Absolute Rotational Motion Sensor
Motion sensor in mechanical rotary systems.
blockType: AcausalFoundation.Mechanical.Rotational.Sensors.Motion
|
Absolute Rotational Motion Sensor Path in the library: |
|
Relative Rotational Motion Sensor Path in the library: |


Description
The Rotational Motion Sensor unit is a mechanical rotational motion sensor, i.e. a device which, when included between two mechanical rotational units, generates a signal proportional to acceleration, angular velocity or position (angle). The initial angular position (offset) can be set as a parameter of the unit.
The R and C connections are mechanical rotary ports that connect the block to the nodes between which motion is measured. The positive direction of the block is from port R to port C. This means that velocity is measured as , where are the absolute angular velocities at ports R and C respectively. The Measurement type parameters allow to disable the C port and make measurements relative to ground.
Connections α, W and A are the output ports for angular acceleration, velocity and displacement respectively. The visibility of these ports is controlled by the parameters of the block. If you enable the α port, the block performs additional calculations to measure acceleration based on velocity. To avoid complicating the model, it is recommended to enable only those ports that are actually used for measurement.
The Wrap angle to [0, 2*pi] parameters allows you to control the output range of angular displacement. When this parameters is enabled, the angular displacement is stored between 0 and radians (360 degrees), regardless of the number of revolutions performed by the object and the direction of rotation. When the parameters are off, the output range is unlimited.
The figure shows the difference between the two options.
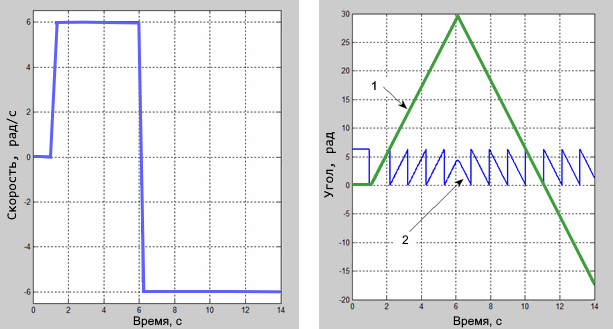
In this example, the object moves at a speed of 6 rad/s in the positive direction for the first 5 seconds and then switches to the negative direction at the same speed. By default, the angular offset output (line 1) shows that the object has turned forward 30 rad and then turned back in the negative direction, continuing to −20 rad. If you select the Wrap angle to [0, 2*pi] checkbox, the output (line 2) remains between 0 and rad.
Checking Wrap angle to [0, 2*pi] simplifies the development of models with complex relationships between model parameters and angle of rotation, such as pumps and motors.
Ports
Output
α - angular acceleration, rad/s²
scalar
Angular acceleration output port.
Dependencies
To use this port, set the Acceleration parameters to On.
W - angular velocity, rad/sec
scalar
Angular velocity output port.
Dependencies
To use this port, set the Velocity parameters to On.
A - position (angular displacement), rad
scalar
Angular displacement (angle of rotation) output port.
Dependencies
To use this port, set the Position parameters to On.
Non-directional
R - shaft (positive connection)
`rotational mechanics
Mechanical rotary port corresponding to the positive connection of the encoder.
C - housing (negative connection)
`rotational mechanics
Mechanical rotary port corresponding to the negative connection of the sensor.
Dependencies
To use this port, set the Measurement type parameters to `Relative'.
Parameters
Measurement type - choice between absolute and relative measurements
Absolute (by default) | Relative
Select between absolute and relative measurements:
-
Relative- measuring acceleration, velocity and position of port R relative to port C. -
Absolute- disable the C port and measure the acceleration, velocity and position of the R port relative to the ground (internal reference node).
Acceleration - switch on the output port for angular acceleration measurement
Disabled (by default) | On
Checking this box enables the α output port to measure angular acceleration. Opening the α port also requires additional calculations to measure velocity-based acceleration, so this port is disabled by default.
Velocity - Enable the output port for angular velocity measurement
On (By default) | Disabled.
When checked, the W output port is enabled to measure angular velocity.
Position - Enables the output port for angular displacement measurement
Enabled (By default)| Disabled
When this checkbox is selected, the A output port is enabled, which allows to measure the position (angular displacement).
Wrap angle to [0, 2*pi] - limit the output range for angular displacement
Off (By default) | On
When set to On, the angular displacement output from the encoder remains in the range of 0 to radians (360 degrees), regardless of the number of revolutions performed by the object and the direction of rotation. When set to the Off position, the output range is not limited.
Checking this box simplifies the development of models with complex relationships between model parameters and angle of rotation, such as pumps and motors.
Dependencies
This parameter is used when the Position parameters are set to On.
Initial angle, rad - initial sensor offset
0 rad (By default).
Initial angular position of the sensor (offset).
Dependencies
This parameter is used when the Position parameters are set to On.