gear;
-
— the radius of the planetary gear engaged with the solar gear;
-
— angular velocity of the planetary gear;
-
— the radius of the planetary gear engaged with the ring gear;
-
— the radius of the ring gear.
The gear ratio for engagement of the ring and planetary gears is:
The gear ratio for the engagement of the planetary and solar gears is:
where
-
— gear ratio between ring and planetary gear;
-
— the number of teeth on the ring gear;
-
— the number of teeth of the planetary gear engaged with the ring gear;
-
— the gear ratio between the planetary and solar gears;
-
— the number of teeth of the planetary gear engaged with the solar gear;
-
— the number of teeth on the solar gear.
As for gear ratios, the key kinematic limitation is:
Four degrees of freedom are reduced to two independent pairs of gears: or .
Gear ratio must be >1.
|
The transmission of torque is carried out as follows:
where
-
— the torque transmission coefficient for a planetary gear engaged with an annular gear;
-
— the torque transmission coefficient for the ring gear;
-
— losses during transmission of torque;
-
— the torque transmission coefficient for the solar gear;
-
— the torque transmission coefficient for a planetary gear engaged with a solar gear.
Ideally, when there is no loss in torque transmission, .
Imperfect gears and gear losses
In an imperfect case (for more information, see the article Modeling of mechanical gears with losses).
Assumptions and limitations
-
The inertia of the gears is negligible.
-
Gears are treated as solids.
-
Coulomb friction slows down the simulation. For more information, see here.
Ports
Conserving
#
C
—
planetary gear drive
`rotational mechanics
Details
A non-directional port associated with the driver of a planetary gear of a gearbox.
| Program usage name |
|
#
R
—
ring gear
`rotational mechanics
Details
A non-directional port associated with the ring gear of a gearbox.
| Program usage name |
|
#
S
—
sun gear
`rotational mechanics
Details
A non-directional port associated with the sun gear of a gearbox.
| Program usage name |
|
#
H
—
heat flux
`heat
Details
A non-directional port associated with heat flow.
The heat port allows modelling the heat flow between the unit and the connected network.
Dependencies
To use this port, set Friction model to `Temperature-dependent efficiency'.
| Program usage name |
|
Parameters
Main
# Ring (R) to planet (P) teeth ratio (NR/NP) — gear ratio from ring gear to planetary gear
Details
Constant ratio, , of ring gear revolutions to planetary gear revolutions. Determined by the number of teeth of the ring gear divided by the number of teeth of the planetary gear. The gear ratio must be strictly >1.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Planet (P) to sun (S) teeth ratio (NP/NS) — gear ratio from the planetary gear to the sun gear
Details
Constant ratio, , of planetary gear revolutions to solar gear revolutions. Determined by the number of teeth of the planetary gear divided by the number of teeth of the sun gear. The gear ratio must be strictly `>0'.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Meshing Losses
#
Friction model —
friction model
No meshing losses - Suitable for HIL simulation | Constant efficiency | Temperature-dependent efficiency
Details
A model of friction in a transmission. Defined as:
-
No meshing losses - Suitable for HIL simulation- the gearing is assumed to be perfect. -
Constant efficiency- torque transmission between gear pairs is reduced by a constant efficiency value, , so that . -
Temperature-dependent efficiency- the torque transmission between gear pairs is determined by an interpolation table of temperature and efficiency correspondence.
| Values |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
# Sun-planet and ring-planet ordinary efficiency — vector of torque transmission efficiency values
Details
The vector of efficiency values, [ ], for the following meshes: sun gear - planetary gear and ring gear - planetary gear respectively. The element of the vector must be in the interval (0,1].
Dependencies
To use this parameter, set the Friction model parameter to Constant efficiency.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Temperature —
vector of temperature values
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
A vector of temperature values used to construct an interpolation table of temperature and efficiency correspondence. The elements of the vector should be monotonically increasing.
Dependencies
To use this parameter, set the Friction model parameter to `Temperature-dependent efficiency'.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Sun-planet efficiency — vector of torque transmission efficiency values from solar to planetary gears
Details
A vector of output to input power ratios describing the power flow from the sun gear to the satellite gear, . The unit uses these values to build an interpolation table of temperature and efficiency correspondence.
Each element is an efficiency value related to the corresponding temperature value in the vector of Temperature parameter values. The length of the vector must be equal to the length of the Temperature parameter vector. Each element of the vector must be in the range (0,1].
Dependencies
To use this parameter, set the Friction model parameter to `Temperature-dependent efficiency'.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Ring-planet efficiency — vector of torque transmission efficiency values from ring gear to planetary gear
Details
Vector of torque transmission efficiency values, , for ring gear and planetary gear.
The unit uses these values to build an interpolation table of temperature and efficiency correspondence.
Each element is an efficiency value related to the corresponding temperature value in the vector of Temperature parameter values. The length of the vector must be equal to the length of the Temperature parameter vector. Each element of the vector must be in the range (0,1].
Dependencies
To use this parameter, set the Friction model parameter to `Temperature-dependent efficiency'.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Sun-carrier and planet-carrier power thresholds —
minimum threshold power values
W | uW | mW | kW | MW | GW | V*A | HP_DIN
Details
Vector of power threshold values above which the full torque transmission efficiencies apply. Enter the threshold values in the order sun gear-drive, planetary gear-drive. For values below these values, the efficiency is smoothed using a hyperbolic tangent function.
-
If Friction model is set to `Constant efficiency', the unit reduces losses to zero when no power is transmitted.
-
If Friction model is set to `Temperature-dependent efficiency', the unit smooths the efficiency values between zero at rest and the values specified in the temperature and efficiency interpolation tables.
Dependencies
To use this parameter, set Friction model to Constant efficiency or Temperature-dependent efficiency.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Viscous Losses
#
Sun-carrier and planet-carrier viscous friction coefficients —
viscous friction coefficients between gears
N*m*s/rad | mN*m*s/rad | kN*m*s/rad | kgf*m*s/rad | lbf*ft*s/rad
Details
The vector of viscous friction coefficients, [ ], for the motion of the sun gear and planetary gear, respectively.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Inertia
# Inertia — inertia model
Details
Select this check box to enable the inertia model for the gear.
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Planet gear inertia —
planetary gear inertia
kg*m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
Moment of inertia of the combined planetary gears as a positive scalar.
Dependencies
To use this parameter, select the checkbox for the Inertia parameter.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Thermal Port
#
Thermal mass —
heat capacity
J/K | kJ/K
Details
The heat energy required to change the temperature of a component by one degree. The greater the heat capacity, the more resistant the component is to temperature change.
Dependencies
To use this parameter, set the Friction model parameter to `Temperature-dependent efficiency'.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Initial temperature —
initial temperature
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
The temperature of the block at the beginning of the simulation. The initial temperature sets the initial efficiency value of the components according to the vectors specified for them.
Dependencies
To use this parameter, set the Friction model parameter to `Temperature-dependent efficiency'.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |