蒸汽轮机和调速器
速控制系统、汽轮机和轴管道的模型。
模块类型: SubSystem
|
库中的路径: |

资料描述
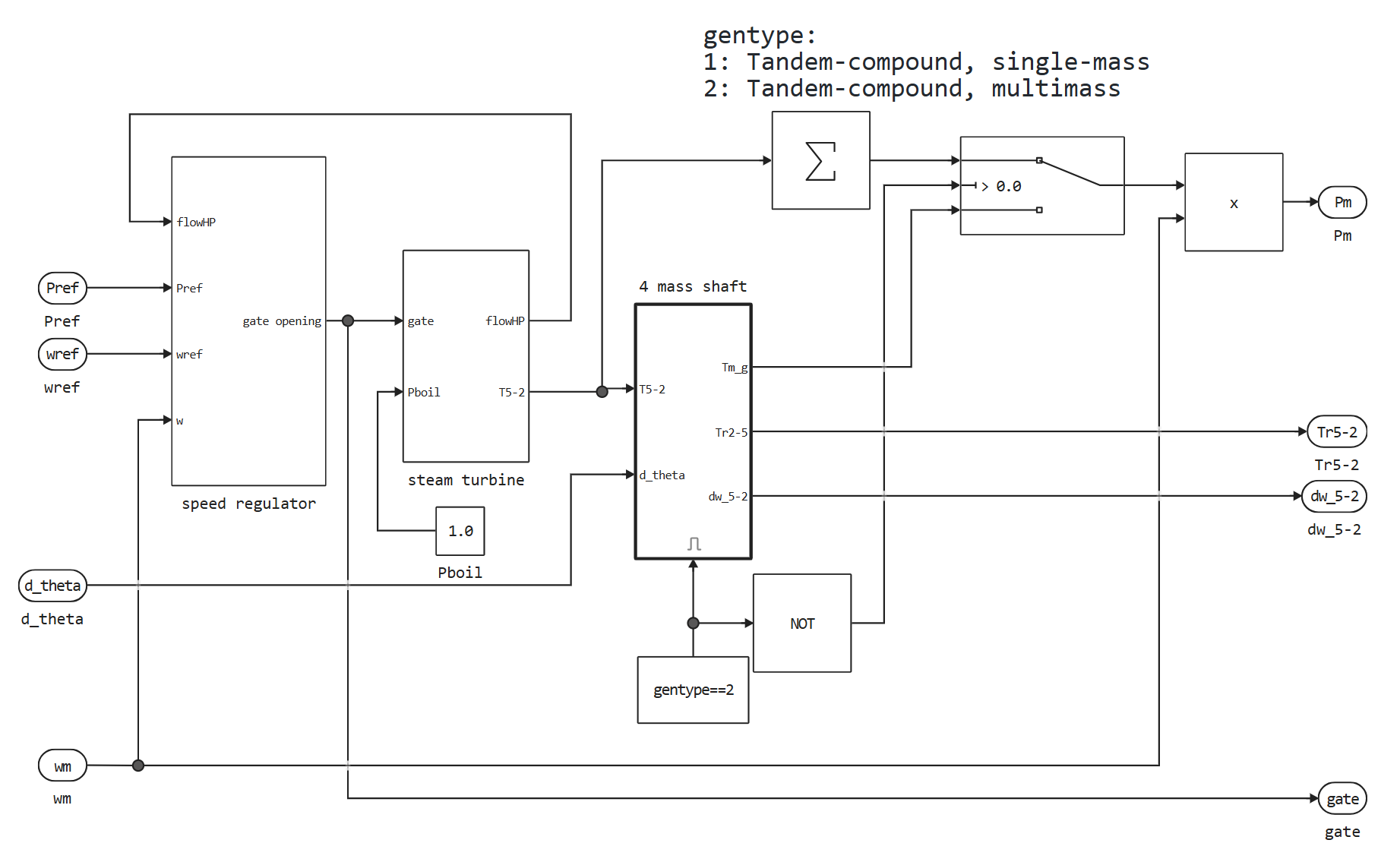
座 蒸汽轮机和调速器 实现单轴多缸汽轮机组,包括调速系统、四级汽轮机和带四个转子的轴线。
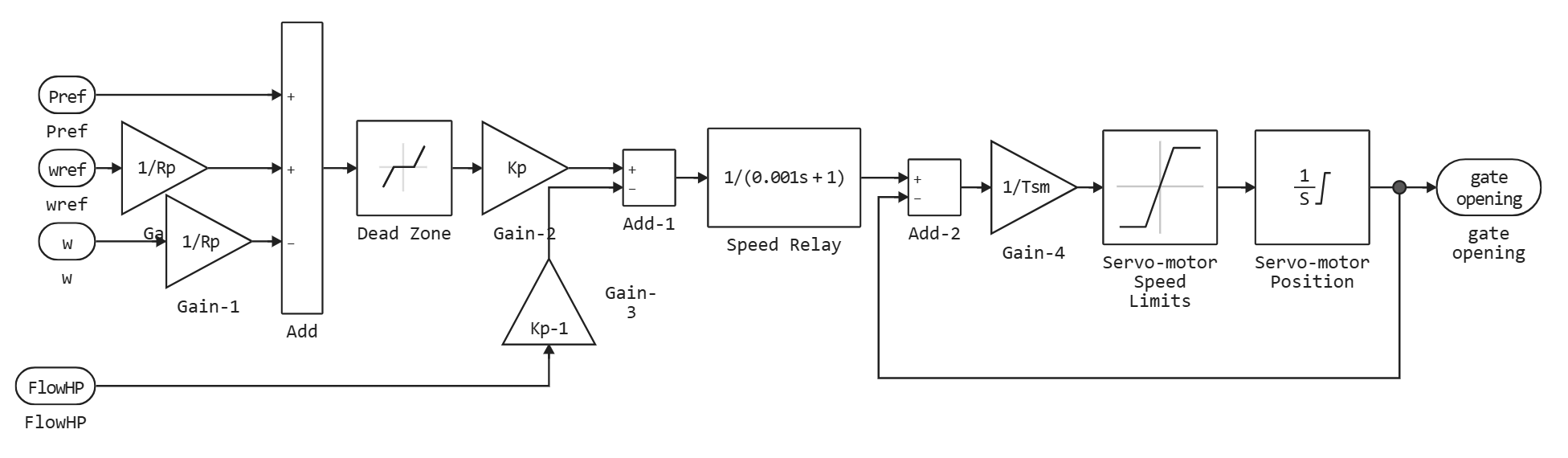
速度控制系统由P控制器、速度继电器和控制快门开启的舵机组成。
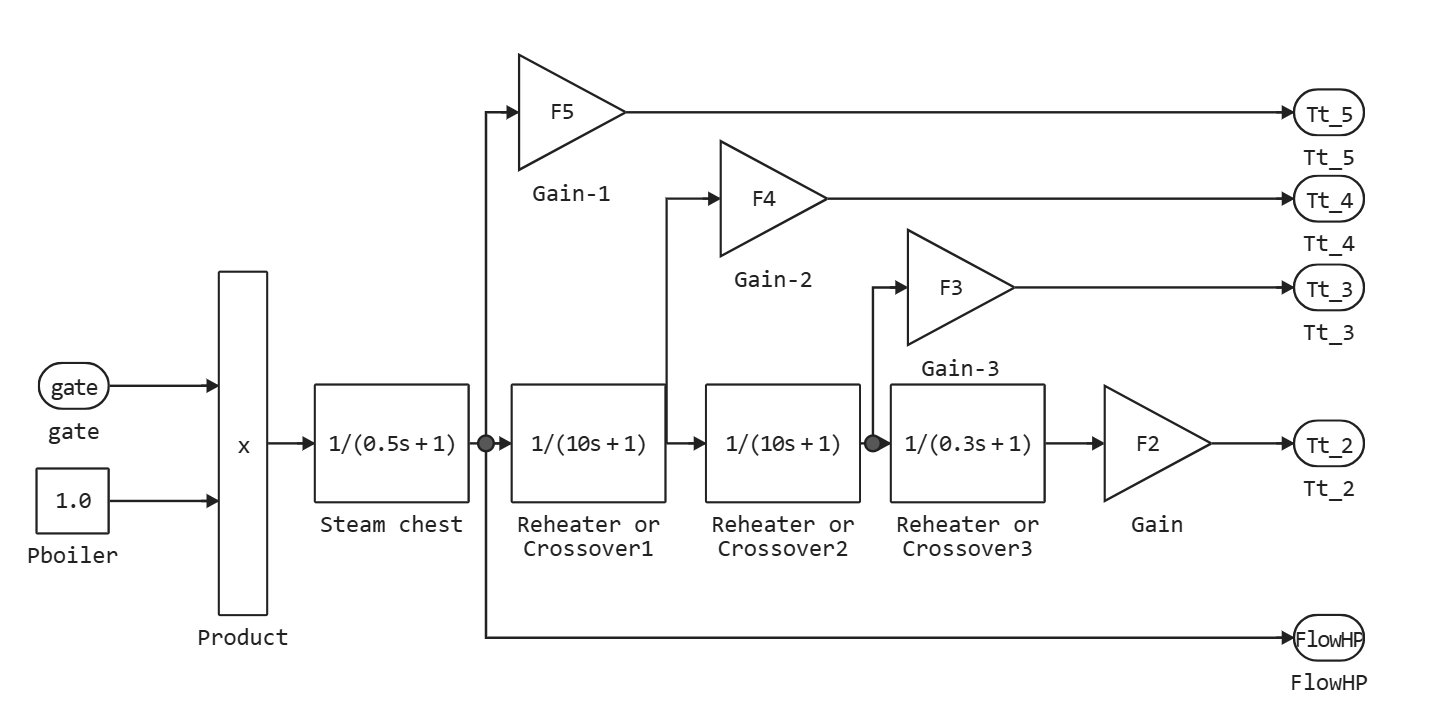
汽轮机由四个阶段组成,每个阶段都由一阶传递函数建模。 第一阶段是蒸汽锅炉,而其他三个阶段是蓄热式加热器或交叉管道。 锅炉没有建模,锅炉中的压力是恒定的,等于1O.E.涡轮扭矩的系数(分数) 它们用于在轴管道的不同级之间分配涡轮动力。
轴线模拟了一个由四个质量块组成的系统,该系统与同步机器模型中的质量块相连,该模型总共给出了五个质量块。 机器的质量表示为质量1。 汽轮机和调节器块中最接近机器质量的质量为质量2,距离机器最远的质量为质量5。 轴线的特点是质量惯性 、阻尼系数 和刚度系数 . 如果需要模拟单质量轴线,则蒸汽轮机和调节器块中的四个质量的整个轴线子系统将断开,并且来自涡轮机的所有扭矩将被求和并施加到机器的质量
港口
输入
#
ωref
—
速度设定
标量,标量
Details
相对单位的参考速度。 它通常连接到具有值的*Constant*块 1.0.
| 数据类型 |
|
| 复数支持 |
非也。 |
#
Pref
—
机械功率设定
标量,标量
Details
相对单位的参考机械功率。 定为与从连接到蒸汽轮机和调节器单元的同步机单元消耗的初始有功功率相对应的恒定值。
| 数据类型 |
|
| 复数支持 |
非也。 |
#
ωm
—
发电机转速
标量,标量
Details
相对单位的发电机转速。 这是同步机器模型最后输出的信号之一。
| 数据类型 |
|
| 复数支持 |
非也。 |
#
Δθ
—
发电机功率的角度偏差
标量,标量
Details
发电机功率的角度偏差。 也是同步机模型最后输出的信号之一。
| 数据类型 |
|
| 复数支持 |
非也。 |
参数
主要的
#
发生器类型 —
转子类型
串联轴承-单转子 | 串联复合(多质量)
Details
转子类型:单质量或多质量单轴多缸。
如果选择单质量系统,则*汽轮机和调速器*单元中的多质量轴子系统被禁用,并且涡轮转矩求和并应用于*同步机*单元中的单质量系统。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 调节器增益、永态转差系数、死区 [Kp Rp(pu) Dz(pu)] — 增益系数、静态系数和死区宽度
Details
增益系数 ,不断下降 以相对单位,以及死区的宽度 以相对单位。 将增益值设置为 3 如果要使用蒸汽流量反馈回路。 否则,设置值 1.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 速度继电器和伺服电机的时间常数 [Tsr Tsm],单位:秒 — 快门速度继电器和伺服的时间常数
Details
速度继电器的时间常数 和闸门伺服电机 几秒钟内。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 导叶开度限制 — 快门开启限制
Details
最小和最大快门打开速度 和 以每秒的相对单位,以及最小和最大快门开口 和 以相对单位。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 同步电机额定转速,单位:转/分 — 同步发电机转速
Details
发电机的同步转速以rpm为单位,由汽轮机提供动力。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Steam turbine time constants [T2 T3 T4 T5], s — 涡轮时间常数
Details
涡轮时间常数从 以前 几秒钟内。 例如,它们按涡轮扭矩的分数和质量数顺序编号, --模拟蒸汽室的涡轮机第一级的时间常数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 涡轮扭矩分配系数 [F2 F3 F4 F5] — 涡轮扭矩分数
Details
涡轮扭矩的比例从 以前 . 该向量的元素之和应等于 1 否则,将出现错误消息。 分数的数量对应于质量的数量,即 --这是施加在2个多质量轴的质量上的扭矩的分数。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 惯性系数[H2 H3 H4 H5],s — 惯性系数
Details
惯性系数从 以前 秒与多质量轴的质量有关。
依赖关系
要使用此参数,请将*生成器类型*参数设置为 串联化合物(多质量).
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 刚度系数 [K12 K23 K34 K45],单位:pu/rad — 刚度系数
Details
刚度系数从 以前 以每弧度的相对单位,与多质量轴的质量有关,即 对应于质量块1和2之间的刚度系数,依此类推。
依赖关系
要使用此参数,请将*生成器类型*参数设置为 串联化合物(多质量).
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 阻尼系数 [D2 D3 D4 D5], pu_T/pu_dw — 阻尼系数
Details
阻尼系数从 以前 ,定义为与多质量轴的质量有关的相对单位的扭矩和相对单位的速度偏差的比率。
依赖关系
要使用此参数,请将*生成器类型*参数设置为 串联化合物(多质量).
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
初始值
# 初始功率 — 初始机械功率
Details
初始机械功率。
依赖关系
要使用此参数,请将*Generator type*参数设置为 串联化合物(单质量).
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 初始功率与发电机转子角度 [Pm0(pu) th0(deg)] — 发电机的初始机械功率和初始旋转角度
Details
初始机械功率 以相对单位,与发电机的初始旋转角度 度。
依赖关系
要使用此参数,请将*Generator type*参数设置为 串联化合物(多质量).
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |