Inference
How inference works
In Julia compiler, "type inference" refers to the process of deducing the types of later values from the types of input values. Julia’s approach to inference has been described in the blog posts below:
Debugging compiler.jl
You can start a Julia session, edit compiler/*.jl (for example to insert print statements), and then replace Core.Compiler in your running session by navigating to base and executing include("compiler/compiler.jl"). This trick typically leads to much faster development than if you rebuild Julia for each change.
Alternatively, you can use the Revise.jl package to track the compiler changes by using the command Revise.track(Core.Compiler) at the beginning of your Julia session. As explained in the Revise documentation, the modifications to the compiler will be reflected when the modified files are saved.
A convenient entry point into inference is typeinf_code. Here’s a demo running inference on convert(Int, UInt(1)):
# Get the method
atypes = Tuple{Type{Int}, UInt} # argument types
mths = methods(convert, atypes) # worth checking that there is only one
m = first(mths)
# Create variables needed to call `typeinf_code`
interp = Core.Compiler.NativeInterpreter()
sparams = Core.svec() # this particular method doesn't have type-parameters
run_optimizer = true # run all inference optimizations
types = Tuple{typeof(convert), atypes.parameters...} # Tuple{typeof(convert), Type{Int}, UInt}
Core.Compiler.typeinf_code(interp, m, types, sparams, run_optimizer)If your debugging adventures require a MethodInstance, you can look it up by calling Core.Compiler.specialize_method using many of the variables above. A CodeInfo object may be obtained with
# Returns the CodeInfo object for `convert(Int, ::UInt)`:
ci = (@code_typed convert(Int, UInt(1)))[1]The inlining algorithm (inline_worthy)
Much of the hardest work for inlining runs in ssa_inlining_pass!. However, if your question is "why didn’t my function inline?" then you will most likely be interested in inline_worthy, which makes a decision to inline the function call or not.
inline_worthy implements a cost-model, where "cheap" functions get inlined; more specifically, we inline functions if their anticipated run-time is not large compared to the time it would take to issue a call to them if they were not inlined. The cost-model is extremely simple and ignores many important details: for example, all for loops are analyzed as if they will be executed once, and the cost of an if...else...end includes the summed cost of all branches. It’s also worth acknowledging that we currently lack a suite of functions suitable for testing how well the cost model predicts the actual run-time cost, although BaseBenchmarks provides a great deal of indirect information about the successes and failures of any modification to the inlining algorithm.
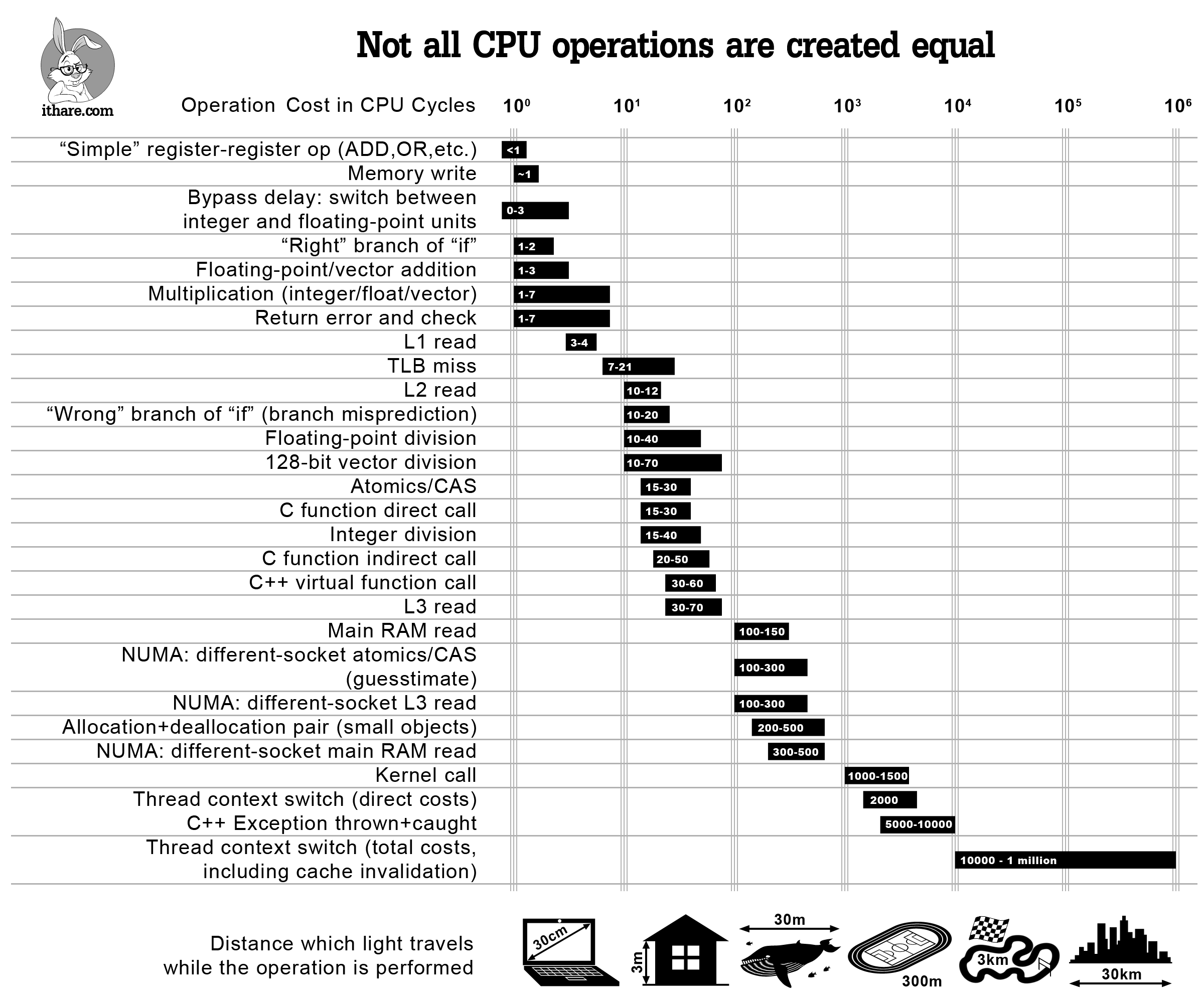
The foundation of the cost-model is a lookup table, implemented in add_tfunc and its callers, that assigns an estimated cost (measured in CPU cycles) to each of Julia’s intrinsic functions. These costs are based on standard ranges for common architectures (see Agner Fog’s analysis for more detail).
{kind=link}
We supplement this low-level lookup table with a number of special cases. For example, an :invoke expression (a call for which all input and output types were inferred in advance) is assigned a fixed cost (currently 20 cycles). In contrast, a :call expression, for functions other than intrinsics/builtins, indicates that the call will require dynamic dispatch, in which case we assign a cost set by Params.inline_nonleaf_penalty (currently set at 1000). Note that this is not a "first-principles" estimate of the raw cost of dynamic dispatch, but a mere heuristic indicating that dynamic dispatch is extremely expensive.
Each statement gets analyzed for its total cost in a function called statement_cost. You can display the cost associated with each statement as follows:
julia> Base.print_statement_costs(stdout, map, (typeof(sqrt), Tuple{Int},)) # map(sqrt, (2,))
map(f, t::Tuple{Any}) @ Base tuple.jl:281
0 1 ─ %1 = $(Expr(:boundscheck, true))::Bool
0 │ %2 = builtin Base.getfield(_3, 1, %1)::Int64
1 │ %3 = intrinsic Base.sitofp(Float64, %2)::Float64
0 │ %4 = intrinsic Base.lt_float(%3, 0.0)::Bool
0 └── goto #3 if not %4
0 2 ─ invoke Base.Math.throw_complex_domainerror(:sqrt::Symbol, %3::Float64)::Union{}
0 └── unreachable
20 3 ─ %8 = intrinsic Base.Math.sqrt_llvm(%3)::Float64
0 └── goto #4
0 4 ─ goto #5
0 5 ─ %11 = builtin Core.tuple(%8)::Tuple{Float64}
0 └── return %11The line costs are in the left column. This includes the consequences of inlining and other forms of optimization.