差分
一种齿轮机构,可使驱动轴以不同的速度旋转。
模块类型: Engee1DMechanical.Transmission.Gears.Differentials.Open
|
库中的路径: |

说明
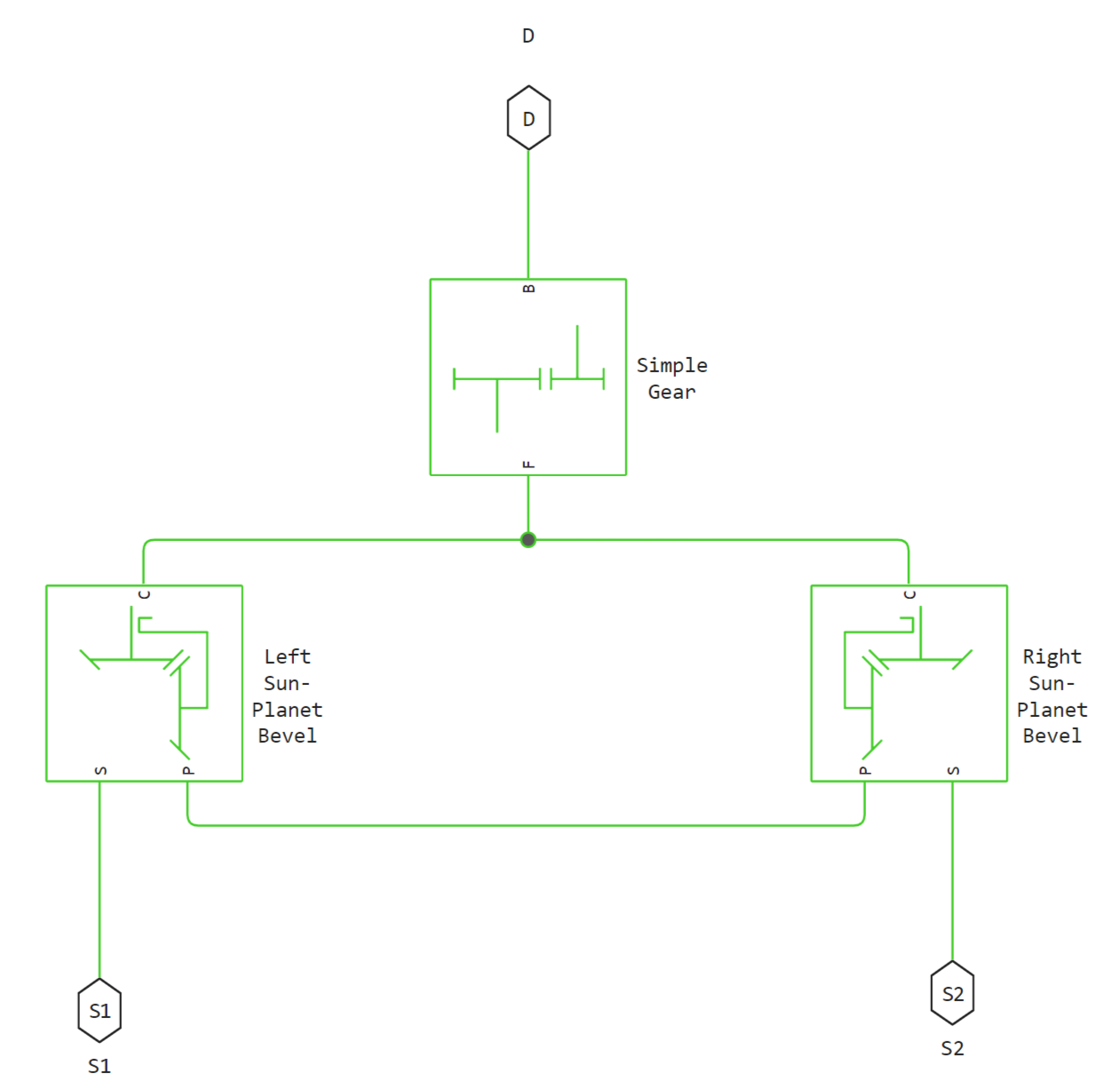
差速器是一种齿轮装置,可使从动齿轮以不同的速度旋转。差速器通常用于汽车,在转弯时可使不同的车轮以不同的速度旋转。D、S1 和 S2 端口分别代表差速器的纵向传动轴和太阳齿轮轴。其中任何一个轴都可以驱动另外两个轴。
下图显示了 差动 模块的等效框图。
为了提高齿轮模型的精度,可以设置齿轮的惯性和粘性摩擦损失等属性。默认假设是惯性和粘性损失可以忽略不计。
该模块允许您指定驱动小齿轮和内部行星齿轮的惯性。要模拟从动齿轮的惯性,请将块 惯性连接到端口 D、S1 和 S2。
方程式
理想齿轮和齿轮比
差分*程序块对三个相连轴施加一个运动学约束:
其中
-
- 是太阳齿轮轴的转速 S1;
-
- 是太阳齿轮轴的转速 S2。
负值表示差速器位于中心线左侧。三个自由度简化为两对独立的齿轮:( ) 和 ( )。 - 是驱动小齿轮。
横向运动之和就是变换后的纵向运动。横向运动之差 与纵向运动无关。侧齿轮的总运动是这两个独立自由度的叠加,其物理意义如下:
-
纵向自由度相当于两根侧轴以相同的角速度( )旋转,并且相对于纵轴有固定的比率。
-
差动自由度相当于纵向驱动轴保持锁定, ,其中 是驱动轴的速度,侧轴以相反的方向相对旋转, 。
侧轴的扭矩受到纵轴扭矩的限制,因此总功率流为零:
其中
-
和 是沿横向轴的扭矩;
-
- 纵向扭矩;
-
- 功率损失。
在理想情况下,当运动学约束和功率约束相结合时,我们可以得到以下关系式:
其中 是纵向传动轴的传动比。
理想极限
差动*块的有效约束由锥齿轮行星齿轮箱的两个子约束组成。
-
第一个子限制与两个锥齿轮与驱动部分的连接有关:
其中 和 是太阳行星齿轮对的传动比。
-
第二个子限制与行星机构中驱动小齿轮与驱动轴的连接有关:
锥齿轮行星齿轮的传动比取决于太阳轮和行星轮的半径 ,其表示形式如下:
差分 块的实现考虑到了 ,使 可以自由定制。
非理想齿轮和齿轮损耗
在非理想情况下, (详见 具有损耗的机械齿轮建模)。
假设和限制
-
齿轮的惯性可以忽略不计。
-
齿轮被视为固体。
-
库仑摩擦会减慢模拟速度(详见 here)。
端口
非定向
#
D
—
传动轴
旋转力学
Details
与纵向驱动轴连接的非定向端口。
| 程序使用名称 |
|
#
中一
—
太阳齿轮*S1*
旋转力学
Details
与太阳齿轮*S1*连接的非定向端口。
| 程序使用名称 |
|
#
中二
—
太阳齿轮*S2*
旋转力学
Details
与太阳齿轮单元*S2*连接的非定向端口。
| 程序使用名称 |
|
#
H
—
热流量
温暖
Details
热流连接的非定向端口。
热端口允许您模拟单元和连接网络之间的热流。
依赖关系
要使用此端口,请将*摩擦模型*参数设置为 温度相关的效率.
| 程序使用名称 |
|
参数
Main
#
冠齿轮位置 —
环形齿轮布置
中心线左侧 | 中心线右侧
Details
锥齿轮环形齿轮相对于变速箱中心线的位置。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# 行星架(C)到驱动轴(D)齿数比 (NC/ND) — 驱动小齿轮与驱动轴小齿轮比率
Details
驱动小齿轮转数与驱动轴小齿轮纵向转数的恒定比 ,由驱动小齿轮的齿数除以驱动轴小齿轮的齿数确定。该比率必须">0"。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
啮合损耗
#
摩擦模型 —
摩擦模型
无啮合损失——适用于HIL仿真 | 恒定效率 | 温度相关效率
Details
传动装置中的摩擦模型。定义为
-
无啮合损耗 - 适用于 HIL 仿真 ` - 假设齿轮传动是完美的。
-
效率恒定` - 齿轮对之间的扭矩传递因效率恒定值 而减小,因此 。
-
与温度相关的效率` - 齿轮对之间的扭矩传输由温度和效率对应的插值表决定。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# 太阳轮-太阳轮及行星架-传动轴常规效率 — 扭矩传递效率值矢量
Details
从主齿轮到从动太阳齿轮以及从托架到纵向传动轴的效率值矢量 [ ]。矢量的元素范围必须是 (0,1]。
依赖关系
要使用该参数,请将 摩擦模型 参数设置为 "恒定效率"。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
温度 —
温度值向量
K | degC | degF | degR | deltaK | Δ℃ | deltadegF | deltadegR
Details
温度值矢量,用于构建温度与效率对应关系插值表。矢量元素应单调递增。
依赖关系
要使用此参数,请将 摩擦模型 参数设置为 "随温度变化的效率"。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 太阳轮-太阳轮效率 — 从驱动太阳齿轮到从动太阳齿轮的扭矩传递效率值矢量
Details
描述从主太阳齿轮到从动太阳齿轮的功率流的输出与输入功率比值向量 。该装置利用这些值建立温度和效率对应插值表。
每个元素都是与温度*参数值矢量中相应温度值相关的效率值。矢量的长度必须等于*温度*参数矢量的长度。向量的每个元素必须在 `(0,1]`范围内。
依赖关系
要使用此参数,请将 摩擦模型 参数设置为 "取决于温度的效率"。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# 差速器壳体-传动轴效率 — 从驱动小齿轮到驱动轴的扭矩传递效率矢量值
Details
描述从驱动小齿轮到驱动轴的功率流的输出与输入功率比向量 。该装置利用这些值建立温度和效率对应插值表。
每个元素都是与温度*参数值矢量中相应温度值相关的效率值。矢量的长度必须等于*温度*参数矢量的长度。向量的每个元素必须在 `(0,1]`范围内。
依赖关系
要使用此参数,请将 摩擦模型 参数设置为 "取决于温度的效率"。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
太阳轮-行星架和传动轴-壳体功率阈值 —
最小阈值功率
W | uW | mW | kW | MW | GW | V*A | HP_DIN
Details
分别为太阳齿轮和传动轴的功率阈值矢量 [ ]。 高于这些值时,采用全效率值。低于这些值时,双曲正切函数将平滑效率值。
-
通过将* 摩擦模型*参数设置为 "恒定效率",该装置可在无功率传输时将损耗降至零。
-
如果将* 摩擦模型*参数设置为 "随温度变化的效率",设备将在静止时的效率值为零与温度和效率插值表中给出的值之间平滑效率值。
依赖关系
要使用此参数,请将 摩擦模型 设为 "恒定效率 "或 "随温度变化的效率"。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
粘性损失
#
太阳轮-行星架和传动轴-壳体粘性摩擦系数 —
齿轮间的粘性摩擦系数
N*m*s/rad | mN*m*s/rad | kN*m*s/rad | kgf*m*s/rad | lbf*ft*s/rad
Details
行星齿轮和传动轴的粘性摩擦系数矢量,[ ]。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
转动惯量
# 惯性 — 惯性模型
Details
选择此复选框可启用齿轮的惯性模型。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
#
行星架惯性 —
驱动小齿轮的转动惯量
m^2 | g*m^2 | kg*cm^2 | cm^2 | lbm*in^2 | ft^2 | slug*in^2 | ft^2
Details
行星驱动齿轮的转动惯量。
依赖关系
要使用该参数,请选择 惯性 复选框。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
行星齿轮转动惯量 —
行星齿轮的转动惯量
m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | ft^2 | slug*in^2 | ft^2
Details
行星齿轮的转动惯量。
依赖关系
要使用该参数,请选中 惯性 参数的复选框。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
热端口
#
热质量 —
热容
J/K | kJ/K
Details
元件温度变化一度所需的热能。热容量越大,元件对温度变化的抵抗力越强。
依赖关系
要使用此参数,请将 摩擦模型 参数设置为 "随温度变化的效率"。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
初始温度 —
初始温度
K | degC | degF | °R | 开尔文温差 | Δ℃ | deltadegF | deltadegR
Details
模拟开始时区块的温度。初始温度根据指定的矢量设置组件的初始效率值。
依赖关系
要使用该参数,请将 摩擦模型 参数设置为 "取决于温度的效率"。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |