间隙
背隙系统的行为模型。
模块类型: Backlash
|
库中的路径: |

资料描述
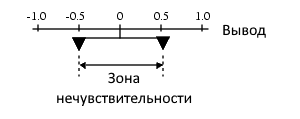
座 间隙 实现一个系统,其中输入信号的变化导致输出的相同变化,除非输入信号的符号发生变化(它在增加后开始减少,反之亦然)。 当发生这种情况时,在第一时刻,改变输入信号不会影响输出。 系统中的齿隙量称为 死区,由参数设置 死区宽度 . 死区 相对于输出信号的值对称。 下图显示了默认宽度为 死区 等于的初始状态 1,和输出信号的初始值,等于 0.
齿隙系统可以采用三种模式之一。
| 模式 | 入口 | 结论 |
|---|---|---|
残疾人士 |
死区内。 |
它保持不变。 |
积极的方向 |
出不敏感的区域而增加。 |
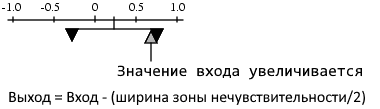
它等于输入端的值减去死区宽度的一半。 |
的负方向 |
出不敏感的区域而降低。 |
它等于输入端的值加上死区宽度的一半。 |
参数 初始输出 设置死区的初始中心。
下表显示了以下初始条件下的输出值: 死区宽度 =2和 初始输出 = 5.
| 输出值 | 条件 |
|---|---|
5 |
4⇐入口⇐6 |
入口 + 1 |
输出<4 |
入口 − 1 |
产量>6 |
例如,可以使用块 间隙 为了模拟安装在简单变速箱的输入和输出轴上的两个齿轮的啮合:输入轴通过齿轮系旋转第二个。 齿轮齿之间的间隙产生齿隙。 此间隙的宽度决定了参数的值 死区宽度 . 如果系统最初是静止的,那么输出信号的值由参数设置 初始输出 .
下图说明了该装置的操作,前提是输出信号的初始值在死区内,系统从静止状态开始。
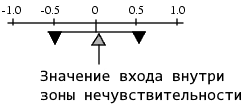
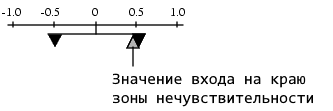
当输入增加并到达死区的末端时,它会打开输出。 输出保持在同一水平。
输入与输出交互后,输出的变化量与输入相同。
如果输入改变方向,则从输出断开。 输出保持恒定,直到输入到达死区的末端并再次触发。
参数
基本参数
#
死区宽度 —
死区的宽度
Scalar / array of real numbers
Details
设置相对于输出值居中的死区大小。 当输入信号在死区内时,输入的变化不会导致输出的变化。 当输入信号在死区之外时,输出信号的变化与输入信号一样多。
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
是 |
| 可计算 |
是 |
#
初始输出 —
初始输出值
Scalar / array of real numbers
Details
设置死区的初始中心。 如果输入信号的初始值处于死区,则输出值为 初始输出 . 如果初始输入值在死区之外,那么输出值等于初始输出加上或减去死区宽度的一半。
| 默认值 |
|
| 程序使用名称 |
|
| 可调谐 |
是 |
| 可计算 |
是 |