PID Controller
|
页面进行中。 |
的PID控制器。
模块类型: SubSystem
|
PID Controller 库中的路径: |
|
Discrete PID Controller 库中的路径: |


资料描述
座 PID Controller 实现PID控制器(PID,PI,PD,只有P或只有I)。
块的输出是输入信号的加权和、输入信号的积分以及输入信号的导数。 求和权重由比例、积分和微分系数设置。 一阶极点对差分分量进行滤波。
该单元支持几种类型和结构的调节器。 可能的选择:
*控制器类型(PID,PI,PD,只有P或只有I);
*调节器形状(平行或完美);
*时域(连续或离散);
*初始条件;
*输出饱和限制和内置抗饱和机制;
*信号跟踪,实现平稳控制传输和多电路控制。
当这些参数被改变时,块的内部结构改变:相应的子系统选项被激活。
港口
入口
# IN_1 — 输入信号
+
标量,标量 | 向量资料 | 矩阵
Details
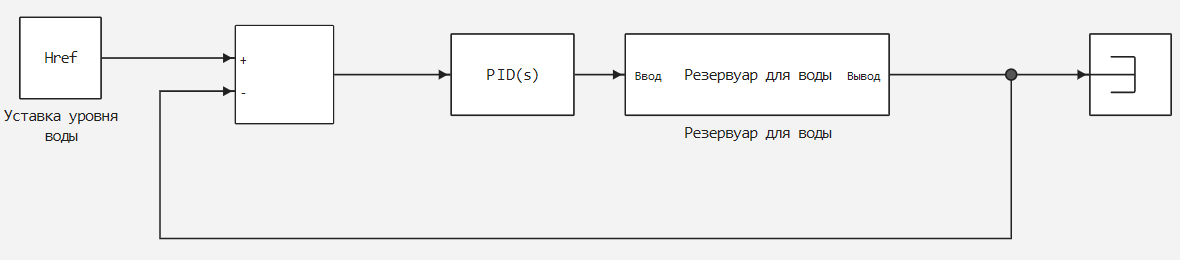
受控系统的设定值和输出信号之间的差值,如下图所示:
如果输入信号是矢量,则该块分别处理每个信号,矢量化PID控制器的系数并形成相同大小的矢量输出信号。 可以以与输入信号相同大小的矢量的形式设置PID控制器的系数和一些其他参数。 这相当于为输入信号中的每个条目设置单独的PID控制器。
| 数据类型 |
|
# 分机 — 离散积分器时间
+
标量,标量
Details
离散积分器的时间,作为标量给出。 您可以使用离散积分器自己的时间值,它决定了块执行速度在 AnyMath . 离散积分器的时间值应对应于单元在有条件执行的子系统内部使用时外部中断的平均采样率。
换句话说,您可以设置值 对于下面的积分器方法中的任何一种,其方式使其对应于外部中断的平均采样率。 在离散时间中,调节器的传递函数的微分项为
哪里 取决于积分方法:
-
Forward Euler: -
Backward Euler: -
Trapezoidal:
有关离散积分的详细信息,请参阅块的描述 Discrete-Time Integrator.
依赖关系
要使用此端口,请设置参数 Time-domain: 价值 Discrete-time 并选中该框 PID Controller is inside conditionally executed subsystem .
| 数据类型 |
|
# *P*是 一比例系数
+
标量,标量 | 向量资料
Details
比例系数的最终实数值,由与块相关的外部源表示。 设置增益系数的外部方式是有用的,例如,当将PID控制器的另一参数化与块的PID控制器的系数进行比较时。 也可以使用用于设置增益系数的外部方法来实现程序增强型PID控制。 在具有增益的程序化变化的控制中,PID控制器的系数使用模型中的逻辑或其他计算确定并馈送到块。
依赖关系
要使用此端口,请设置参数 Source: 价值 external.
| 数据类型 |
|
# *我*是 的积分系数
+
标量,标量 | 向量资料
Details
积分系数的最终实值,由与块相关的外部源表示。 设置增益系数的外部方式是有用的,例如,当将PID控制器的另一参数化与块的PID控制器的系数进行比较时。 也可以使用用于设置增益系数的外部方法来实现程序增强型PID控制。 在具有增益的程序化变化的控制中,PID控制器的系数使用模型中的逻辑或其他计算确定并馈送到块。
当增益系数被外部设置时,积分系数的时间变化也被积分。 该结果源于PID控制器的系数在块内实现的方式。 有关详细信息,请参阅参数说明。 Source: .
依赖关系
要使用此端口,请设置参数 Source: 价值 external.
| 数据类型 |
|
# *D*是 的微分系数
+
标量,标量 | 向量资料
Details
差分系数的最终实值,由与块相关的外部源表示。 设置增益系数的外部方式是有用的,例如,当将PID控制器的另一参数化与块的PID控制器的系数进行比较时。 也可以使用用于设置增益系数的外部方法来实现程序增强型PID控制。 在具有增益的程序化变化的控制中,PID控制器的系数使用模型中的逻辑或其他计算确定并馈送到块。
当从外部设置增益系数时,差分系数的时间变化也被微分。 该结果源于PID控制器的系数在块内实现的方式。 有关详细信息,请参阅参数说明。 Source: .
依赖关系
要使用此端口,请设置参数 Source: 价值 external.
| 数据类型 |
|
# *N*是 导数的过滤系数
+
标量,标量 | 向量资料
Details
外部源相对于块表示的滤波器增益的最终实数值。 设置增益系数的外部方式是有用的,例如,当将PID控制器的另一参数化与块的PID控制器的系数进行比较时。 也可以使用用于设置增益系数的外部方法来实现程序增强型PID控制。 在具有增益的程序化变化的控制中,PID控制器的系数使用模型中的逻辑或其他计算确定并馈送到块。
依赖关系
要使用此端口,请设置参数 Source: 价值 external.
| 数据类型 |
|
# ydot — 外部导数
+
标量,标量 | 向量资料
Details
控制对象信号的导数 ,通过此输入端口直接供给到单元。 如果模型中存在导数信号,并且您需要跳过计算块内的导数,这很有用。
依赖关系
要使用此端口,请选中此框 Use externally sourced derivative .
| 数据类型 |
|
# TR — 跟踪信号
+
标量,标量 | 向量资料
Details
信号来监测所述控制器的输出信号。 当信号跟踪有效时,跟踪信号和块输出之间的差被反馈到积分器输入。 信号跟踪对于在两个调节器之间切换的系统中实现平滑的控制转移以及防止多电路控制系统中的饱和非常有用。 有关详细信息,请参阅参数说明 Enable tracking mode .
依赖关系
要使用此端口,请选中此框 Enable tracking mode .
| 数据类型 |
|
# *UpperLimit*是 输出信号的饱和上限
+
标量,标量 | 向量资料
Details
外部源相对于块提供的块输出信号的上限。 如果比例、积分和微分动作的加权和超过此端口上设置的值,则单元的输出信号保持在该值。
依赖关系
要使用此参数,请在参数组中 Output saturation 勾选方格 Limit output 和参数 Source: 设置值 external.
| 数据类型 |
|
# *低限*是 输出信号的饱和下限
+
标量,标量 | 向量资料
Details
外部源相对于块提供的块输出信号的下限。 如果比例、积分和微分动作的加权和变得低于在该端口上设置的值,则块的输出信号保持在该值。
依赖关系
要使用此参数,请在参数组中 Output saturation 勾选方格 Limit output 和参数 Source: 设置值 external.
| 数据类型 |
|
# extAW — 外部抗饱和算法
+
标量,标量 | 向量资料
Details
在此端口上指定自定义过载保护算法。 该块提供了防止过饱和的两种内置方法,然而,对于积分器的公开,这些方法取决于块分量之和是否超过输出信号的指定限制。 如果PID控制器阻塞后模型中存在饱和或限制,则可以使用*extAW*输入端口实现自定义过载保护逻辑。 该模块还在*preInt*输出端口上的积分器前面提供信号,可用于实现自定义算法。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation 和参数 Anti-windup Method: 设置值 external.
| 数据类型 |
|
出口;出口
# OUT_1 — 稳压器输出
+
标量,标量 | 向量资料
Details
控制器的输出,其是输入信号的加权和、输入信号的积分和输入信号的导数。 求和权重由比例、积分和微分系数设置。 求和中涉及哪些项取决于参数的值。 Controller: . 其他参数改变块的输出,例如参数设置的饱和限值 Upper limit: 及 Lower limit: .
如果输入是矢量信号,则控制器的输出是矢量信号。 在这种情况下,块充当 独立PID控制器,其中 -输入向量中的信号数。
| 数据类型 |
|
# preInt — 积分器之前的信号
+
标量,标量 | 向量资料
Details
积分器之前的输出信号的端口。 将此信号用作*extAW*输入端口上提供的自定义过载保护算法的输入。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation 和参数 Anti-windup Method: 设置值 external.
| 数据类型 |
|
参数
Main
#
Controller: —
调节器的类型
PID | PI | PD | P | I
Details
设置调节器的组成:
-
PID-比例,积分和微分部分。 -
PI-只有比例和积分部分。 -
PD-只有比例和微分部分。 -
P-只有比例部分。 -
I-只有组成部分。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
#
Form: —
调节器的结构
Ideal | Parallel
Details
设置调节器的结构:
-
Parallel-控制器的输出代表比例,积分和微分部分的总和,独立加权由 , 和 相应地。 例如,对于具有连续时间的平行形状的PID控制器,传递函数具有形式:对于具有离散时间的平行形状的控制器,传递函数具有形式:
参数在哪里 Integrator method: 及 Filter method: 定义 和 相应地。
-
Ideal-比例增益 对所有部分的总和有效。 例如,对于具有连续时间的理想形状的PID控制器,传递函数具有形式:对于具有离散时间的理想形状的调节器,传递函数具有形式:
参数在哪里 Integrator method: 及 Filter method: 定义 和 相应地。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
#
Time-domain: —
离散或连续时间控制器
Continuous-time | Discrete-time
Details
为值 Discrete-time 建议明确设置块的计算步骤。 请参阅参数说明 Sample time (-1 for inherited): . 选择值时 Discrete-time 参数也包括在内 Integrator method: 及 Filter method: .
当块 PID Controller 它位于具有同步状态管理的模型中,无法选择值 Continuous-time.
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Discrete-time settings
# Sample time (-1 for inherited): — 计算步骤之间的间隔
Details
将计算步骤之间的间隔指定为非负数。 要继承计算步骤,请将此参数设置为 −1.
建议明确地设置调节器的计算步骤,特别是如果预期后续块的计算步骤会改变。 调节器系数的影响 , , 和 取决于计算步骤。 因此,对于一组给定的系数值,改变计算步骤改变了调节器的性能。
如果要启动具有外部指定或可变采样周期的块,请将此参数设置为 −1 把积木放进去 Triggered Subsystem. 然后在期望的采样周期启动子系统。
|
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# PID Controller is inside conditionally executed subsystem — 离散积分器时间端口的激活
Details
对于离散PID控制器,激活离散积分器的时间端口*extTs*以将采样周期的特征值用于离散积分器。 为确保正确集成,请使用*extTs*端口指定标量值。 于精确的离散时间积分。
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Integator and Filter methods
#
Integrator method: —
离散控制器中的集成方法
Forward Euler | Backward Euler | Trapezoidal
Details
在离散时间中,调节器的传递函数的积分项为 ,在哪里 取决于积分方法:
-
Forward Euler-直矩形(左)近似值:当奈奎斯特极限与调节器的吞吐量相比较大时,此方法最适合计算步骤之间的小间隔。 对于长采样时间,该方法
Forward Euler它可能导致不稳定性,即使在连续时间稳定的系统离散化的情况下也是如此。 -
Backward Euler-逆矩形(右)近似:方法的优点
Backward Euler问题是使用这种方法对稳定的连续时间系统进行离散化总是产生稳定的离散时间结果。 -
Trapezoidal-双线性近似:方法的优点
Trapezoidal问题是使用这种方法对具有连续时间的稳定系统进行离散化总是给出具有离散时间的稳定结果。 在所有可用的集成方法中,该方法Trapezoidal给出采样系统的频域属性与对应的连续时间系统之间最接近的对应关系。
|
对于方法 标志被选中 *Limit output ,并为参数 Anti-windup Method: 除此以外,任何值都被设置 标志被选中 *Enable tracking mode . |
有关离散积分的详细信息,请参阅块的描述 Discrete-Time Integrator.
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time,而对于参数 Controller: 价值 PID, PI 或 I.
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
#
Filter method: —
一种离散调节器中导数的计算方法
Forward Euler | Backward Euler | Trapezoidal
Details
在离散时间中,调节器的传递函数的微分项为
哪里 取决于积分方法:
-
Forward Euler-直矩形(左)近似值:当奈奎斯特极限与调节器的容量相比较大时,这种方法最适合于计算步骤之间的小间隔。 对于长采样时间,该方法
Forward Euler它可能导致不稳定性,即使在连续时间稳定的系统离散化的情况下也是如此。 -
Backward Euler-逆矩形(右)近似:方法的优点
Backward Euler问题是使用这种方法对具有连续时间的稳定系统进行离散化总是给出具有离散时间的稳定结果。 -
Trapezoidal-双线性近似:方法的优点
Trapezoidal问题是使用这种方法对稳定的连续时间系统进行离散化总是产生稳定的离散时间结果。 在所有可用的集成方法中,该方法Trapezoidal给出采样系统的频域属性与对应的连续时间系统之间最接近的对应关系。
有关离散积分的详细信息,请参阅块的描述 Discrete-Time Integrator.
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time 并选中该框 Use filtered derivative .
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Controller parameters
#
Source: —
调节器增益系数和滤波器系数的数据源
internal | external
Details
激活参数的外部输入允许您计算PID控制器的增益系数和块外的滤波器系数,并将它们作为输入信号传输到块。
-
internal—使用参数设置调节器的增益系数和滤波器系数 Proportional (P): , Integral (I): , Derivative (D): 及 Filter coefficient (N): . -
external-使用输入端口*P*、I、*D*和*N*在外部设置PID控制系数和滤波器系数。
设置增益系数的外部方式是有用的,例如,当将PID控制器的另一参数化与块的PID控制器的系数进行比较时。 也可以使用用于设置增益系数的外部方法来实现程序增强型PID控制。 在具有增益的程序化变化的控制中,PID控制器的系数使用模型中的逻辑或其他计算确定并馈送到块。
| 如果使用外部输入增益因子,请避免使其依赖于输出信号*OUT_1*。 通过这种依赖性,PID控制器的所得传递函数导致代数回路,因为有必要知道该值以便计算块的输出信号的值。 这个代数循环容易出现不稳定和发散。 代替输出信号,尝试用时间和块的输入信号来表示增益系数。 有关代数循环的更多信息,请参阅文章 代数循环. |
当应用外部增益因子时,积分和微分系数的值随时间的变化分别被积分和微分。 这是因为在连续和离散情况下,增益因子在积分或微分之前应用于信号。 例如,对于具有外部输入的连续PID控制器,积分项实现如下图所示。

块内部有输入信号 乘以积分系数 集成之前从外部供给。 结果是:
因此,积分器的增益包含在积分中。 同样,在块的导数部分,乘以微分系数先于微分,这导致微分的增益系数的微分。 .
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Proportional (P): — 比例系数
Details
比例系数的最终实数值。 如果为参数 Form: 值已设置:
-
Parallel-比例作用不依赖于积分和导数效应。 例如,对于连续时间并行PID控制器,传递函数具有形式:对于具有离散时间的平行形控制器,传递函数具有形式:
参数在哪里 Integrator method: 及 Filter method: 定义 和 相应地。
-
Ideal-比例系数 适用于所有部分的总和。 例如,对于具有连续时间的理想形状的PID控制器,传递函数具有形式:对于具有离散时间的理想形状的调节器,传递函数具有形式:
参数在哪里 Integrator method: 及 Filter method: 定义 和 相应地。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID, PD, PI 或 P,而对于参数 Source: 价值 internal.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Integral (I): — 的积分系数
Details
积分系数的最终实数值。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID, PI 或 I,而对于参数 Source: 价值 internal.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Derivative (D): — 的微分系数
Details
差分系数的最终实数值。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID 或 PD,而对于参数 Source: 价值 internal.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Filter coefficient (N): — 导数过滤系数
Details
滤波器增益的最终实数值。 滤波器系数确定块的差分部分中的滤波器极点的位置。 滤波器极点的位置取决于参数的值 Time-domain: :
-
Continuous-time-杆的位置是s= −N. -
Discrete-time-极点的位置取决于参数的值 Filter method: :-
前进欧拉-滤极的位置为 -
向后欧拉-滤极的位置为 -
梯形-滤极的位置为
-
块不支持 N=Inf (理想的未过滤衍生物)。 如果为参数 Time-domain: 值已设置 Discrete-time,您可以取消选中该框 Use filtered derivative 去除导数过滤器。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID 或 PD,而对于参数 Source: 价值 internal.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Use I*Ts (optimal for codegen) — 使用积分系数乘以采样周期
Details
对于具有积分效应的离散稳压器,该单元将积分增益作为输入,并在内部乘以积分过程中的采样周期。 如果选中此框,它将明确设置乘以采样周期的积分增益。 这减少了内部计算量,并且在需要提高生成代码的执行时间时非常有用。
对于连续稳压器,该参数的激活不会影响积分增益。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID, PI 或 I.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Use externally sourced derivative — 在块的输入端口上指定导数
Details
选中此复选框可指定控制对象信号的导数。 直接通过输入端口*ydot*。 如果模型中存在导数信号,并且您需要跳过计算块内的导数,这很有用。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID 或 PD.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Use filtered derivative — 将过滤器应用于导数
Details
仅适用于离散时间PID控制器:取消选中此框以将已过滤的导数替换为未过滤的值。 在这种情况下,调节器的传递函数的微分项将等于
对于连续时间PID控制器,总是对导数分量进行滤波。
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time,而对于参数 Controller: 价值 PID 或 PD.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Integrator and Filter initial conditions
# Integrator: — 积分器的初始条件
Details
积分器的初始条件,用于在仿真开始时初始化积分器。
积分器的初始条件不能为 南 或 资讯.
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID, PI 或 I.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Differentiator: — 未过滤导数的初始条件
Details
在模拟开始时用于初始化微分器的未滤波导数的初始条件。
导数的初始条件不能是 南 或 资讯.
依赖关系
若要使用此参数,请为参数设置 Time-domain: 价值 Discrete-time,取消选中该框 Use filtered derivative 和参数 Controller: 设置值 PID 或 PD.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Filter: — 初始过滤条件
Details
用于在模拟开始时初始化差分滤波器的初始滤波器条件。
初始筛选条件不能为 南 或 资讯.
依赖关系
如果为参数 Time-domain: 值已设置 Discrete-time 然后选中该框 Use filtered derivative ,并为参数 Controller: 设置值 PID 或 PD.
如果为参数 Time-domain: 值已设置 Continuous-time,则对于参数 Controller: 设置值 PID 或 PD.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Tracking mode
# Enable tracking mode — 信号跟踪激活
Details
信号跟踪允许单元的输出端口跟随施加到*TR*端口的跟踪信号。 当信号跟踪有效时,跟踪信号和单元输出之间的差被反馈到增益积分器的输入。 ,由指定参数 Tracking coefficient (Kt): . 信号跟踪有多种应用,包括多电路控制系统中的平滑控制转移和饱和防止。
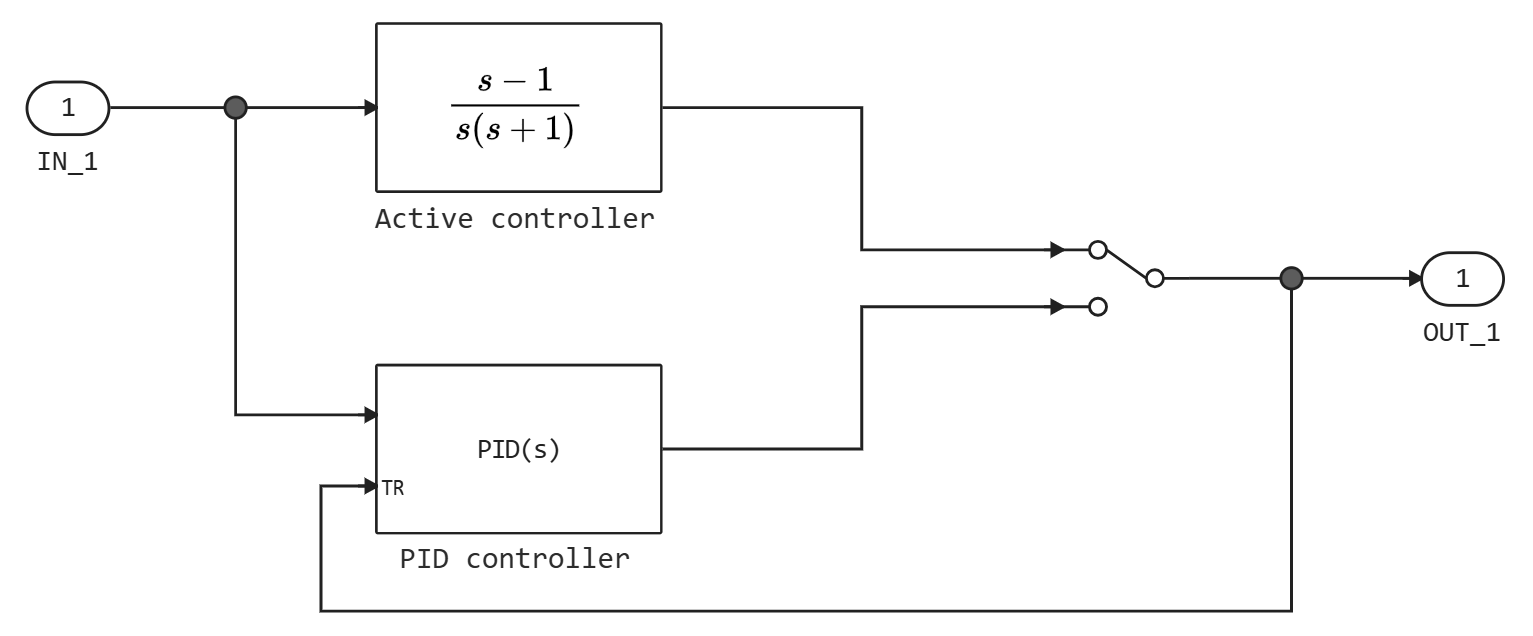
主控转移
在两个调节器之间切换的系统中,使用信号跟踪实现平稳的控制转移。 要在PID控制器和另一个控制器之间传输控制,请将控制器的输出连接到输入端口*TR*,如下图所示。
结构管理
使用信号跟踪来防止多电路系统中控制单元中的信号累积,如下面的模型所示。
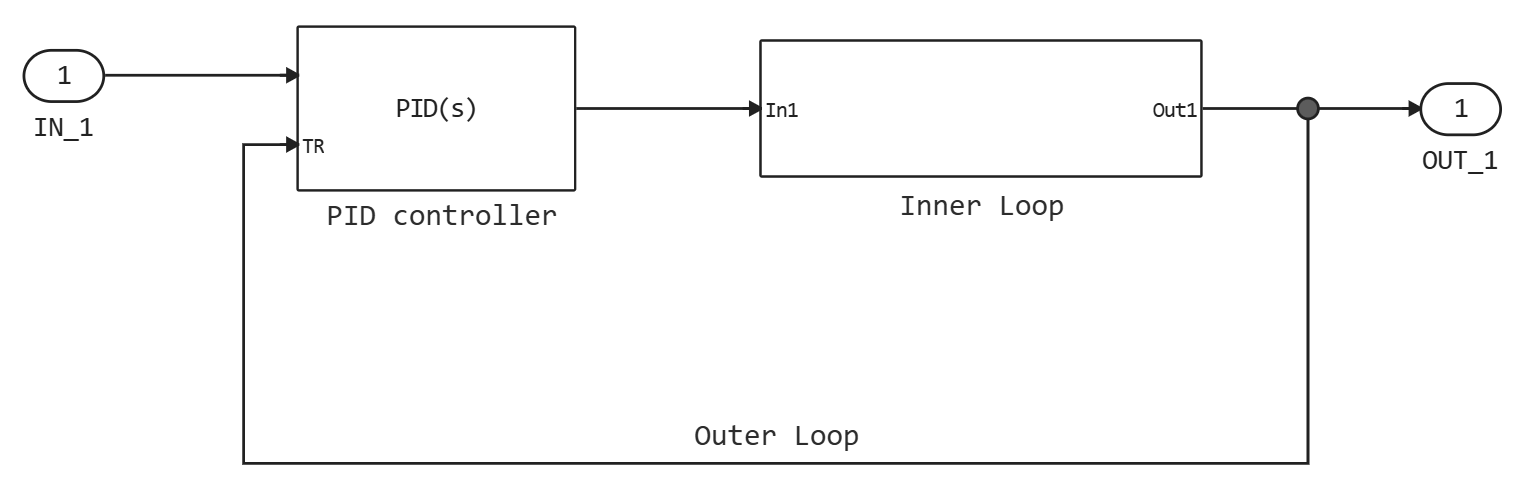
内循环的子系统包含下图所示的块。
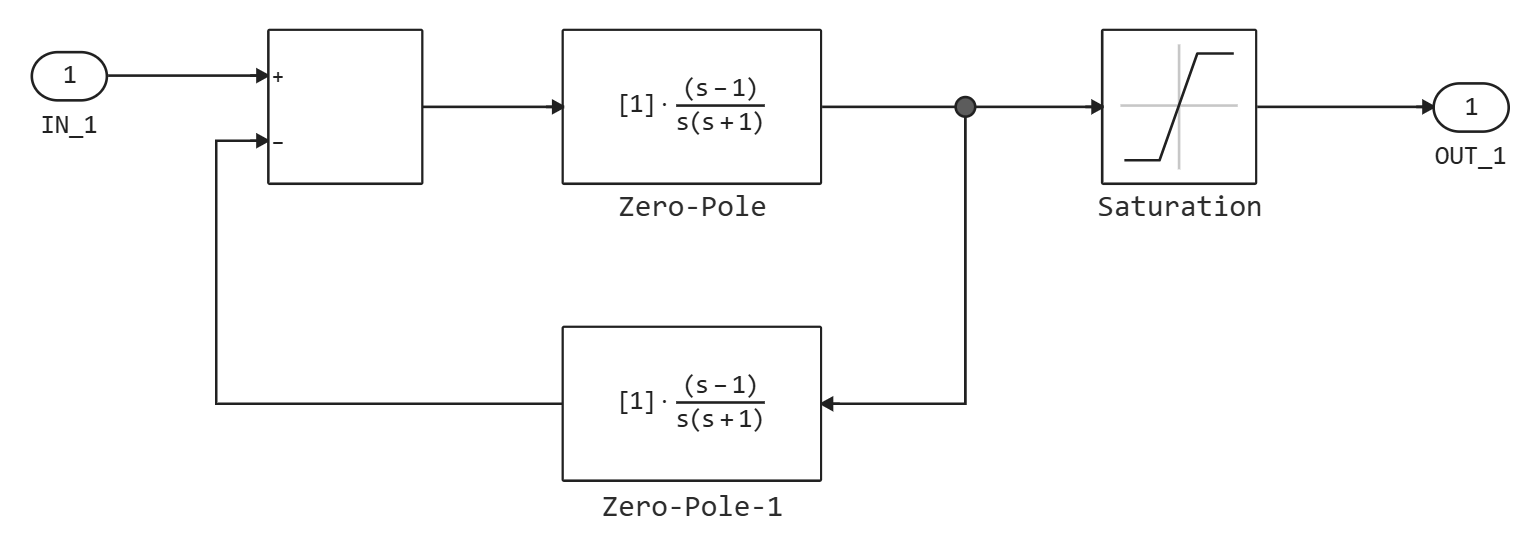
由于PID控制器监视内部电路的输出,其输出永远不会超过内部电路的饱和输出。
依赖关系
若要使用此参数,请为参数设置 Controller: 价值 PID, PI 或 I.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Tracking coefficient (Kt): — 信号跟踪反馈环路增益
Details
选中复选框时 Enable tracking mode *TR*信号与单元输出信号的差值反馈到增益积分器的输入 . 使用此参数设置此反馈环路中的增益。
对于离散控制器,如果选中该框 Use I*Ts (optimal for codegen) ,此参数的值将等于 ,在哪里 -所需的增益,和 -采样周期。
依赖关系
若要使用此选项,请选中此框 Enable tracking mode .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Output saturation
# Limit output — 块的输出信号限制为预设饱和值
Details
通过选中此框,您可以限制块的输出信号,因此单独的块 Saturation*不需要调节器后。 这还允许您激活内置的块保护机制以防止过饱和(请参阅参数描述 *Anti-windup Method:).
使用参数设置输出信号的饱和限值 Upper limit: 及 Lower limit: . 您还可以通过输入端口*UpperLimit*和*LowerLimit*通过设置参数从外部指定饱和限制 Source: 价值 external 在参数组中 Output saturation 在标签上 Saturation .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
#
Source: —
输出饱和限制的来源
internal | external
Details
使用该参数设置块的输出信号的饱和上限和饱和下限。
-
internal-使用参数设置输出信号的饱和限制 Upper limit: 及 Lower limit: . -
external-使用输入端口*UpperLimit*和*LowerLimit*在外部设置输出信号的饱和限制。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation .
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Upper limit: — 块输出信号的饱和上限
Details
定块输出信号的上限。 当比例、积分和微分动作的加权和超过该值时,单元的输出信号保持在饱和上限。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Lower limit: — 块输出信号的饱和下限
Details
定块输出信号的下限。 当比例、积分和微分动作的加权和低于该值时,单元的输出信号保持在饱和下限。
依赖关系
要使用此选项,请选中该框 Limit output 在参数组中 Output saturation .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Anti-windup
#
Anti-windup Method: —
防止积分器过饱和的方法
none | back-calculation | clamping | external
Details
选中复选框时 Limit output 如果控制器组件的加权和超过输出信号的设定限值,则该单元的输出信号保持在设定电平。 然而,积分器的输出信号可能继续增长(积分器过饱和),增加了单元的输出信号与单元的分量之和之间的差。 换句话说,单元中的内部信号可以是无限的,即使输出信号似乎受到饱和限制的限制。 如果没有防止积分器过饱和的机制,两种可能的结果是:
*如果输入信号的符号从未改变,则积分器继续积分,直到发生溢出。 溢出值是积分器输出信号的数据类型的最大值或最小值。
*如果输入信号的符号在加权和已经超过输出信号的极限之后改变,则可能需要很长时间来恢复积分器的操作并在块的饱和极限内返回加权和。
在任何情况下,调节器的性能可能会下降。 为了在没有防止过饱和的机制的情况下对抗过饱和的影响,可能需要失谐调节器(例如,通过降低增益系数),这会减慢其操作。 要避免此问题,请使用此参数激活过载保护机制。
-
none-未使用过载保护机制。 -
back-calculation—当单元的输出饱和时打开积分器,向其反馈饱和和不饱和控制信号之间的差值。 下图显示了一个连续稳压器的反馈电路。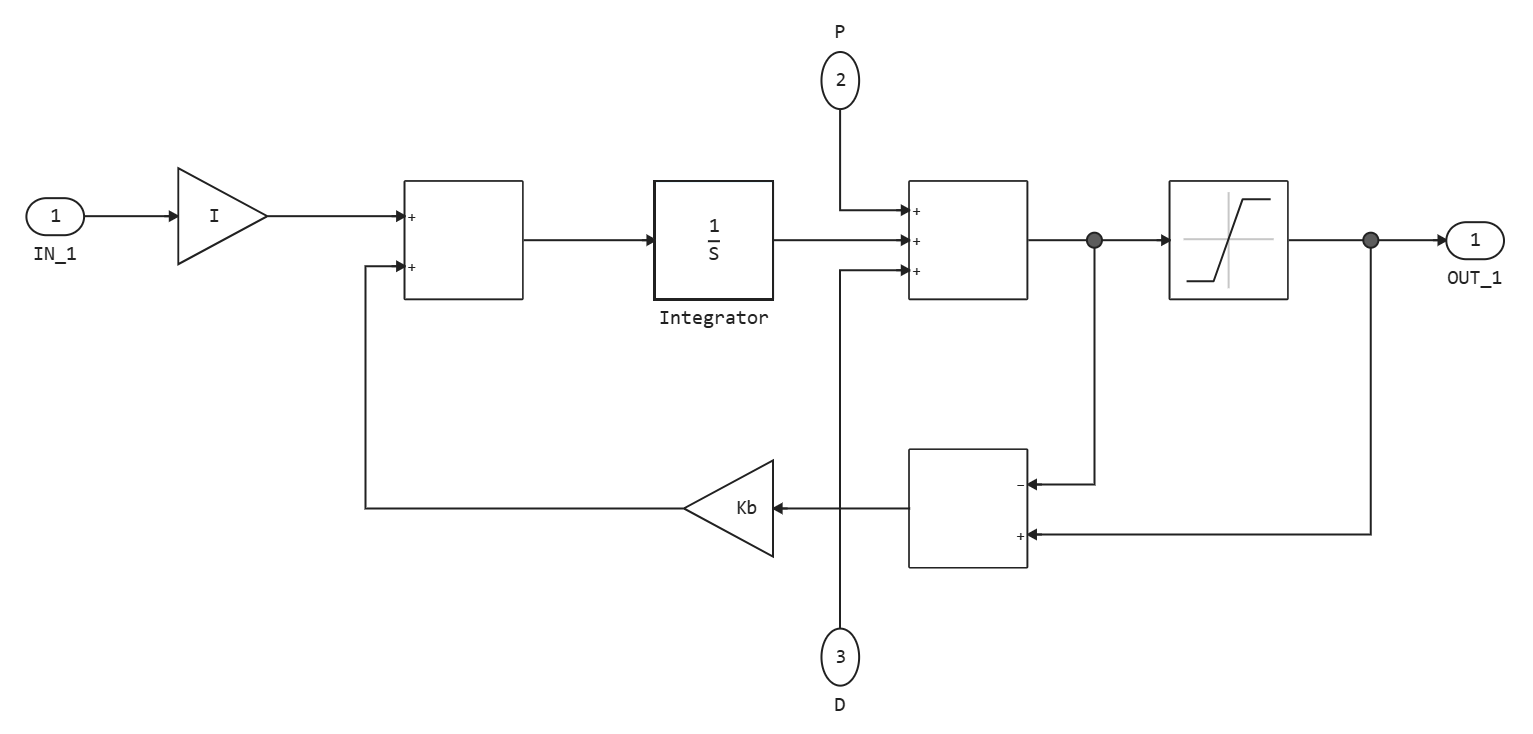
使用参数 Back-calculation coefficient (Kb): 设置反馈环路的增益以防止饱和。 通常安装就足够了 或用于具有差动作用的调节器 . 反向计算对于延迟时间相对较长的对象[1]是有效的。
-
clamping-有时信号的限制被称为条件积分。当满足以下两个条件时,集成将停止:
块分量之和超过输出信号的限制。 积分器的输入信号和饱和单元的输入信号具有相同的符号。
+ 当不再满足任何这些条件时,集成将恢复。 该限制对于延迟时间相对较短的对象很有用,但它会导致延迟时间较长的瞬态响应较差。
-
external-内置过饱和保护方法基于块分量之和超过块输出信号的设定限值这一事实。 如果PID控制器阻塞后模型中存在饱和或限制,则可以使用*extAW*输入端口实现自定义过载保护逻辑。 该模块还在*preInt*输出端口上提供积分器前面的信号,可用作自定义算法的输入信号。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation .
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Back-calculation coefficient (Kb): — 反馈环路增益防止过饱和
Details
方法 back-calculation 为了防止过饱和,积分器在块的输出饱和时打开。 这通过来自积分器的饱和和非饱和控制信号之间的差的反馈来完成。 使用此参数设置增益因子。 反馈回路以防止过饱和。 有关详细信息,请参阅参数说明 Anti-windup Method: .
对于离散控制器,如果选中该框 Use I*Ts (optimal for codegen) ,此参数的值将等于 ,在哪里 -所需的增益,和 -采样周期。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Output saturation 和参数 Anti-windup Method: 设置值 back-calculation.
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
Integrator saturation
# Limit output — 将积分器的输出信号限制为预设的饱和值
Details
通过选中此框,您可以将积分器的输出信号限制在指定范围内。 当积分器的输出信号达到极限时,积分器将停止工作,以防止积分过饱和。 使用参数设置饱和限值 Upper limit: 及 Lower limit: .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Upper limit: — 积分器饱和度的上限
Details
指定积分器输出的上限。 积分器的输出信号保持在这个值,否则它将超过这个值。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Integrator saturation .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |
# Lower limit: — 积分器的饱和下限
Details
指定积分器输出的下限。 积分器的输出信号保持在这个值,否则它将下降到这个值以下。
依赖关系
若要使用此选项,请选中此框 Limit output 在参数组中 Integrator saturation .
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
无 |
| 可计算 |
是 |